
【導(dǎo)讀】傳感器性能對MEMS和ASIC參數(shù)的高度依賴性表明,閉環(huán)傳感器的系統(tǒng)級設(shè)計需要做大量的折衷考慮,其中的ASIC噪聲預(yù)算、激勵電壓、功耗和技術(shù)都高度依賴于MEMS參數(shù)。因此為了實(shí)現(xiàn)最優(yōu)的傳感器,強(qiáng)烈推薦基于傳感器總體目標(biāo)規(guī)格的ASIC與MEMS協(xié)同設(shè)計方法,而不是針對已經(jīng)設(shè)計好的MEM再進(jìn)行ASIC設(shè)計。
微機(jī)械式慣性傳感器已經(jīng)成為許多消費(fèi)產(chǎn)品的一個組成部分,比如手持式移動終端、照相機(jī)和游戲控制器等。此外,微機(jī)械式慣性傳感器還被廣泛用于工業(yè)、汽車安全和穩(wěn)定控制以及導(dǎo)航領(lǐng)域中的振動監(jiān)測。一般來說,微型傳感器可以是壓電式、壓阻式或電容式傳感器。然而,電容式傳感的高熱穩(wěn)定性和高靈敏度使得它對種類廣泛的應(yīng)用來說更具吸引力。
帶數(shù)字讀取功能的基本的電容式傳感器接口電路由電容到電壓轉(zhuǎn)換器(C/V),以及隨后的模數(shù)轉(zhuǎn)換器(A/D)和信號調(diào)節(jié)電路組成。以開環(huán)配置(沒有反饋信號)運(yùn)行這種傳感器可以形成相對簡單的系統(tǒng),這種系統(tǒng)本身就比較穩(wěn)定。盡管如此,開環(huán)工作時的系統(tǒng)對MEMS參數(shù)會非常敏感。此外,整個系統(tǒng)的線性度受傳感器系統(tǒng)鏈中每個模塊的線性度影響,而且C/V和A/D的動態(tài)范圍要求可能會更加嚴(yán)格。相反,將MEMS傳感器放在負(fù)反饋閉環(huán)中使用有許多好處,例如改進(jìn)的帶寬、對MEMS器件的工藝和溫度變化具有較低的敏感性。另外,由于C/V只需要處理誤差信號,與開環(huán)工作方式相比,C/V動態(tài)范圍和線性指標(biāo)可以放寬。因此為確保系統(tǒng)的穩(wěn)定性,正確設(shè)計反饋環(huán)路就顯得非常重要。
在電容式傳感器中,反饋信號以電容激勵電極上的電壓信號形式施加到MEMS。這個施加的電壓將產(chǎn)生一個靜電力并作用到MEMS質(zhì)量塊上。因此最終形成的系統(tǒng)被稱為力反饋系統(tǒng)。然而,電容有一個二次的電壓比力關(guān)系,它會限制系統(tǒng)的線性度。
克服電壓比力(V/F)二次關(guān)系負(fù)擔(dān)的一種方法是以差分方式施加激勵信號,以便抵消二次項(xiàng)。然而,這種技術(shù)要求正負(fù)電壓值,這將增加傳感器接口ASIC的復(fù)雜性。更重要的是,差分工作所需的兩個激勵電容如果不匹配會導(dǎo)致激勵二次項(xiàng)不能完全抵消,因此電容不匹配將限制系統(tǒng)可實(shí)現(xiàn)的性能。
實(shí)現(xiàn)閉環(huán)工作的另外一種方法使用兩級bang-bang反饋信號。由于只用到兩個點(diǎn)的二次V/F關(guān)系,這種方法天生就是線性的,而且并不依賴MEMS電容的匹配或使用負(fù)電壓去抵消非線性。使用兩級激勵意味著將反饋信號幅度中的信息轉(zhuǎn)換為時間信息。因此Σ-Δ調(diào)制可以成為實(shí)現(xiàn)閉環(huán)數(shù)字讀取傳感器的一種有效技術(shù)。另外,基于Σ-Δ的環(huán)路默認(rèn)提供模數(shù)轉(zhuǎn)換功能,因此不需要再使用單獨(dú)的A/D。Σ-Δ閉環(huán)架構(gòu)代表了高性能數(shù)字讀取傳感器的最優(yōu)架構(gòu)。值得注意的是,Σ-Δ系統(tǒng)的超采樣特性會使操作系統(tǒng)工作在相對較高的頻率,因此系統(tǒng)變得較易受MEMS寄生電容耦合的影響。盡管如此,抵消這種耦合的電路技術(shù)已經(jīng)非常成熟,并且可以在傳感器的接口ASIC中實(shí)現(xiàn)。Σ-Δ閉環(huán)傳感器的架構(gòu)選擇需要依據(jù)為電子Σ-Δ系統(tǒng)開發(fā)的深層技術(shù)。然而,具有自然電子-機(jī)械特性的Σ-Δ閉環(huán)傳感器在系統(tǒng)級設(shè)計與優(yōu)化時需要正確理解MEMS的工作原理和建模機(jī)制。典型MEMS傳感器的檢測部分行為就像是一個二階集總式質(zhì)量塊(阻尼器)彈簧機(jī)械系統(tǒng),具有單一的諧振頻率,其傳遞函數(shù)如下:
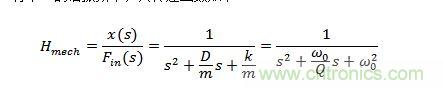
其中Fin(s)是輸入的力(在使用陀螺儀時是科里奧利力,在使用加速度計時是由于輸入加速產(chǎn)生的力)。x(s)是傳感器質(zhì)量塊對應(yīng)輸入力的位移。m是質(zhì)量塊的質(zhì)量,D是阻尼系數(shù),k是彈簧常數(shù)(剛度)。
MEMS傳感器的工作原理基于這樣一個事實(shí):給MEMS施加一個輸入力(Fin)將產(chǎn)生一定的位移,進(jìn)而改變MEMS電容(Cout)。這個Cout可以用連接MEMS單元的電路進(jìn)行測量。帶激勵電極的MEMS傳感器建模如圖1所示。這個模型的增益是Kx/c,代表由于MEMS質(zhì)量塊位移引起的輸出電容變化。Kx/c等于:
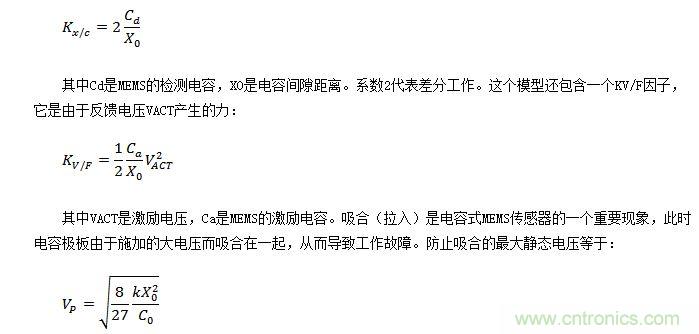
其中C0是電容的剩余容量。上述Vp表達(dá)式只是用于展示Vp的相關(guān)性。
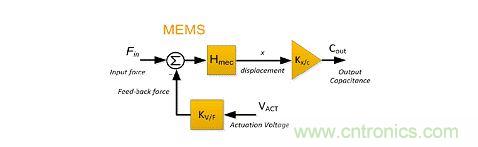
圖1:MEMS慣性傳感器傳感部分模型
但是在像Σ-Δ環(huán)路中那樣的動態(tài)電壓激勵情況下,上述表達(dá)式不能精確地表示Vp的實(shí)際值。在基于Σ-Δ的傳感器中,MEMS用作環(huán)路濾波器,會形成一個二階電子-機(jī)械式Σ-Δ系統(tǒng)。
將MEMS引入Σ-Δ環(huán)路可以提高階數(shù),并進(jìn)一步抑制量化噪聲。圖2顯示了基于Σ-Δ的傳感器框圖,其中的MEMS與特殊應(yīng)用集成電路(ASIC)連接在一起組成了一個完整的傳感器。這個系統(tǒng)還集成了一個額外的Hcomp塊,用于補(bǔ)償環(huán)路并保持其穩(wěn)定性。
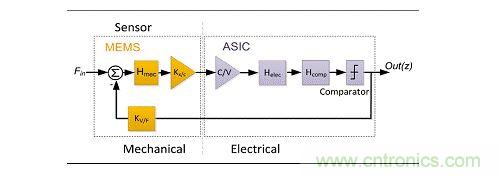
圖2: 基于Σ-Δ的閉環(huán)傳感器框圖
這種閉環(huán)傳感器的系統(tǒng)級設(shè)計將確定各個MEMS和ASIC參數(shù)的最優(yōu)值,比如剛度(k)、間隙距離(X0)、阻尼系數(shù)(D)、激勵電壓(VACT)和 ASIC噪聲。為了確保Σ-Δ環(huán)路的穩(wěn)定工作,傳感器的輸入信號不能超過反饋信號。因此激勵電壓值VACT定義了給定MEMS參數(shù)集條件下允許的最大輸入信號。然而,為了允許大的輸入信號范圍而產(chǎn)生大的VACT會導(dǎo)致功耗加大,而且有時要求采用特殊的ASIC技術(shù)才能允許高壓工作。ASIC技術(shù)的選擇將影響到傳感器的總體成本。更重要的是,VACT允許的最大值受MEMS吸合電壓Vp的限制。
MEMS間隙距離(X0)是系統(tǒng)能否實(shí)現(xiàn)低噪聲工作的一個關(guān)鍵參數(shù)。減小X0會產(chǎn)生更高的Cd和Kx/c,并因此增加MEMS前向增益(靈敏度)。高靈敏度可以減少ASIC噪聲對以傳感器輸入為參考的噪聲的影響。另一方面,MEMS的布朗噪聲功率直接正比于阻尼系數(shù)(D)。總的傳感器噪聲由MEMS噪聲和 ASIC噪聲組成??梢愿鶕?jù)傳感器總體目標(biāo)性能、MEMS靈敏度和阻尼系數(shù)估計最大可容忍的ASIC噪聲值。應(yīng)該注意的是,可以達(dá)到的最小X0受MEMS 技術(shù)的限制。X0值對最大輸入范圍的影響,取決于激勵電壓(VACT)是否受限于MEMS的吸合電壓。如果VACT受吸合電壓的限制,那么減小X0將導(dǎo)致允許的最大輸入信號范圍減小。如果VACT不受吸合電壓的限制,那么X0的減小和激勵電容(Ca)及KV/F的改進(jìn)可形成更高的反饋力,最終形成更大的輸入范圍。
MEMS單元的剛度(k)是一個重要的系統(tǒng)設(shè)計參數(shù),因?yàn)樗梢栽贛EMS單元中得到很好的控制,不像X0,其最小值受MEMS技術(shù)的限制。假設(shè)ASIC 噪聲主導(dǎo)傳感器噪聲,那么可實(shí)現(xiàn)的最大動態(tài)范圍(VACT設(shè)為吸合之前的最大允許值)將獨(dú)立于一階k值。這是因?yàn)樵黾觡不僅會降低MEMS靈敏度,增加以傳感器輸入為參考的ASIC噪聲,而且也會使反饋力增加同樣的數(shù)量,因?yàn)檫@種方法允許在更高的VACT時工作。在MEMS噪聲主導(dǎo)傳感器性能的情況下,應(yīng)增加k值,以便支持更大的動態(tài)范圍。而在工作不受吸合限制的情況下,最好是減小k值,從而提高M(jìn)EMS靈敏度,減小ASIC噪聲對傳感器噪聲的影響。需要注意的是,k值會改變MEMS單元的諧振頻率。在開環(huán)傳感器中,諧振頻率設(shè)定了傳感器帶寬的上限,而對閉環(huán)系統(tǒng)來說不是這樣。因此k值可以根據(jù)動態(tài)范圍和噪聲要求進(jìn)行設(shè)置。
傳感器性能對MEMS和ASIC參數(shù)的高度依賴性表明,閉環(huán)傳感器的系統(tǒng)級設(shè)計需要做大量的折衷考慮,其中的ASIC噪聲預(yù)算、激勵電壓、功耗和技術(shù)都高度依賴于MEMS參數(shù)。因此為了實(shí)現(xiàn)最優(yōu)的傳感器,強(qiáng)烈推薦基于傳感器總體目標(biāo)規(guī)格的ASIC與MEMS協(xié)同設(shè)計方法,而不是針對已經(jīng)設(shè)計好的MEM再進(jìn)行ASIC設(shè)計。



