
【導(dǎo)讀】小型無人機在現(xiàn)代軍事和民用領(lǐng)域的應(yīng)用已越來越廣泛。在經(jīng)歷了早期的遙控飛行后,目前其導(dǎo)航控制方式已經(jīng)發(fā)展為自主飛行和智能飛行。導(dǎo)航方式的改變對飛行控制計算機的精度提出了更高的要求;隨著小型無人機執(zhí)行任務(wù)復(fù)雜程度的增加,對飛控計算機運算速度的要求也更高。
而小型化的要求對飛控計算機的功耗和體積也提出了很高的要求。高精度不僅要求計算機的控制精度高,而且要求能夠運行復(fù)雜的控制算法,小型化則要求無人機的體積小,機動性好,進(jìn)而要求控制計算機的體積越小越好。
在眾多處理器芯片中,最適合小型飛控計算機CPU的芯片當(dāng)屬TI公司的TMS320LF2407($8.8313),其運算速度以及眾多的外圍接口電路很適合用來完成對小型無人機的實時控制功能。它采用哈佛結(jié)構(gòu)、多級流水線操作,對數(shù)據(jù)和指令同時進(jìn)行讀取,片內(nèi)自帶資源包括16路10位A/D轉(zhuǎn)換器且?guī)ё詣优判蚬δ?,保證最多16路有轉(zhuǎn)換在同一轉(zhuǎn)換期間進(jìn)行,而不會增加CPU的開銷;40路可單獨編程或復(fù)用的通用輸入/輸出通道;5個外部中斷;集成的串行通信接口(SCI),可使其具備與系統(tǒng)內(nèi)其他控制器進(jìn)行異步(RS 485)通信的能力;16位同步串行外圍接口(SPI)能方便地用來與其他的外圍設(shè)備通信;還提供看門狗定時器模塊(WDT)和CAN通信模塊。
飛控系統(tǒng)組成模塊
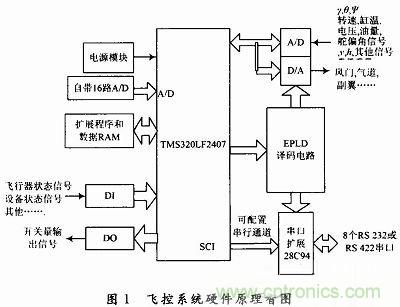
飛控系統(tǒng)實時采集各傳感器測量的飛行狀態(tài)數(shù)據(jù)、接收無線電測控終端傳輸?shù)挠傻孛鏈y控站上行信道送來的控制命令及數(shù)據(jù),經(jīng)計算處理,輸出控制指令給執(zhí)行機構(gòu),實現(xiàn)對無人機中各種飛行模態(tài)的控制和對任務(wù)設(shè)備的管理與控制;同時將無人機的狀態(tài)數(shù)據(jù)及發(fā)動機、機載電源系統(tǒng)、任務(wù)設(shè)備的工作狀態(tài)參數(shù)實時傳送給機載無線電數(shù)據(jù)終端,經(jīng)無線電下行信道發(fā)送回地面測控站。按照功能劃分,該飛控系統(tǒng)的硬件包括:主控制模塊、信號調(diào)理及接口模塊、數(shù)據(jù)采集模塊以及舵機驅(qū)動模塊等。具體的硬件構(gòu)成原理如圖1所示。
模塊功能
各個功能模塊組合在一起,構(gòu)成飛行控制系統(tǒng)的核心,而主控制模塊是飛控系統(tǒng)核心,它與信號調(diào)理模塊、接口模塊和舵機驅(qū)動模塊相組合,在只需要修改軟件和簡單改動外圍電路的基礎(chǔ)上可以滿足一系列小型無人機的飛行控制和飛行管理功能要求,從而實現(xiàn)一次開發(fā),多型號使用,降低系統(tǒng)開發(fā)成本的目的。系統(tǒng)主要完成如下功能:
(1)完成多路模擬信號的高精度采集,包括陀螺信號、航向信號、舵偏角信號、發(fā)動機轉(zhuǎn)速、缸溫信號、動靜壓傳感器信號、電源電壓信號等。由于CPU自帶A/D的精度和通道數(shù)有限,所以使用了另外的數(shù)據(jù)采集電路,其片選和控制信號是通過EPLD中譯碼電路產(chǎn)生的。
(2)輸出開關(guān)量信號、模擬信號和PWM脈沖信號等能適應(yīng)不同執(zhí)行機構(gòu)(如方向舵機、副翼舵機、升降舵機、氣道和風(fēng)門舵機等)的控制要求。
(3)利用多個通信信道,分別實現(xiàn)與機載數(shù)據(jù)終端、GPS信號、數(shù)字量傳感器以及相關(guān)任務(wù)設(shè)備的通信。由于CPU自身的SCI通道配置的串口不能滿足系統(tǒng)要求,設(shè)計中使用多串口擴展芯片28C94來擴展8個串口。
系統(tǒng)軟件設(shè)計
該系統(tǒng)的軟件設(shè)計分為2部分,即邏輯電路芯片EPLD譯碼電路的程序設(shè)計和飛控系統(tǒng)的應(yīng)用程序設(shè)計。
邏輯電路程序設(shè)計
EPLD 用來構(gòu)成數(shù)字邏輯控制電路,完成譯碼和隔離以及為A/D,D/A,28C94提供片選信號和讀/寫控制信號的功能。該軟件的設(shè)計采用原理圖輸入和 VERILOG HDL語言編程的混合設(shè)計方式,遵循設(shè)計輸入→設(shè)計實現(xiàn)→設(shè)計校驗→器件編程的流程。系統(tǒng)使用了兩片ispLSI1048芯片,分別用來實現(xiàn)對 A/D,D/A的控制和對串口擴展芯片28C94的控制。
系統(tǒng)應(yīng)用程序設(shè)計
由于C語言不但能夠編寫應(yīng)用程序、系統(tǒng)程序,還能像匯編語言一樣直接對計算機硬件進(jìn)行控制,編寫的程序可移植性強。由于以DSP為核心設(shè)計的系統(tǒng)中涉及到大量對外設(shè)端口的操作,以及考慮后續(xù)程序移植的工作,所以飛控系統(tǒng)的應(yīng)用程序選用BC 3.1來設(shè)計,分別實現(xiàn)飛行控制和飛行管理功能。
軟件按照功能劃分為4個模塊:時間管理模塊、數(shù)據(jù)采集與處理模塊、通信模塊、控制律解算模塊。通過時間管理模塊在毫秒級時間內(nèi)對無人機進(jìn)行實時控制;數(shù)據(jù)采集模塊采集無人機的飛行狀態(tài)、姿態(tài)參數(shù)以及飛行參數(shù)、飛行狀態(tài)及飛行參數(shù)進(jìn)行遙測編碼并通過串行接口傳送至機載數(shù)據(jù)終端,通過無線數(shù)據(jù)信道發(fā)送到地面控制站進(jìn)行飛行監(jiān)控;姿態(tài)參數(shù)通過軟件內(nèi)部接口送控制律解算模塊進(jìn)行解算,并將結(jié)果通過D/A通道送機載伺服系統(tǒng),控制舵機運行,達(dá)到調(diào)整、飛機飛行姿態(tài)的目的;通信模塊完成飛控計算機與其他機載外設(shè)之間的數(shù)據(jù)交換功能。
利用高速DSP控制芯片在控制律計算和數(shù)據(jù)處理方面的優(yōu)勢及其豐富的外部資源,配合大規(guī)??删幊踢壿嬈骷﨏PLD以及串行接口擴展芯片28C94設(shè)計小型機載飛控計算機,以其為核心設(shè)計的小型無人機飛控系統(tǒng)具有功能全,體積小,重量輕,功耗低的特點,很好地滿足了小型無人機對飛控計算機高精度、小型化、低成本的要求。該設(shè)計已成功應(yīng)用于某驗證無人機系統(tǒng)。
推薦閱讀:


