
【導(dǎo)讀】相控陣?yán)走_(dá)采用電子掃描的方法實(shí)現(xiàn)雷達(dá)波束的無(wú)慣性掃描,因此相控陣也叫電子掃描陣列(ESA)。對(duì)于相控陣天線輻射的電磁場(chǎng)及其能量分布通常用歸一化的天線方向圖來(lái)描述,它反映波束形狀、天線增益、副瓣等特性。
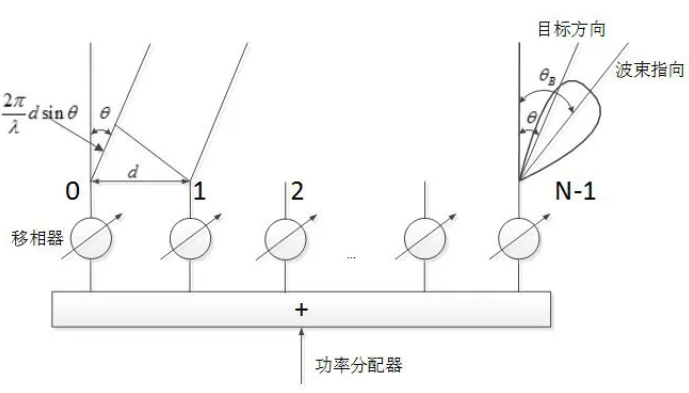
波束的指向始終與等相位面垂直,而等相位面由陣元間的饋相關(guān)系確定,因此在各個(gè)陣元都是等幅饋電情況下,線性陣的波束方向圖函數(shù)為sinc函數(shù)。通過(guò)公式詳細(xì)分析影響相控陣?yán)走_(dá)波束寬度的因素,這里是一維均勻線陣波束寬度的計(jì)算公式:
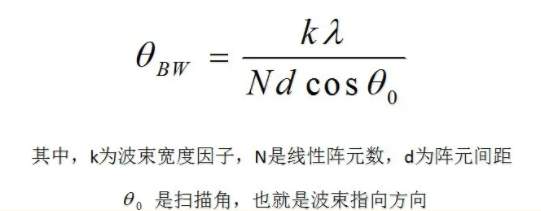
通常,均勻口徑照射情況下3dB波束寬度的k=0.886,若是4dB波束寬度的k=1;其他也可以定義10dB波束寬度等。
我們仿真一個(gè)極坐標(biāo)下線陣的波束掃描動(dòng)圖,其中外圈標(biāo)注的是度數(shù)-90~90°,0°表示垂直于線陣的方向。其中,一圈一圈的環(huán)代表的是幅度,這里進(jìn)行了歸一化,指向0°時(shí)是0dB。仿真時(shí)設(shè)置:N=16,d=λ/2,波束指向從-60~60°,得到下面的動(dòng)圖:
從該動(dòng)圖可以看出:
1. 波束指向角越大,波束寬度越大。
2. 隨著波束指向的增大,增益降低。
3. 沒(méi)有進(jìn)行降低旁瓣的加權(quán),旁瓣較高。
4. 陣元間距為半波長(zhǎng),沒(méi)有產(chǎn)生柵瓣。
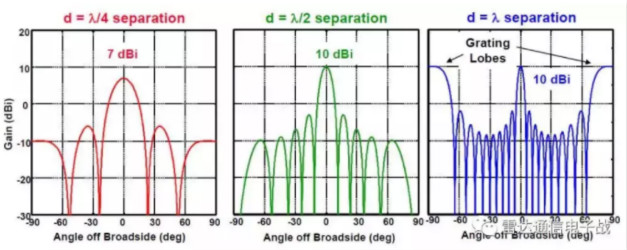
陣元間距的影響
陣因子是一個(gè)周期函數(shù),如果陣元間距取值不合適,相控陣天線掃描時(shí)的輻射場(chǎng)會(huì)在主瓣以外形成與主波束類似的有規(guī)律的輻射波束,常被稱為柵瓣。一個(gè)好的ESA設(shè)計(jì)必須考慮柵瓣的影響,這里直接給出結(jié)果:
相控陣的最大掃描角既不會(huì)是0度,也不會(huì)接近90度;假如線性陣的波束最大掃描角度為60度,那么陣元間距d小于0.54的波長(zhǎng)就不會(huì)出現(xiàn)柵瓣了。所以,在可以的范圍內(nèi)適當(dāng)增大天線陣元間距以減少數(shù)量來(lái)達(dá)到相同的口徑降低成本。
還有一點(diǎn)需要注意的就是這里的波長(zhǎng)要選擇工作帶寬中最短的波長(zhǎng)來(lái)計(jì)算,這是因?yàn)殚g距如果保證了最短波長(zhǎng)的情況都不出現(xiàn)柵瓣了,那它肯定也就滿足了波長(zhǎng)更長(zhǎng)的情況。
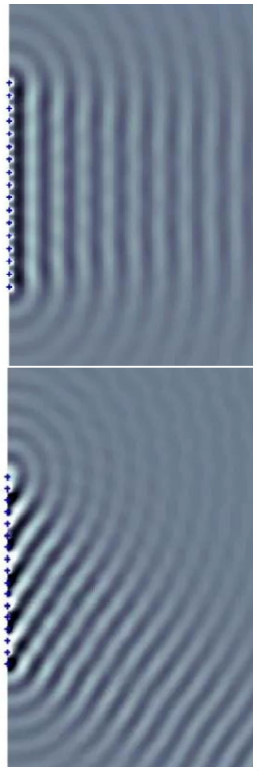
總結(jié)來(lái)說(shuō),“陣元間距取半波長(zhǎng)左右”基本不會(huì)有啥問(wèn)題;如果你想放寬一點(diǎn),那就要結(jié)合你的最大掃描角進(jìn)行權(quán)衡了;如果你想看看出現(xiàn)刪瓣的情況,下面的兩個(gè)動(dòng)圖僅設(shè)置的陣元間距不同,其他參數(shù)同上面動(dòng)圖。
d=2λ
來(lái)源:雷達(dá)通信電子戰(zhàn)
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問(wèn)題,請(qǐng)聯(lián)系小編進(jìn)行處理。
推薦閱讀:


