
【導(dǎo)讀】工業(yè)機(jī)器人由3大部分6個(gè)子系統(tǒng)組成。3大部分是機(jī)械部分、傳感部分和控制部分。6個(gè)子系統(tǒng)是驅(qū)動(dòng)系統(tǒng)、機(jī)械結(jié)構(gòu)系統(tǒng)、感受系統(tǒng)、機(jī)器人-環(huán)境交互系統(tǒng)、人機(jī)交互系統(tǒng)和控制系統(tǒng), 可用圖1.13來(lái)表示。
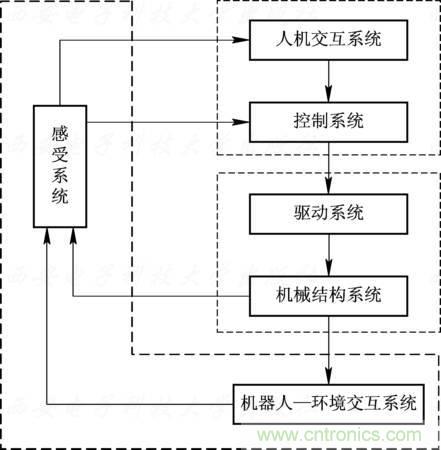
圖1.13 機(jī)器人系統(tǒng)組成
6個(gè)子系統(tǒng)的作用分述如下:
1. 驅(qū)動(dòng)系統(tǒng)
要使機(jī)器人運(yùn)行起來(lái), 需給各個(gè)關(guān)節(jié)即每個(gè)運(yùn)動(dòng)自由度安置傳動(dòng)裝置, 這就是驅(qū)動(dòng)系統(tǒng)。驅(qū)動(dòng)系統(tǒng)可以是液壓傳動(dòng)、氣動(dòng)傳動(dòng)、電動(dòng)傳動(dòng), 或者把它們結(jié)合起來(lái)應(yīng)用的綜合系統(tǒng); 可以是直接驅(qū)動(dòng)或者是通過同步帶、鏈條、輪系、諧波齒輪等機(jī)械傳動(dòng)機(jī)構(gòu)進(jìn)行間接驅(qū)動(dòng)。
2. 機(jī)械結(jié)構(gòu)系統(tǒng)
工業(yè)機(jī)器人的機(jī)械結(jié)構(gòu)系統(tǒng)由基座、手臂、末端操作器三大件組成, 如圖1.14所示。每一大件都有若干自由度, 構(gòu)成一個(gè)多自由度的機(jī)械系統(tǒng)。若基座具備行走機(jī)構(gòu), 則構(gòu)成行走機(jī)器人; 若基座不具備行走及腰轉(zhuǎn)機(jī)構(gòu), 則構(gòu)成單機(jī)器人臂(SingleRobotArm)。手臂一般由上臂、下臂和手腕組成。末端操作器是直接裝在手腕上的一個(gè)重要部件, 它可以是二手指或多手指的手爪, 也可以是噴漆槍、焊具等作業(yè)工具。
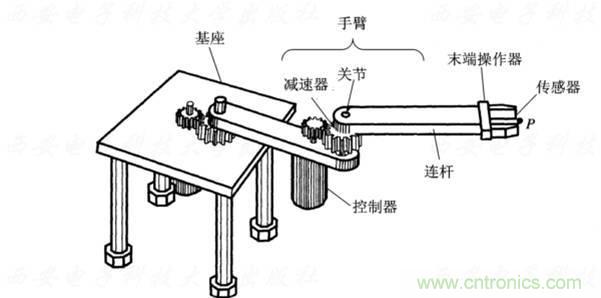
圖1.14 工業(yè)機(jī)器人的機(jī)械結(jié)構(gòu)系統(tǒng)
3. 感受系統(tǒng)
感受系統(tǒng)由內(nèi)部傳感器模塊和外部傳感器模塊組成, 用以獲取內(nèi)部和外部環(huán)境狀態(tài)中有意義的信息。智能傳感器的使用提高了機(jī)器人的機(jī)動(dòng)性、適應(yīng)性和智能化的水準(zhǔn)。人類的感受系統(tǒng)對(duì)感知外部世界信息是極其靈巧的, 然而,對(duì)于一些特殊的信息, 傳感器比人類的感受系統(tǒng)更有效。
4. 機(jī)器人-環(huán)境交互系統(tǒng)
機(jī)器人-環(huán)境交互系統(tǒng)是實(shí)現(xiàn)工業(yè)機(jī)器人與外部環(huán)境中的設(shè)備相互聯(lián)系和協(xié)調(diào)的系統(tǒng)。工業(yè)機(jī)器人與外部設(shè)備集成為一個(gè)功能單元, 如加工制造單元、焊接單元、裝配單元等。當(dāng)然, 也可以是多臺(tái)機(jī)器人、多臺(tái)機(jī)床或設(shè)備、多個(gè)零件存儲(chǔ)裝置等集成為一個(gè)去執(zhí)行復(fù)雜任務(wù)的功能單元。
5. 人機(jī)交互系統(tǒng)
人機(jī)交互系統(tǒng)是使操作人員參與機(jī)器人控制并與機(jī)器人進(jìn)行聯(lián)系的裝置,例如, 計(jì)算機(jī)的標(biāo)準(zhǔn)終端, 指令控制臺(tái), 信息顯示板, 危險(xiǎn)信號(hào)報(bào)警器等。該系統(tǒng)歸納起來(lái)分為兩大類: 指令給定裝置和信息顯示裝置。
6. 控制系統(tǒng)
控制系統(tǒng)的任務(wù)是根據(jù)機(jī)器人的作業(yè)指令程序以及從傳感器反饋回來(lái)的信號(hào)支配機(jī)器人的執(zhí)行機(jī)構(gòu)去完成規(guī)定的運(yùn)動(dòng)和功能。假如工業(yè)機(jī)器人不具備信息反饋特征, 則為開環(huán)控制系統(tǒng);若具備信息反饋特征, 則為閉環(huán)控制系統(tǒng)。根據(jù)控制原理,控制系統(tǒng)可分為程序控制系統(tǒng)、適應(yīng)性控制系統(tǒng)和人工智能控制系統(tǒng)。根據(jù)控制運(yùn)動(dòng)的形式,控制系統(tǒng)可分為點(diǎn)位控制和軌跡控制。
圖1.15為三菱裝配機(jī)器人系統(tǒng)的基本構(gòu)成。該機(jī)器人由機(jī)器人主體、控制器、示教盒和PC機(jī)構(gòu)成??捎檬窘痰姆绞胶陀肞C機(jī)編程的方式來(lái)控制機(jī)器人的動(dòng)作。
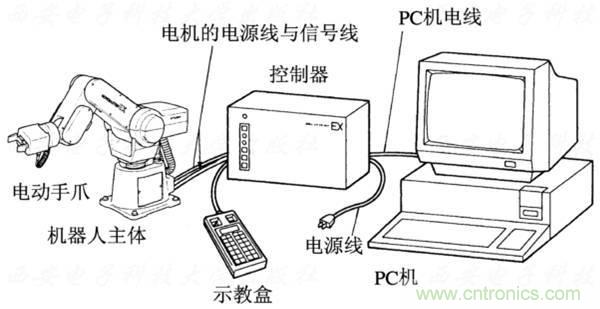
圖1.15 三菱裝配機(jī)器人系統(tǒng)
工業(yè)機(jī)器人的技術(shù)參數(shù)
工業(yè)機(jī)器人的技術(shù)參數(shù)是各工業(yè)機(jī)器人制造商在產(chǎn)品供貨時(shí)所提供的技術(shù)數(shù)據(jù)。表1.2和表1.3為兩種工業(yè)機(jī)器人的主要技術(shù)參數(shù)。盡管各廠商提供的技術(shù)參數(shù)不完全一樣, 工業(yè)機(jī)器人的結(jié)構(gòu)、用途等有所不同, 且用戶的要求也不同, 但工業(yè)機(jī)器人的主要技術(shù)參數(shù)一般應(yīng)有自由度、重復(fù)定位精度、工作范圍、最大工作速度和承載能力等。
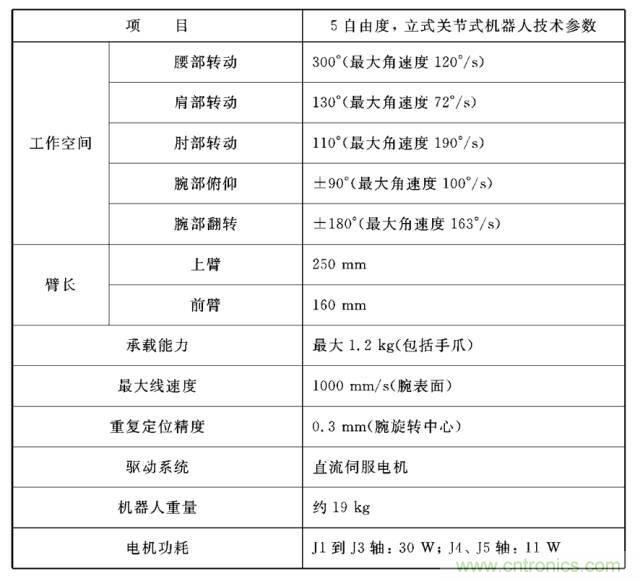
表1.2 三菱裝配機(jī)器人Movemaster EX RV-M1的主要技術(shù)參數(shù)
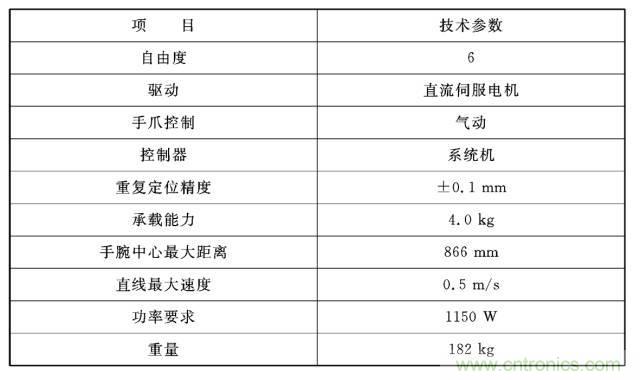
表1.3 PUMA 562機(jī)器人的主要技術(shù)參數(shù)
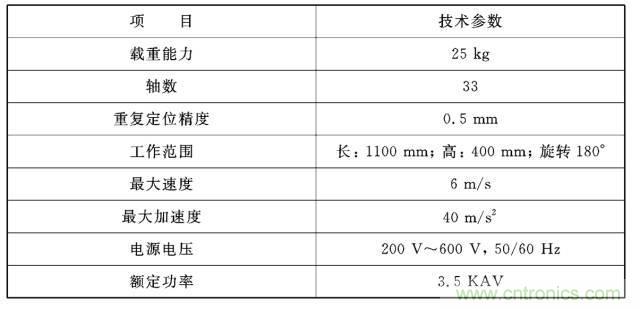
表1.4 BR-210 并聯(lián)機(jī)器人的主要技術(shù)參數(shù)
1. 自由度(Degrees of Freedom)
自由度是指機(jī)器人所具有的獨(dú)立坐標(biāo)軸運(yùn)動(dòng)的數(shù)目,不應(yīng)包括手爪(末端操作器)的開合自由度。在三維空間中描述一個(gè)物體的位置和姿態(tài)(簡(jiǎn)稱位姿)需要六個(gè)自由度。但是, 工業(yè)機(jī)器人的自由度是根據(jù)其用途而設(shè)計(jì)的, 可能小于六個(gè)自由度, 也可能大于六個(gè)自由度。例如, A4020裝配機(jī)器人具有四個(gè)自由度, 可以在印刷電路板上接插電子器件; PUMA 562機(jī)器人具有六個(gè)自由度, 如圖1.16所示,可以進(jìn)行復(fù)雜空間曲面的弧焊作業(yè)。從運(yùn)動(dòng)學(xué)的觀點(diǎn)看, 在完成某一特定作業(yè)時(shí)具有多余自由度的機(jī)器人, 就叫做冗余自由度機(jī)器人。例如, PUMA 562機(jī)器人去執(zhí)行印刷電路板上接插電子器件的作業(yè)時(shí)就成為冗余自由度機(jī)器人。利用冗余自由度可以增加機(jī)器人的靈活性、躲避障礙物和改善動(dòng)力性能。人的手臂(大臂、小臂、手腕)共有七個(gè)自由度, 所以工作起來(lái)很靈巧,手部可回避障礙而從不同方向到達(dá)同一個(gè)目的點(diǎn)。
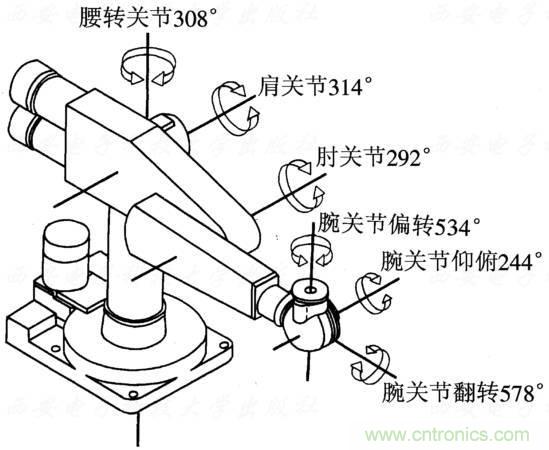
圖1.16 PUMA 562工業(yè)機(jī)器人
2. 定位精度(Positioning Accuracy)
工業(yè)機(jī)器人精度是指定位精度和重復(fù)定位精度。定位精度是指機(jī)器人手部實(shí)際到達(dá)位置與目標(biāo)位置之間的差異。重復(fù)定位精度是指機(jī)器人重復(fù)定位其手部于同一目標(biāo)位置的能力, 可以用標(biāo)準(zhǔn)偏差這個(gè)統(tǒng)計(jì)量來(lái)表示, 它是衡量一列誤差值的密集度(即重復(fù)度), 如圖1.17所示。
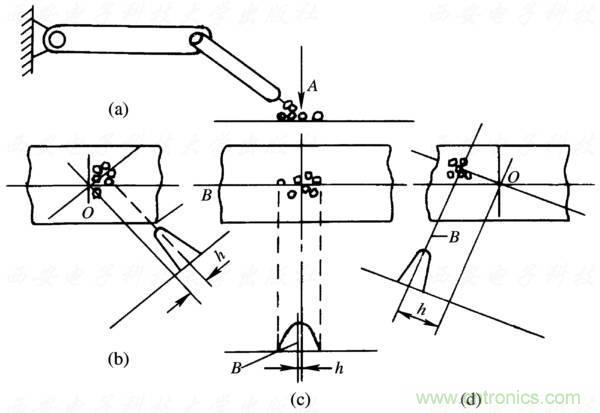
圖1.17 工業(yè)機(jī)器人定位精度和重復(fù)定位精度的典型情況
(a) 重復(fù)定位精度的測(cè)量;(b) 合理定位精度,良好重復(fù)定位精度;
(c) 良好定位精度, 很差重復(fù)定位精度;(d) 很差定位精度,良好重復(fù)定位精度
3. 工作范圍(Work Space)
工作范圍是指機(jī)器人手臂末端或手腕中心所能到達(dá)的所有點(diǎn)的集合, 也叫工作區(qū)域。因?yàn)槟┒瞬僮髌鞯某叽绾托螤钍嵌喾N多樣的, 為了真實(shí)反映機(jī)器人的特征參數(shù), 所以, 這里是指不安裝末端操作器時(shí)的工作區(qū)域。工作范圍的形狀和大小是十分重要的, 機(jī)器人在執(zhí)行作業(yè)時(shí)可能會(huì)因?yàn)榇嬖谑植坎荒艿竭_(dá)的作業(yè)死區(qū)(Dead Zone)而不能完成任務(wù)。圖1.18 和圖1.19所示分別為PUMA機(jī)器人和A4020機(jī)器人的工作范圍。
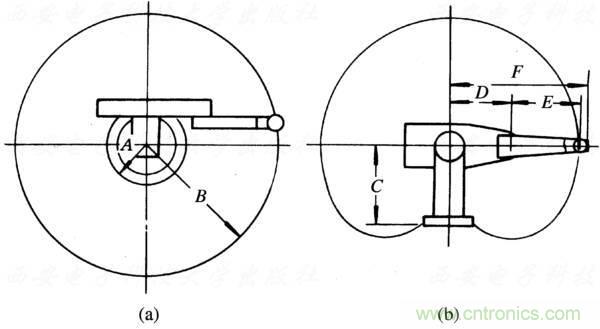
圖1.18 PUMA機(jī)器人工作范圍
(a) 頂視圖; (b) 側(cè)視圖
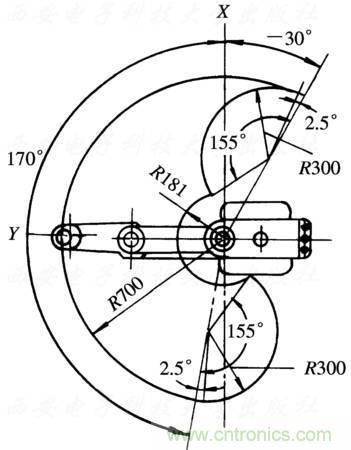
圖1.19 A4020型SCARA機(jī)器人工作范圍
4. 速度(Speed)和加速度
速度和加速度是表明機(jī)器人運(yùn)動(dòng)特性的主要指標(biāo)。說(shuō)明書中通常提供了主要運(yùn)動(dòng)自由度的最大穩(wěn)定速度,但在實(shí)際應(yīng)用中單純考慮最大穩(wěn)定速度是不夠的。這是因?yàn)?由于驅(qū)動(dòng)器輸出功率的限制,從啟動(dòng)到達(dá)最大穩(wěn)定速度或從最大穩(wěn)定速度到停止, 都需要一定時(shí)間。如果最大穩(wěn)定速度高, 允許的極限加速度小, 則加減速的時(shí)間就會(huì)長(zhǎng)一些,對(duì)應(yīng)用而言的有效速度就要低一些; 反之, 如果最大穩(wěn)定速度低,允許的極限加速度大, 則加減速的時(shí)間就會(huì)短一些, 這有利于有效速度的提高。但如果加速或減速過快, 有可能引起定位時(shí)超調(diào)或振蕩加劇, 使得到達(dá)目標(biāo)位置后需要等待振蕩衰減的時(shí)間增加, 則也可能使有效速度反而降低。所以, 考慮機(jī)器人運(yùn)動(dòng)特性時(shí), 除注意最大穩(wěn)定速度外, 還應(yīng)注意其最大允許的加減速度。
5. 承載能力(Payload)
承載能力是指機(jī)器人在工作范圍內(nèi)的任何位姿上所能承受的最大質(zhì)量。承載能力不僅決定于負(fù)載的質(zhì)量, 而且還與機(jī)器人運(yùn)行的速度和加速度的大小和方向有關(guān)。為了安全起見, 承載能力這一技術(shù)指標(biāo)是指高速運(yùn)行時(shí)的承載能力。通常, 承載能力不僅指負(fù)載, 而且還包括了機(jī)器人末端操作器的質(zhì)量。
機(jī)器人有效負(fù)載的大小除受到驅(qū)動(dòng)器功率的限制外, 還受到桿件材料極限應(yīng)力的限制, 因而它又和環(huán)境條件(如地心引力)、運(yùn)動(dòng)參數(shù)(如運(yùn)動(dòng)速度、加速度以及它們的方向)有關(guān)。如加拿大手臂,它的額定可搬運(yùn)質(zhì)量為15 000 kg, 在運(yùn)動(dòng)速度較低時(shí)能達(dá)到30 000 kg。然而,這種負(fù)荷能力只是在太空中失重條件下才有可能達(dá)到,在地球上, 該手臂本身的重量達(dá)450 kg, 它連自重引起的臂桿變形都無(wú)法承受, 更談不上搬運(yùn)質(zhì)量了。
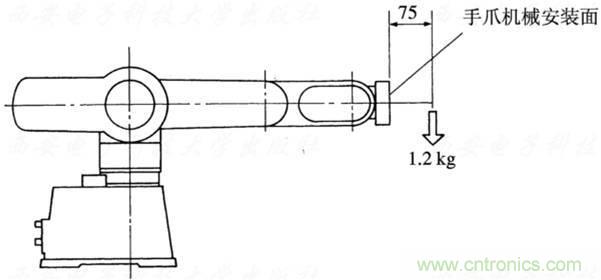
圖1.20三菱裝配機(jī)器人不帶電動(dòng)手爪時(shí)的承載能力
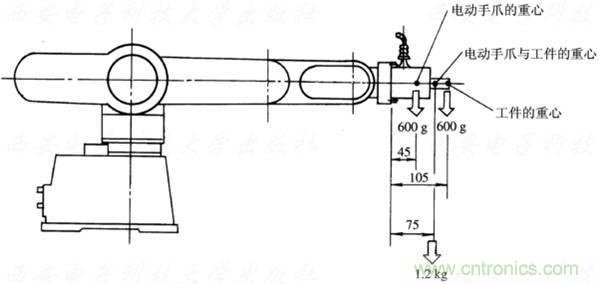
圖1.21三菱裝配機(jī)器人帶電動(dòng)手爪時(shí)的承載能力
1.3.3 工業(yè)機(jī)器人的坐標(biāo)
如圖1.22所示, 工業(yè)機(jī)器人的坐標(biāo)形式有直角坐標(biāo)型、圓柱坐標(biāo)型、球坐標(biāo)型、關(guān)節(jié)坐標(biāo)型和平面關(guān)節(jié)型。

圖1.22 工業(yè)機(jī)器人的幾種坐標(biāo)形式
1. 直角坐標(biāo)/笛卡兒坐標(biāo)/臺(tái)架型(3P)
這種機(jī)器人由3個(gè)線性關(guān)節(jié)組成, 這3個(gè)關(guān)節(jié)用來(lái)確定末端操作器的位置, 通常還帶有附加的旋轉(zhuǎn)關(guān)節(jié),用來(lái)確定末端操作器的姿態(tài)。這種機(jī)器人在x、y、z軸上的運(yùn)動(dòng)是獨(dú)立的, 運(yùn)動(dòng)方程可獨(dú)立處理, 且方程是線性的, 因此很容易通過計(jì)算機(jī)控制實(shí)現(xiàn); 它可以兩端支撐, 對(duì)于給定的結(jié)構(gòu)長(zhǎng)度,剛性最大; 它的精度和位置分辨率不隨工作場(chǎng)合而變化, 容易達(dá)到高精度。但是, 它的操作范圍小,手臂收縮的同時(shí)又向相反的方向伸出, 既妨礙工作, 又占地面積大, 運(yùn)動(dòng)速度低, 密封性不好。
圖1.23虛線所示為直角坐標(biāo)機(jī)器人的工作空間示意圖,它是一個(gè)立方體形狀。
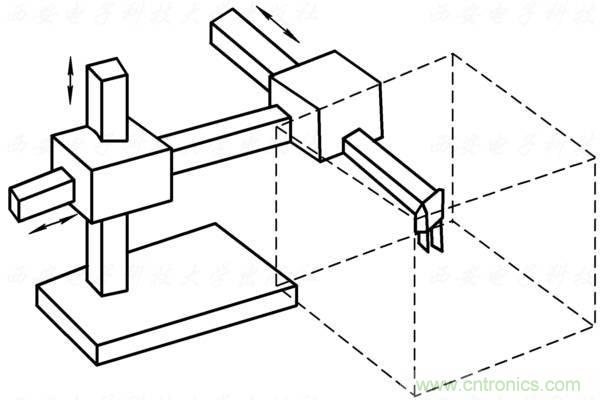
圖1.23 直角坐標(biāo)機(jī)器人的工作空間示意圖
2. 圓柱坐標(biāo)型(R2P)
圓柱坐標(biāo)機(jī)器人由兩個(gè)滑動(dòng)關(guān)節(jié)和一個(gè)旋轉(zhuǎn)關(guān)節(jié)來(lái)確定部件的位置, 再附加一個(gè)旋轉(zhuǎn)關(guān)節(jié)來(lái)確定部件的姿態(tài)。這種機(jī)器人可以繞中心軸旋轉(zhuǎn)一個(gè)角,工作范圍可以擴(kuò)大,且計(jì)算簡(jiǎn)單; 直線部分可采用液壓驅(qū)動(dòng),可輸出較大的動(dòng)力; 能夠伸入型腔式機(jī)器內(nèi)部。但是,它的手臂可以到達(dá)的空間受到限制, 不能到達(dá)近立柱或近地面的空間; 直線驅(qū)動(dòng)部分難以密封、防塵; 后臂工作時(shí), 手臂后端會(huì)碰到工作范圍內(nèi)的其它物體。圓柱坐標(biāo)機(jī)器人的工作范圍呈圓柱形狀, 如圖1.24所示。
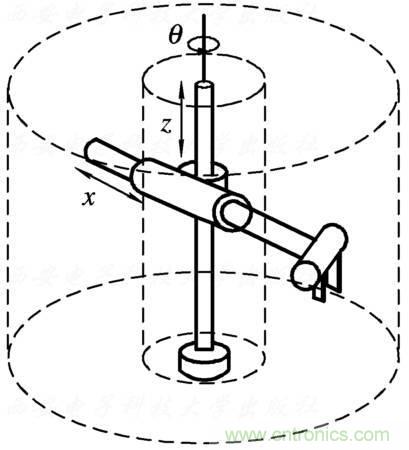
圖1.24 圓柱坐標(biāo)機(jī)器人的工作范圍
3. 球坐標(biāo)型(2RP)
球坐標(biāo)機(jī)器人采用球坐標(biāo)系, 它用一個(gè)滑動(dòng)關(guān)節(jié)和兩個(gè)旋轉(zhuǎn)關(guān)節(jié)來(lái)確定部件的位置, 再用一個(gè)附加的旋轉(zhuǎn)關(guān)節(jié)確定部件的姿態(tài)。這種機(jī)器人可以繞中心軸旋轉(zhuǎn), 中心支架附近的工作范圍大,兩個(gè)轉(zhuǎn)動(dòng)驅(qū)動(dòng)裝置容易密封, 覆蓋工作空間較大。但該坐標(biāo)復(fù)雜, 難于控制, 且直線驅(qū)動(dòng)裝置仍存在密封及工作死區(qū)的問題。球坐標(biāo)機(jī)器人的工作范圍呈球缺狀, 如圖1.25所示。
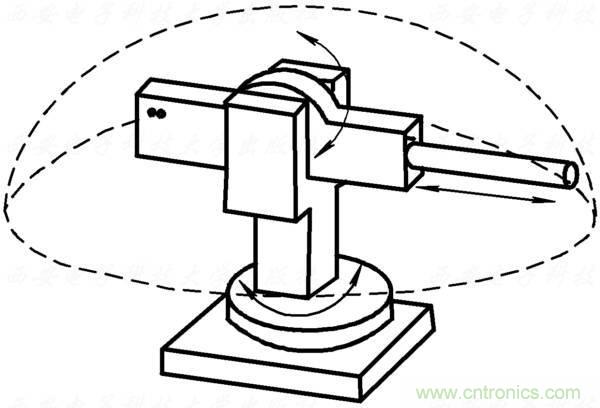
圖1.25 球坐標(biāo)機(jī)器人的工作范圍
4. 關(guān)節(jié)坐標(biāo)型/擬人型(3R)
關(guān)節(jié)機(jī)器人的關(guān)節(jié)全都是旋轉(zhuǎn)的, 類似于人的手臂, 是工業(yè)機(jī)器人中最常見的結(jié)構(gòu)。它的工作范圍較為復(fù)雜, 圖1.18所示為PUMA機(jī)器人的工作范圍。
5. 平面關(guān)節(jié)型
這種機(jī)器人可看做是關(guān)節(jié)坐標(biāo)式機(jī)器人的特例, 它只有平行的肩關(guān)節(jié)和肘關(guān)節(jié),關(guān)節(jié)軸線共面。如SCARA(Selective Compliance Assembly Robot Arm)機(jī)器人有兩個(gè)并聯(lián)的旋轉(zhuǎn)關(guān)節(jié), 可以使機(jī)器人在水平面上運(yùn)動(dòng), 此外, 再用一個(gè)附加的滑動(dòng)關(guān)節(jié)做垂直運(yùn)動(dòng)。SCARA機(jī)器人常用于裝配作業(yè), 最顯著的特點(diǎn)是它們?cè)趚-y平面上的運(yùn)動(dòng)具有較大的柔性, 而沿z軸具有很強(qiáng)的剛性, 所以, 它具有選擇性的柔性。這種機(jī)器人在裝配作業(yè)中獲得了較好的應(yīng)用。平面關(guān)節(jié)機(jī)器人的工作空間如圖1.26所示。
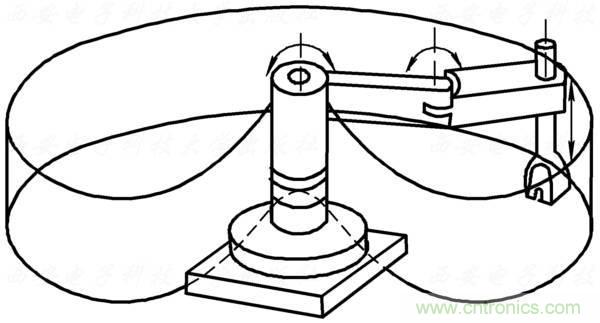
圖1.26 平面關(guān)節(jié)機(jī)器人的工作空間
1.3.4 工業(yè)機(jī)器人的參考坐標(biāo)系
機(jī)器人可以相對(duì)于不同的坐標(biāo)系運(yùn)動(dòng), 在每一種坐標(biāo)系中的運(yùn)動(dòng)都不相同。通常, 機(jī)器人的運(yùn)動(dòng)在以下三種坐標(biāo)系中完成(如圖1.27所示)。
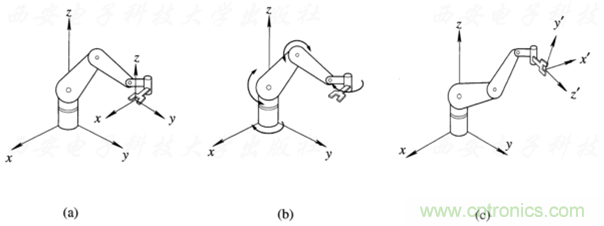
圖1.27 機(jī)器人的參考坐標(biāo)系
(a) 全局參考坐標(biāo)系; (b) 關(guān)節(jié)參考坐標(biāo)系; (c) 工具參考坐標(biāo)系
1. 全局參考坐標(biāo)系
全局參考坐標(biāo)系是一種通用坐標(biāo)系, 由x、y和z軸所定義。在此情況下, 通過機(jī)器人各關(guān)節(jié)的同時(shí)運(yùn)動(dòng)來(lái)產(chǎn)生沿三個(gè)主軸方向的運(yùn)動(dòng)。在這種坐標(biāo)系中, 無(wú)論手臂在哪里,x軸的正向運(yùn)動(dòng)就總是在x軸的正方向。這一坐標(biāo)系通常用來(lái)定義機(jī)器人相對(duì)于其他物體的運(yùn)動(dòng)、與機(jī)器人通信的其他部件以及運(yùn)動(dòng)路徑。
2. 關(guān)節(jié)參考坐標(biāo)系
關(guān)節(jié)參考坐標(biāo)系用來(lái)描述機(jī)器人每一個(gè)獨(dú)立關(guān)節(jié)的運(yùn)動(dòng)。假設(shè)希望將機(jī)器人的手運(yùn)動(dòng)到一個(gè)特定的位置, 可以每次只運(yùn)動(dòng)一個(gè)關(guān)節(jié), 從而把手引導(dǎo)到期望的位置上。在這種情況下, 每一個(gè)關(guān)節(jié)單獨(dú)控制, 從而每次只有一個(gè)關(guān)節(jié)運(yùn)動(dòng)。由于所用關(guān)節(jié)的類型(移動(dòng)、旋轉(zhuǎn)型)不同, 因此,機(jī)器人手的動(dòng)作也各不相同。例如, 如果為旋轉(zhuǎn)關(guān)節(jié)運(yùn)動(dòng), 則機(jī)器人手將繞著關(guān)節(jié)的軸旋轉(zhuǎn)。
3. 工具參考坐標(biāo)系
工具參考坐標(biāo)系描述機(jī)器人手相對(duì)于固連在手上的坐標(biāo)系的運(yùn)動(dòng)。固連在手上的x′、y′和z′軸定義了手相對(duì)于本地坐標(biāo)系的運(yùn)動(dòng)。與通用的全局參考坐標(biāo)系不同, 本地的工具參考坐標(biāo)系隨機(jī)器人一起運(yùn)動(dòng)。假設(shè)機(jī)器人手的指向如圖1.27所示, 相對(duì)于本地的工具參考坐標(biāo)系x′軸的正向運(yùn)動(dòng)意味著機(jī)器人手沿工具參考坐標(biāo)系x′軸方向運(yùn)動(dòng)。如果機(jī)器人的手指向別處, 那么同樣沿著工具參考坐標(biāo)系x′軸的運(yùn)動(dòng)將完全不同于前面的運(yùn)動(dòng)。如果x′軸指向上, 那么沿+x′軸的運(yùn)動(dòng)便是向上的; 反之, 如果x′軸指向下,那么沿+x′軸的運(yùn)動(dòng)便是向下的。
1.3.5 并聯(lián)機(jī)器人
并聯(lián)機(jī)器人又稱并聯(lián)機(jī)構(gòu)(PM, Parallel Mechanism),一般結(jié)構(gòu)如圖1.28所示。并聯(lián)機(jī)器人可以定義為動(dòng)平臺(tái)和定平臺(tái)兩種形式, 二者通過至少兩個(gè)獨(dú)立的運(yùn)動(dòng)鏈相連接,機(jī)構(gòu)具有兩個(gè)或兩個(gè)以上自由度,且以并聯(lián)方式驅(qū)動(dòng)的一種閉環(huán)機(jī)構(gòu)。
這種機(jī)器人有以下幾個(gè)特點(diǎn):
(1) 無(wú)累積誤差,精度較高;
(2) 驅(qū)動(dòng)裝置可置于定平臺(tái)上或接近定平臺(tái)的位置,這樣運(yùn)動(dòng)部分重量輕,速度高,動(dòng)態(tài)響應(yīng)好;
(3) 結(jié)構(gòu)緊湊,剛度高,承載能力大;
(4) 完全對(duì)稱的并聯(lián)機(jī)構(gòu)具有較好的各向同性;
(5) 工作空間較小。
因?yàn)檫@些特點(diǎn),并聯(lián)機(jī)器人在需要高剛度、高精度或者大載荷而無(wú)需很大工作空間的領(lǐng)域內(nèi)得到了廣泛應(yīng)用,主要應(yīng)用于以下幾個(gè)方面:
(1) 運(yùn)動(dòng)模擬器。并聯(lián)機(jī)器人用作運(yùn)動(dòng)模擬器如圖1.29所示。

圖1.28 并聯(lián)機(jī)器人結(jié)構(gòu)
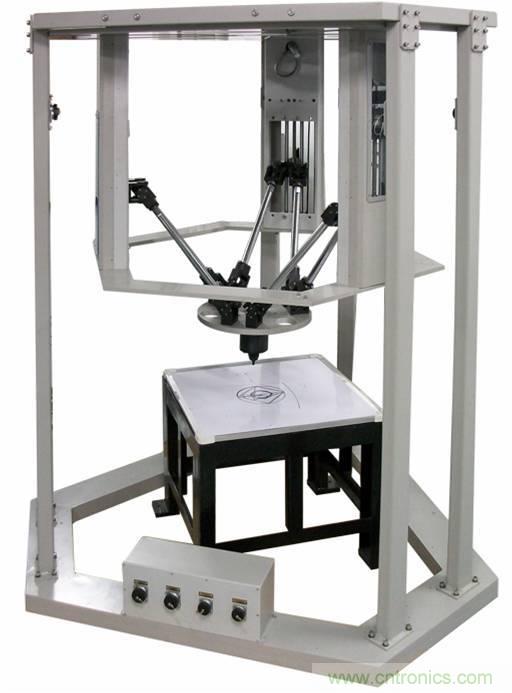
圖 1.29 并聯(lián)機(jī)器人
(2) 并聯(lián)機(jī)床。
并聯(lián)機(jī)床具有承載能力強(qiáng)、響應(yīng)速度快、精度高、機(jī)械結(jié)構(gòu)簡(jiǎn)單、適應(yīng)性好等優(yōu)點(diǎn),是一種“硬件” 簡(jiǎn)單、“軟件”復(fù)雜、 技術(shù)附加值高的產(chǎn)品。 并聯(lián)機(jī)床如圖1.30所示。

圖 1.30 并聯(lián)機(jī)床
(3) 微操作機(jī)器人。
微操作機(jī)器人如圖1.31所示, 經(jīng)常用于安裝印刷電路板上的電子元件。

圖 1.31 微操作機(jī)器人
并聯(lián)機(jī)器人可按并聯(lián)機(jī)構(gòu)的自由度數(shù)分類:
(1) 2 自由度并聯(lián)機(jī)構(gòu)。 2 自由度并聯(lián)機(jī)構(gòu), 如5-R、 3-R、 2-P平面5桿機(jī)構(gòu)是最典型的2自由度并聯(lián)機(jī)構(gòu), 這類機(jī)構(gòu)一般具有2 個(gè)移動(dòng)運(yùn)動(dòng)。
(2) 3 自由度并聯(lián)機(jī)構(gòu)。 3 自由度并聯(lián)機(jī)構(gòu)種類較多, 形式較復(fù)雜,一般有以下幾個(gè)形式: 平面3自由度并聯(lián)機(jī)構(gòu), 如3-RPR 機(jī)構(gòu),它們具有2個(gè)轉(zhuǎn)動(dòng)和1個(gè)移動(dòng); 球面3自由度并聯(lián)機(jī)構(gòu), 如3-RRR 球面機(jī)構(gòu)、 3-UPS-1-S 球面機(jī)構(gòu),3-RRR 球面機(jī)構(gòu)所有運(yùn)動(dòng)副的軸線匯交空間一點(diǎn),這點(diǎn)稱為機(jī)構(gòu)的中心, 而3-UPS-1-S 球面機(jī)構(gòu)則以S的中心點(diǎn)為機(jī)構(gòu)的中心,機(jī)構(gòu)上的所有點(diǎn)的運(yùn)動(dòng)都是繞該點(diǎn)的轉(zhuǎn)動(dòng)運(yùn)動(dòng); 3 維純移動(dòng)機(jī)構(gòu), 如Star Like 并聯(lián)機(jī)構(gòu)、 Tsai 并聯(lián)機(jī)構(gòu)和DELTA 機(jī)構(gòu),該類機(jī)構(gòu)的運(yùn)動(dòng)學(xué)正反解都很簡(jiǎn)單, 是一種應(yīng)用很廣泛的3維移動(dòng)空間機(jī)構(gòu)。空間3自由度并聯(lián)機(jī)構(gòu),如典型的3-RPS 機(jī)構(gòu),這類機(jī)構(gòu)屬于欠秩機(jī)構(gòu), 在工作空間內(nèi)不同的點(diǎn)的運(yùn)動(dòng)形式不同是其最顯著的特點(diǎn), 由于這種特殊的運(yùn)動(dòng)特性,阻礙了該類機(jī)構(gòu)在實(shí)際中的廣泛應(yīng)用; 還有一類是增加輔助桿件和運(yùn)動(dòng)副的空間機(jī)構(gòu), 如德國(guó)漢諾威大學(xué)研制的并聯(lián)機(jī)床采用的3-UPS-1-PU 球坐標(biāo)式3 自由度并聯(lián)機(jī)構(gòu), 由于輔助桿件和運(yùn)動(dòng)副的制約, 使得該機(jī)構(gòu)的運(yùn)動(dòng)平臺(tái)具有1 個(gè)移動(dòng)和2 個(gè)轉(zhuǎn)動(dòng)的運(yùn)動(dòng)(也可以說(shuō)是3個(gè)移動(dòng)運(yùn)動(dòng))。
(3) 4 自由度并聯(lián)機(jī)構(gòu)。 4 自由度并聯(lián)機(jī)構(gòu)大多不是完全并聯(lián)機(jī)構(gòu), 如2-UPS-1-RRRR 機(jī)構(gòu), 運(yùn)動(dòng)平臺(tái)通過3 個(gè)支鏈與定平臺(tái)相連, 有2個(gè)運(yùn)動(dòng)鏈?zhǔn)窍嗤模?各具有1 個(gè)虎克鉸U , 1 個(gè)移動(dòng)副P , 其中P 和1 個(gè)R 是驅(qū)動(dòng)副, 因此這種機(jī)構(gòu)不是完全并聯(lián)機(jī)構(gòu)。
(4) 5 自由度并聯(lián)機(jī)構(gòu)。 現(xiàn)有的5 自由度并聯(lián)機(jī)構(gòu)結(jié)構(gòu)復(fù)雜, 如韓國(guó)Lee的5自由度并聯(lián)機(jī)構(gòu)具有雙層結(jié)構(gòu)(2 個(gè)并聯(lián)機(jī)構(gòu)的結(jié)合)。
(5) 6 自由度并聯(lián)機(jī)構(gòu)。 6 自由度并聯(lián)機(jī)構(gòu)是并聯(lián)機(jī)器人機(jī)構(gòu)中的一大類, 是國(guó)內(nèi)外學(xué)者研究得最多的并聯(lián)機(jī)構(gòu),廣泛應(yīng)用在飛行模擬器、 6維力與力矩傳感器和并聯(lián)機(jī)床等領(lǐng)域。 但這類機(jī)構(gòu)有很多關(guān)鍵性技術(shù)沒有或沒有完全得到解決,比如其運(yùn)動(dòng)學(xué)正解、 動(dòng)力學(xué)模型的建立以及并聯(lián)機(jī)床的精度標(biāo)定等。 從完全并聯(lián)的角度出發(fā), 這類機(jī)構(gòu)必須具有6個(gè)運(yùn)動(dòng)鏈。但現(xiàn)有的并聯(lián)機(jī)構(gòu)中, 也有擁有3 個(gè)運(yùn)動(dòng)鏈的6 自由度并聯(lián)機(jī)構(gòu),如3-PRPS 和3-URS 等機(jī)構(gòu), 還有在3 個(gè)分支的每個(gè)分支上附加1個(gè)5桿機(jī)構(gòu)作驅(qū)動(dòng)機(jī)構(gòu)的6自由度并聯(lián)機(jī)構(gòu)等。
1.3.6工業(yè)機(jī)器人的機(jī)構(gòu)表示方式
為了簡(jiǎn)化機(jī)器人機(jī)構(gòu)的表達(dá)過程, 常用特定的圖形符號(hào)來(lái)表示機(jī)器人的各種機(jī)構(gòu)運(yùn)動(dòng)副, 常用的工業(yè)機(jī)器人的各種圖形符號(hào)如表1.5所示。
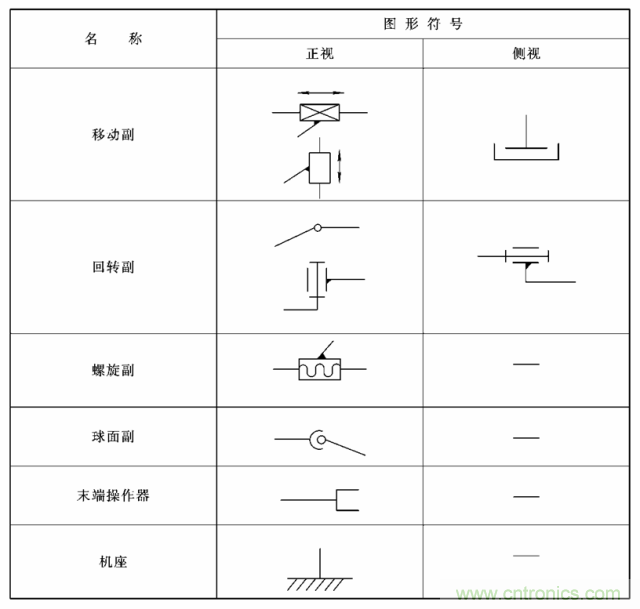
表1.5 工業(yè)機(jī)器人的各種圖形符號(hào)
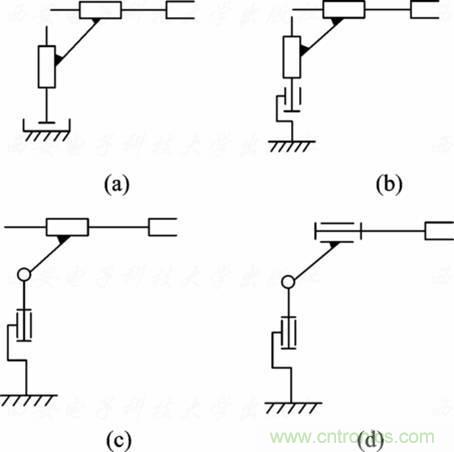
圖 1.32 幾種常用坐標(biāo)型機(jī)器人機(jī)構(gòu)簡(jiǎn)圖
(a) 直角坐標(biāo)型; (b) 圓柱坐標(biāo)型; (c) 球坐標(biāo)型; (d) 關(guān)節(jié)坐標(biāo)型
推薦閱讀:


