
【導(dǎo)讀】關(guān)于相控陣天線方向圖,我們將分三部分介紹,這是第二篇文章。 在第一部分中,我們介紹了相控陣轉(zhuǎn)向概念,并查看了影響陣列增益的因素。在第二部分,我們將討論柵瓣和波束斜視。柵瓣很難可視化,所以我們利用它們與數(shù)字轉(zhuǎn)換器中信號(hào)混疊的相似性,將柵瓣想象為空間混疊。接下來,我們探討波束斜視的問題。波束斜視是我們使用相移,而不是使用真實(shí)時(shí)間延遲來使波束轉(zhuǎn)向時(shí),天線在頻段范圍內(nèi)無聚焦的現(xiàn)象。我們還將討論這兩種轉(zhuǎn)向方法之間的權(quán)衡取舍,并了解波束斜視對(duì)典型系統(tǒng)的影響。
柵瓣簡介
到目前為止,我們只見過元件間隔為d = λ/2這種情況。圖1開始說明為什么λ/2的元件間隔在相控陣中如此常見。圖中共顯示兩種情況。首先,是藍(lán)色線條,重復(fù)顯示第1部分圖11中的30°圖。接下來,d/λ間隔增加到0.7,以顯示天線方向如何變化。注意,隨著間隔增加,波束寬度減小,這是一個(gè)積極現(xiàn)象。零值間隔減小使它們的距離更接近,這也可以接受。但是現(xiàn)在出現(xiàn)了第二個(gè)角度,在本例中為–70°,在該角度下出現(xiàn)了全陣列增益。這是最為不利的情況。這種天線增益復(fù)制被定義為一個(gè)柵瓣,可以被認(rèn)為是空間混疊。
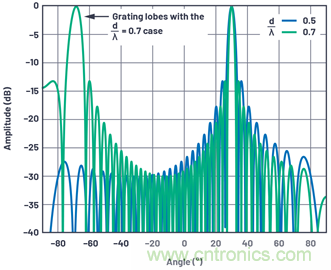
圖1.在兩種不同的d/λ間隔下,32元件線性陣列的標(biāo)準(zhǔn)化陣列因子。
采樣系統(tǒng)的類比
為實(shí)現(xiàn)柵瓣可視化,可以將其類比為采樣系統(tǒng)中的混疊現(xiàn)象。在模數(shù)轉(zhuǎn)換器(ADC)中,接收器結(jié)構(gòu)通常會(huì)對(duì)頻率進(jìn)行欠采樣。欠采樣包括有意降低采樣率(fS),通過采樣過程將高于fS/2的頻率(較高的奈奎斯特區(qū))轉(zhuǎn)換為第一個(gè)奈奎斯特區(qū)的混疊。這使得這些較高頻率看起來似乎在ADC輸出端為較低頻率。
可以考慮在相控陣中采用類似的類比方法,在該陣列中,由元件對(duì)波前進(jìn)行空間采樣。如果我們建議為了避免混疊,對(duì)每個(gè)波長實(shí)施兩次采樣(即元件),那么奈奎斯特準(zhǔn)則可以擴(kuò)展應(yīng)用到空間區(qū)域。因此,如果元件間隔大于λ/2,我們可以考慮這種空間混疊。
計(jì)算柵瓣出現(xiàn)的位置
但是這些空間混疊(柵瓣)會(huì)出現(xiàn)在哪里?在第1部分中,我們展示了整個(gè)陣列中元件的相移與波束角度之間的函數(shù)關(guān)系。
反過來,我們可以根據(jù)與相移的函數(shù)關(guān)系來計(jì)算波束角度。

arcsin函數(shù)只產(chǎn)生-1和+1之間的實(shí)數(shù)解。在這些范圍之外,無法得到實(shí)數(shù)解,電子數(shù)據(jù)表軟件中會(huì)出現(xiàn)“#NUM!”。還要注意,方程2中的相位呈周期性,每隔2π重復(fù)一次。所以,我們可以使用(m × 2π + ?Φ)取代波束轉(zhuǎn)向公式中的?Φ,進(jìn)而得出公式3。

其中m = 0、±1、±2…
為了避免柵瓣,我們的目標(biāo)是獲得單一實(shí)數(shù)解。從數(shù)學(xué)上講,這通過使下式成立來實(shí)現(xiàn)
如果我們這樣做,那么所有的空間圖像(即m =±1、±2等)將產(chǎn)生非實(shí)數(shù)arcsin結(jié)果,我們可以忽略它們。但如果我們不能這樣做,那么某些m > 0的值會(huì)產(chǎn)生實(shí)數(shù)arcsin結(jié)果,那么我們會(huì)得出多個(gè)解:柵瓣。

圖2.arcsin函數(shù)在柵瓣中的應(yīng)用。
d > λ和λ = 0°的柵瓣
讓我們嘗試通過一些示例來更好地說明這一點(diǎn)。首先,考慮機(jī)械軸線校準(zhǔn)示例,其中θ = 0,所以?Φ = 0。然后,將公式3簡化為公式5。

通過這種簡化,可以明顯看出,如果λ/d > 1,那么只有當(dāng)m = 0,才可以得出在–1和+1之間的參數(shù)。這個(gè)參數(shù)就是0,且arcsin(0) = 0°,也就是機(jī)械軸線校準(zhǔn)角度。這就是我們期望獲得的結(jié)果。此外,m ≥ 1時(shí),arcsin參數(shù)會(huì)非常大(>1),不會(huì)得出實(shí)數(shù)結(jié)果。我們可以看到,θ = 0和d < λ時(shí),沒有柵瓣。
但是,如果d > λ(使得λ/d < 1),則會(huì)存在多個(gè)解和柵瓣。例如,如果λ/d = 0.66(即d = 1.5λ),則m = 0和m = ±1時(shí)存在arcsin實(shí)數(shù)解。m = ±1是第二個(gè)解,是所需信號(hào)的空間混疊。因此,我們會(huì)看到三個(gè)主瓣,分別位于arcsin(0×0.66)、arcsin(1×0.66)和arcsin(-1×0.66),每個(gè)的振幅都大約相等。如果用度數(shù)表示,這些角度為0°和±41.3°。事實(shí)上,這就是圖3中的陣列因子圖所示的內(nèi)容。
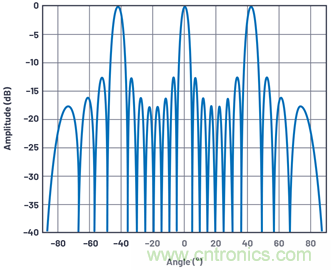
圖3.d/λ = 1.5、N = 8時(shí),軸線校準(zhǔn)的陣列因子。
λ/2 < d < λ時(shí)的柵瓣
在簡化柵瓣方程(方程5)時(shí),我們選擇只看機(jī)械軸線校準(zhǔn)(?Φ= 0)。我們還看到,在機(jī)械軸線校準(zhǔn)時(shí),d < λ時(shí)不會(huì)出現(xiàn)柵瓣。但是從采樣理論類比中,我們知道,當(dāng)間隔大于λ/2時(shí),會(huì)出現(xiàn)一些類型的柵瓣。所以,當(dāng)λ/2 < d < λ時(shí),柵瓣在什么位置?
首先,回顧一下在第1部分的圖4中,相位是如何隨轉(zhuǎn)向角度變化的。我們看到,當(dāng)主瓣偏離機(jī)械軸線校準(zhǔn)時(shí),?Φ的范圍為0至±π。因此,
的范圍為

|m|≥1時(shí),其值則超出該范圍
如果我們想要在所有|m| ≥ 1的情況下,保持整個(gè)arcsin參數(shù)> 1,則會(huì)限制最小可允許的λ/d??紤]兩種情況:
● 如果λ/d ≥ 2(即d ≤ λ/2),則無論m的值為多少,都不會(huì)出現(xiàn)多個(gè)解。m > 0的所有解都會(huì)導(dǎo)致arcsin參數(shù) > 1。這是唯一避免水平方向出現(xiàn)柵瓣的方法。
● 但是,如果我們有意將?Φ限制為小于±π,那么我們可以接受較小的λ/d,且不會(huì)出現(xiàn)柵瓣。減小?Φ的范圍意味著減小陣列的最大轉(zhuǎn)向角度。這是一種有趣的權(quán)衡,將在下一節(jié)中探討。
元件間隔考慮
元件間隔是否應(yīng)該始終小于λ/2?并非如此!這就是天線設(shè)計(jì)人員需要作出的考慮和權(quán)衡。如果波束完全被轉(zhuǎn)到水平方向,且θ = ±90°,則需要元件間隔為λ/2(如果可見的半圓內(nèi)不允許出現(xiàn)柵瓣)。但在實(shí)際操作中,可實(shí)現(xiàn)的最大轉(zhuǎn)向角度總是小于90°。這是由于元件因子,以及在大轉(zhuǎn)向角度下的其他降低引起的。
從圖2所示的arcsin圖中,我們可以看出,如果y軸θ限制為減小的限值,則柵瓣只在不會(huì)使用的掃描角度下出現(xiàn)。對(duì)于給定的元件間隔(dmax)來說,這種減小的限值(θmax)是多少?我們之前說過,我們的目標(biāo)是使下式成立
我們可以用它來計(jì)算第一個(gè)柵瓣(m =±1)出現(xiàn)的位置?,F(xiàn)在使用第1部分用于?Φ的公式1,得出:

可以簡化為
然后得出dmax
該dmax 是在減小的掃描角度(θmax)下沒有柵瓣的條件,其中θmax 小于π/2 (90°)。例如,如果信號(hào)頻率為10 GHz,我們需要在沒有柵瓣的情況下轉(zhuǎn)向±50°,則最大元件間隔為:
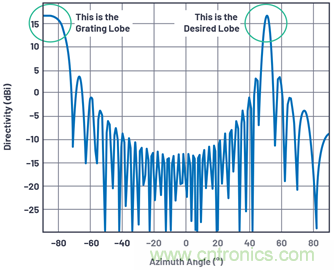
圖4.θ = 50°、N = 32、d = 17 mm且Φ = 10 GHz時(shí),柵瓣開始在水平方向出現(xiàn)。
通過限制最大掃描角度,可以自由地?cái)U(kuò)展元件間隔,增加每個(gè)通道的物理尺寸,以及擴(kuò)展給定數(shù)量的元件的孔徑。例如,可以利用這個(gè)現(xiàn)象,為天線分配相當(dāng)狹窄的預(yù)定義方向。元件增益可以增大,以在預(yù)先定義的方向上提供方向性,元件間隔也可以增大,以實(shí)現(xiàn)更大孔徑。這兩種方法都能在較窄的波束角度下獲得較大的整體天線增益。
注意,方程3表示最大間隔為一個(gè)波長,即使在零轉(zhuǎn)向角度下也是如此。在一些情況下,如果柵瓣不出現(xiàn)在可見半圓內(nèi)即可。以地球同步衛(wèi)星為例,會(huì)以機(jī)械軸線校準(zhǔn)為中心,按9°的轉(zhuǎn)向角度覆蓋整個(gè)地球。在這種情況下,只要柵瓣不落在地球表面就可以。因此,元件間隔可以達(dá)到幾個(gè)波長,使得波束寬度更窄。
還有一些值得注意的天線結(jié)構(gòu),試圖通過形成不一致的元件間隔來克服柵瓣問題。這些被歸類為非周期陣列,以螺旋陣列為例。由于機(jī)械天線構(gòu)造的原因,我們可能希望有一個(gè)通用的可以擴(kuò)展為更大陣列的構(gòu)建模塊,但是,這會(huì)形成一致的陣列,會(huì)受所述的柵瓣條件影響。
波束斜視
在第1部分中,我們開頭描述了在波峰接近元件陣列時(shí),如何基于相對(duì)于軸線校準(zhǔn)的波峰角度θ在元件之間出現(xiàn)時(shí)間延遲。對(duì)于單一頻率,可以用相移代替時(shí)間延遲來實(shí)現(xiàn)波束轉(zhuǎn)向。這種方法適用于窄帶波形,但對(duì)于通過相移產(chǎn)生波束轉(zhuǎn)向的寬帶波形,波束可能轉(zhuǎn)移方向(與頻率呈函數(shù)關(guān)系)。如果我們記得時(shí)間延遲是線性相移與頻率之間的關(guān)系,則可以直觀地解釋。所以,對(duì)于給定的波束方向,要求相移隨頻率變化。或者相反,對(duì)于給定的相移,波束方向隨頻率變化。波束角度隨頻率變化的狀況,被稱為波束斜視。
還考慮到在軸線校準(zhǔn)位置θ = 0時(shí),沒有跨元件的相移,因此不會(huì)產(chǎn)生任何波束斜視。因此,波束斜視的量必須與角度θ和頻率變化呈函數(shù)關(guān)系。圖5顯示一個(gè)X頻段示例。在本例中,中心頻率為10 GHz,調(diào)制帶寬為2 GHz,且很顯然波束隨頻率和初始波束角度的變化而改變方向。
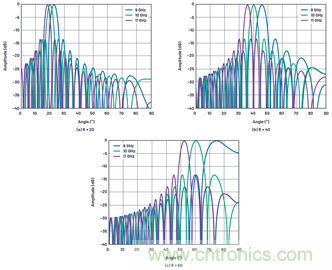
圖5.32元件線性陣在元件間隔為λ/2時(shí),在X頻段上的波束斜視示例。
波束斜視可以直接計(jì)算。使用公式1和公式2,可以計(jì)算得出波束方向偏差和波束斜視

此公式如圖6所示。在圖6中,顯示的f/f0比率是有意的。前一個(gè)方程的倒數(shù)(f0/f)提供了一種更容易的方法,可以更直觀地表示相對(duì)于中心頻率的變化。
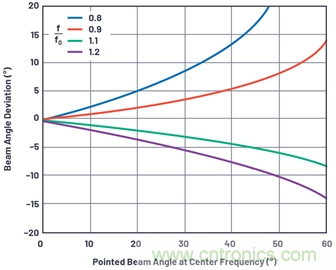
圖6.幾種頻率偏差下的波束斜視和波束角度。
關(guān)于波束斜視的幾點(diǎn)觀察發(fā)現(xiàn):
● 波束角度與頻率的偏差隨著波束角度偏離軸線校準(zhǔn)的角度增大而增大。
● 低于中心頻率的頻率比高于中心頻率的頻率產(chǎn)生更大的偏差。
● 低于中心頻率的頻率會(huì)使波束更加遠(yuǎn)離軸線校準(zhǔn)。
波束斜視考慮
波束斜視,即轉(zhuǎn)向角度與頻率的偏差,是由相移來實(shí)現(xiàn)時(shí)間延遲造成的。用真實(shí)時(shí)間延遲單元來執(zhí)行波束轉(zhuǎn)向則不會(huì)出現(xiàn)此問題。
既然波束斜視問題如此明顯,為什么還有人使用移相器,而不是時(shí)間延遲單元呢?一般而言,這歸因于設(shè)計(jì)簡單,以及移相器和時(shí)間延遲單元的IC可用性。時(shí)間延遲以某些傳輸線的形式實(shí)現(xiàn),所需的總延遲時(shí)間與孔徑大小呈函數(shù)關(guān)系。到目前為止,大多數(shù)可用的模擬波束成型IC都是基于相移,但也出現(xiàn)了一些真實(shí)時(shí)間延遲IC系列,它們?cè)谙嗫仃囍懈映R姟?/div>
在數(shù)字波束成型中,真實(shí)時(shí)間延遲可以采用DSP邏輯和數(shù)字波束成型算法實(shí)現(xiàn)。因此,對(duì)于每個(gè)元件都數(shù)字化的相控陣架構(gòu),它本身就可以解決波束斜視問題,并提供最高的編程靈活性。但是,這種解決方案的功能、尺寸和成本都會(huì)造成問題。
在混合波束成型中,子陣采用模擬波束成型,全陣采用數(shù)字波束成型。這可以提供一些值得考慮的波束斜視減少。波束斜視只受子陣影響,子陣的波束寬度更寬,因此對(duì)波束角度偏差的容忍度更大。因此,只要子陣的波束斜視是可容忍的,即可在后接真實(shí)時(shí)間延遲(數(shù)字波束成型)的子陣內(nèi)采用帶移相器的混合波束成型結(jié)構(gòu)。
總結(jié)
以上就是有關(guān)相控陣天線方向圖三部分中的第2部分內(nèi)容。在第1部分,我們介紹了波束指向和陣列因子。在第2部分,我們討論柵瓣和波束斜視的缺點(diǎn)。在第3部分,我們將討論如何通過天線變窄縮小旁瓣,并讓您深入了解移相器量化誤差。
參考電路
Balanis, Constantine A. 天線理論:分析與設(shè)計(jì),第3版。Wiley-Interscience,2005年。
Longbrake, Matthew. 用于雷達(dá)的真實(shí)時(shí)間延遲波束控制。2012年度IEEE全國航空與電子學(xué)會(huì)議(NAECON),IEEE,2012年。
Mailloux, Robert J. 相控陣天線手冊(cè),第2版。Artech House,2005年。
O’Donnell, Robert M. “雷達(dá)系統(tǒng)工程:簡介。”IEEE,2012年6月。
Skolnik,Merrill.雷達(dá)手冊(cè),第3版。 McGraw Hill2008年。
推薦閱讀:




