

【導(dǎo)讀】功率因數(shù)校正(PFC)對于工業(yè)電機驅(qū)動來說越來越重要。這主要是因為公用事業(yè)公司一端加強諧波含量監(jiān)管所導(dǎo)致的。但部署PFC也有好的一面,比如改善整體系統(tǒng)效率、導(dǎo)體額定值和分配電壓質(zhì)量;這些優(yōu)點對于工業(yè)環(huán)境下的其他負載(如直接在線感應(yīng)電機和變壓器)可能是很重要的。
PFC可以使用有源電路拓撲來實現(xiàn),比如單相[1]或三相升壓型整流器[2],或者通過無源方式實現(xiàn);后者需正確使用低頻電感和電容,以便形成交流線路電流包絡(luò)。兩種形式的PFC均試圖重現(xiàn)正弦或近似正弦的線路電流,并與線路電壓同相,從而最大程度減少來自公用事業(yè)公司、產(chǎn)生損耗的諧波電流和無功功率流。有源和無源PFC之間的權(quán)衡取舍與成本、無源元件權(quán)重和數(shù)量,以及PFC相關(guān)損耗有關(guān)。
在單相電機驅(qū)動中,有源PFC使用廣泛。對于三相系統(tǒng)而言,無源諧波校正使用更廣,且三相線路上通常含有50 Hz或60 Hz大電感,或者在整流器的直流側(cè)含有單個電感。然而,在較高功率下使用有源PFC能獲得某些優(yōu)勢。有源PFC解決方案(直流或交流側(cè))可提供最優(yōu)電感尺寸、更低的功率損耗、重量和最佳功率因數(shù)。
在單相應(yīng)用中(比如低功耗電機驅(qū)動),默認使用如圖1所示的整流器輸入升壓轉(zhuǎn)換器。
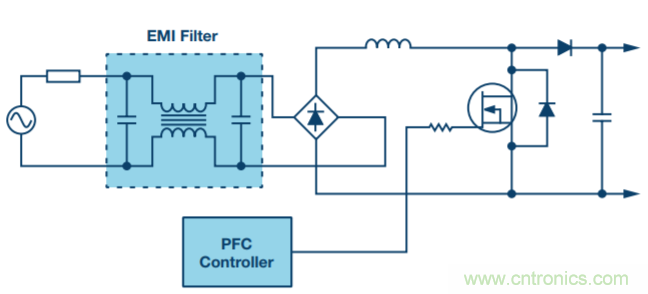
圖1. 單相升壓PFC電路。
這些器件通常在50 kHz至100 kHz頻率范圍內(nèi)進行開關(guān),因而相比無源解決方案需要使用較小的直流側(cè)電感。對于三相系統(tǒng)而言,單開關(guān)拓撲可以包含交流或直流側(cè)高頻電感。
實現(xiàn)PFC控制的一個障礙是使用PFC電路和PFC控制器導(dǎo)致成本上升。系統(tǒng)內(nèi)處理器處于隔離柵安全超低電壓(SELV)側(cè)的情況尤為如此。這種情況下,從主電機控制處理器內(nèi)部實現(xiàn)PFC控制會增加復(fù)雜程度與成本,因為需將交流側(cè)測量結(jié)果和控制信號與處理器I/O和ADC相隔離。此外,若要采用通常針對10 kHz至20 kHz PWM頻率的電機控制應(yīng)用服務(wù)優(yōu)化的處理器來實現(xiàn)50 kHz至100 kHz PWM控制就有點難度了。
這種情況下,一種選擇是使用一個廉價的模擬PFC控制器(比如UC3854[3]),并使其完全獨立于主系統(tǒng)控制器工作。但是,使用一個數(shù)字PFC控制器(比如ADP1047[4])并搭配電機控制處理器和數(shù)字隔離器,便可實現(xiàn)增值。然后,處理器可將部分時序、監(jiān)控和保護功能交由PFC控制器負責,增強整體系統(tǒng)功能,同時降低成本。這種配置的好處如下:
● 啟動和關(guān)斷時序
● 系統(tǒng)級狀態(tài)信息
● 用戶界面顯示信息
● 異常條件監(jiān)控
● 最大程度降低傳感器要求
● 備份測量/冗余
● 用作整體系統(tǒng)故障保護的一部分
● 控制器優(yōu)化(通過效率)
圖2顯示了典型數(shù)字PFC控制器的系統(tǒng)監(jiān)控、保護和時序能力。將諸如ADP1047器件集成功能置于主處理器的控制與監(jiān)控之下,這樣做的優(yōu)勢從系統(tǒng)設(shè)計角度而言是非常明顯的??梢越档涂傁到y(tǒng)成本、復(fù)雜度并減少傳感器數(shù)量,哪怕PFC控制器自身的成本可能要高于其模擬器件。

圖2. 電機控制系統(tǒng)中的數(shù)字PFC控制器功能范圍。
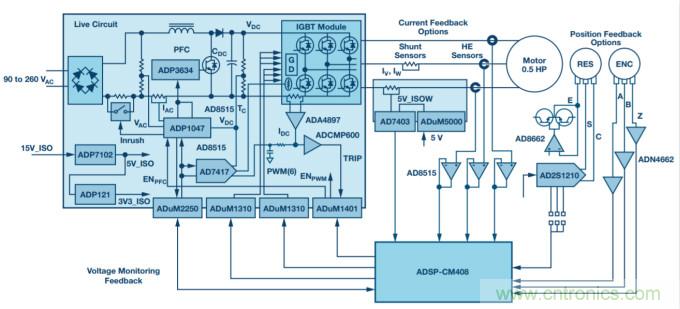
圖3. 通用交流輸入電機控制平臺。
硬件平臺
ADI提供實驗平臺,用來在真實電機控制系統(tǒng)中驗證信號鏈元件和軟件工具。 該平臺的電路架構(gòu)如圖3所示,平臺硬件如圖4所示。

圖4. 電機控制平臺硬件。
該系統(tǒng)表示一個功能完整的PMSM市電輸入電機驅(qū)動,具有功率因數(shù)校正、完全控制、通信信號隔離和光學(xué)編碼器反饋功能。該系統(tǒng)的核心是ARM®Cortex®-M4混合信號控制處理器,即ADI的ADSP-CM408。由ADP1047來執(zhí)行PFC前端控制,該器件集成精密輸入功率計量功能和浪涌電流控制。ADP1047設(shè)計用于單相PFC應(yīng)用,ADP1048則特別針對交錯式和無電橋PFC應(yīng)用而設(shè)計。數(shù)字PFC功能基于傳統(tǒng)的升壓PFC與輸出電壓反饋的乘法運算,并結(jié)合輸入電流和電壓來為AC/DC系統(tǒng)提供最佳的諧波校正和功率因數(shù)。所有信號都轉(zhuǎn)換到數(shù)字域以提供最大的靈活性,并且關(guān)鍵參數(shù)都可以通過PMBus接口提供報告和調(diào)整。ADP1047/ADP1048允許用戶優(yōu)化系統(tǒng)性能,最大程度地提高負載范圍內(nèi)的效率,并縮短設(shè)計上市時間。靈活的數(shù)控PFC引擎與精確的輸入功率計量功能的完美結(jié)合有利于智能電源管理系統(tǒng)的采用,從而利用其智能決策能力提高終端用戶的系統(tǒng)效率。在輕負載時,該器件支持以編程方式降低頻率,并能降低輸出電壓,從而進一步提高效率。ADP1047/ADP1048提供增強的集成特性和功能;浪涌電流和軟啟動控制功能的集成使元件數(shù)量顯著減少,并使優(yōu)化設(shè)計更輕松。該器件針對高可靠性、冗余電源應(yīng)用而設(shè)計,具有廣泛、魯棒的保護電路。它們還具備獨立過壓保護(OVP)和過流保護(OCP)、接地連續(xù)性監(jiān)控和交流檢測。同時提供內(nèi)部過溫保護(OTP),外部溫度則可以通過外部檢測器件記錄。
系統(tǒng)工作原理
通過I2C/PMBus接口實現(xiàn)處理器與PFC控制器的通信,I2C數(shù)字隔離器提供域之間的接口,如圖5所示。處理器位于SELV電氣域內(nèi),PFC控制器參考高壓域內(nèi)的直流總線通用電軌。三相逆變器的柵極驅(qū)動器開關(guān)信號通過雙通道隔離器,從處理器PWM模塊路由輸出。I2C接口的數(shù)據(jù)和時鐘信號以及通用數(shù)字信號同樣通過數(shù)字隔離器路由。
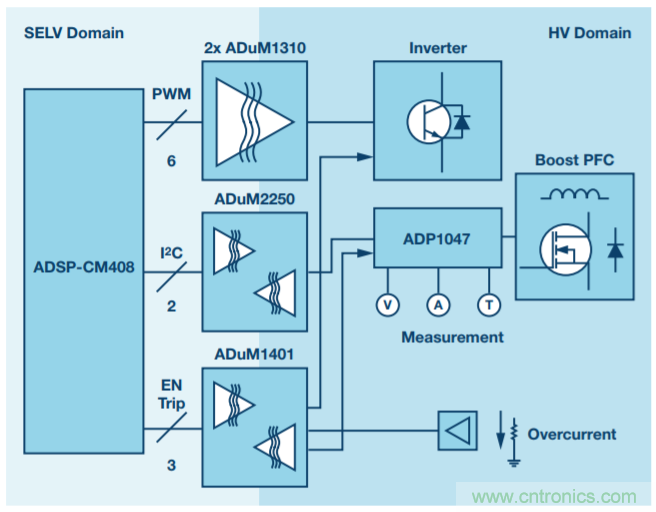
圖5. 數(shù)字信號隔離。
PFC控制器管理升壓PFC電路的控制和監(jiān)控。這些任務(wù)從主電機控制軟件的流程中分流至低優(yōu)先級的程序中,如圖6所示。PFC控制器參數(shù)在啟動期間配置。如果已有該功能,則通??梢酝ㄟ^將配置參數(shù)寫入控制器IC的EEPROM存儲器而跳過該步驟。如圖6所示,在典型電機控制系統(tǒng)中,速度和電流測量以及PWM控制器更新將作為高優(yōu)先級中斷處理,而電流測量與PWM信號同步。可設(shè)置PFC控制器以便處理輸入側(cè)測量,比如輸入交流線路電壓和電流、直流總線電壓、輸入功率、PFC電路溫度。這些測量對于電機控制算法而言不算關(guān)鍵,不過直流總線電壓測量對于無傳感器算法可能比較重要。但這些測量對于整體系統(tǒng)級監(jiān)控和控制器優(yōu)化而言比較重要。它們可以進而由低優(yōu)先級I2C數(shù)據(jù)處理任務(wù)或中斷例程請求和處理,并且計劃速率匹配系統(tǒng)監(jiān)控時間常數(shù)。
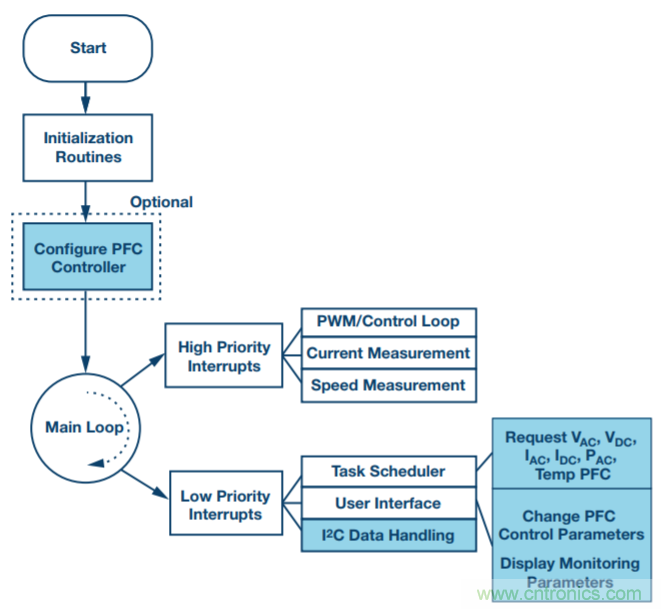
圖6. 主電機控制程序結(jié)構(gòu)。
圖7所示為平臺的Micrium Probe™用戶界面,其中直流總線基準電壓設(shè)為250 V??梢郧宄吹浇涣骱椭绷鱾?cè)的監(jiān)控變量以及電機控制。

圖7. 用戶界面。
結(jié)論
由此節(jié)省的額外傳感器、數(shù)字I/O和處理器上的模擬引腳,以及調(diào)節(jié)和解釋測量變量的軟件開銷可能意味著處理器成本的下降,只要選擇性能較低的變體,或者釋放處理器硬件和軟件空間供其他優(yōu)先級更高或系統(tǒng)增強型功能使用就可以實現(xiàn)。
本例中,相對于交流線路電壓的系統(tǒng)啟動序列,直流總線欠壓、過壓和交流側(cè)過流保護均通過PFC控制器實現(xiàn)。然而,必須謹慎地進行整體系統(tǒng)設(shè)計,因為主控制處理器應(yīng)始終由PFC控制器負責控制或保護,以便在受到副邊影響時不會獨立執(zhí)行操作。這種情況的一個例子便是PFC控制器由于直流總線瞬變過壓(比如因為電機制動事件)而經(jīng)歷了一次全局PWM信號禁用。如果控制器未能檢測到該事件,則它將試圖調(diào)節(jié)PWM輸出(不會成功)以保持工作點。如果PFC控制器在過壓瞬變消失后重新使能PWM,則系統(tǒng)可能會由于PWM占空比的突然大幅增加而出現(xiàn)副邊故障。因此,管理PFC控制器與電機控制處理器之間的保護通信和時序時必須非常仔細。
總之,若在較低成本的模擬PFC控制器與更為昂貴的數(shù)字控制器之間選擇,那么潛在的權(quán)衡取舍就應(yīng)當不僅根據(jù)PFC電路自身進行評估,還應(yīng)考慮數(shù)字控制器更強大的功能所帶來的潛在系統(tǒng)級功能、增強性和成本的下降。本文旨在強調(diào)部分關(guān)鍵系統(tǒng)級增強特性,使用ADP1047以及單相電機驅(qū)動系統(tǒng)作為示例。
參考文獻
[1] L. Rossetto, G. Spiazzi, 和 P. Tenti.“Control Techniques for Power Factor Correction Converters (功率因數(shù)校正轉(zhuǎn)換器的控制技術(shù))”。Proc. Int. Conf. Power Electron. Motion Control. Warsaw, Poland, 1994, pp.
[2] T. Friedli 和 J.W. Kolar.“The Essence of Three-Phase PFC Rectifier Systems (三相PFC整流器系統(tǒng)的本質(zhì))”。電信能源會議(INTELEC),2011 IEEE 33rd International, Vol., No., pp. 2011年10月。
[3] http://www.ti.com/product/uc3854
[4] http://www.analog.com/en/products/power-management/digital-powermanagement-ic/digital-pfc-controllers-power-metering/ADP1047.html
推薦閱讀:


