

【導讀】旋轉(zhuǎn)變壓器是機械或模擬傳感器,可用來確定電機的絕對位置和速度。旋轉(zhuǎn)變壓器傳感器可應(yīng)用于惡劣的環(huán)境,幫助獲得精確的角位置和速度數(shù)據(jù)。該類傳感器常用于工業(yè),汽車和航空行業(yè)——特別是在電機或傳感器可能會被污染的惡劣環(huán)境中。
常見的污染物包括:油、污垢、食物顆粒,甚至是可能導致其他旋轉(zhuǎn)感測技術(shù)無法實施的極端溫度。特定的最終產(chǎn)品具有獨特的設(shè)計挑戰(zhàn)和要求,其中一些挑戰(zhàn)和要求常見于大多數(shù)工業(yè)應(yīng)用。其中兩個挑戰(zhàn)是:1)角位置和速度數(shù)據(jù)的絕對精度;2)最小化或消除電磁干擾(EMI)。
旋轉(zhuǎn)變壓器傳感器的工業(yè)應(yīng)用
一些絕對旋轉(zhuǎn)傳感技術(shù)(如光編碼器)被多次選用于工業(yè)應(yīng)用。然而, 當應(yīng)付惡劣環(huán)境或出于低成本考慮時,旋轉(zhuǎn)變壓器是理想的選擇。伺服電機常用于工業(yè)領(lǐng)域,與旋轉(zhuǎn)變壓器以及其他類型的位置傳感器相連接。通常使用伺服電機和伺服驅(qū)動器與旋轉(zhuǎn)變壓器配合來實現(xiàn)角速度與位置測量的應(yīng)用包括:
數(shù)控(CNC)和注塑機、升降機、機械手臂、電動交通工具(電動自行車、電動滑板車、電動輪椅等)、鐵路運輸、農(nóng)業(yè)和建筑設(shè)備、公共汽車和重型卡車、高爾夫球車和低速電動車。
主要的旋轉(zhuǎn)變壓器傳感系統(tǒng)要求
精確和及時的旋轉(zhuǎn)變壓器角度輸出
在找到利用旋轉(zhuǎn)變壓器來減輕電磁干擾對工業(yè)系統(tǒng)的影響的方法之前,重要的是要先理解為什么精確的位置控制是必不可少的。旋轉(zhuǎn)變壓器提供一個理論上與無限解析度一樣的模擬輸出。模擬到數(shù)字的轉(zhuǎn)換技術(shù),通過將輸出分割成塊或步驟的程度來限制解析度。對持續(xù)角進行有限分割將導致定量錯誤。例如,您可以使用一個12位分辨率的轉(zhuǎn)換器來提供角輸出。轉(zhuǎn)換器軸旋轉(zhuǎn)一圈被分為4096步(2^12對應(yīng)一個12位分辨率)。由于一度等于60分,所以旋轉(zhuǎn)一圈(360度)等于21600角分(60x360)。則每步的間隔為5.27角分(21600/4096)。系統(tǒng)不可能提供比5.27角分更好的信息。
決定正確角位置的兩個關(guān)鍵點是系統(tǒng)精度和系統(tǒng)穩(wěn)定時間。后者主要指的是角輸出要花多久才能顯示出精確位置。需要對系統(tǒng)的每個部件進行評價,以確定限制因素。系統(tǒng)中,典型的誤差精度是旋轉(zhuǎn)變壓器誤差和旋轉(zhuǎn)變壓器模擬數(shù)字轉(zhuǎn)換(RDC’s)誤差的總和。最常見的是,3-10角分就會出現(xiàn)一個旋轉(zhuǎn)變壓器誤差。再加上5.27角分會出現(xiàn)旋轉(zhuǎn)變壓器模擬數(shù)字轉(zhuǎn)換誤差,則我們可以得出精確的誤差出現(xiàn)范圍是8.27-15.27角分。因此,選擇正確的RDC很重要。以下因素在典型的旋轉(zhuǎn)變壓器應(yīng)用中會對系統(tǒng)精度和穩(wěn)定時間產(chǎn)生影響 [1]:
機械因素
傳感器的結(jié)構(gòu)(零位電壓、變壓比等)
傳感器規(guī)格隨溫度的變化
線圈不平衡:正弦和余弦線圈輸出電壓可能會不平衡,從而導致誤差
旋轉(zhuǎn)變壓器傳感器未對準:旋轉(zhuǎn)變壓器也許安裝錯誤,導致系統(tǒng)靜態(tài)誤差
旋轉(zhuǎn)變壓器傳感器的極的數(shù)量:由于每增加一對極就會多檢測360度,因此增加的極數(shù)會降低角誤差
電氣因素
旋轉(zhuǎn)變壓器模擬-數(shù)字轉(zhuǎn)換結(jié)構(gòu)
旋轉(zhuǎn)變壓器信號輸入到角輸出的時間延遲,反應(yīng)快速的角變化穩(wěn)定時間
模擬前端(AFE)部件的不平衡
系統(tǒng)具備處理環(huán)境因素的能力(例如,外部磁場或共模噪音)
穩(wěn)定時間
當旋轉(zhuǎn)變壓器的電機位置或輸出信號變化迅速時,穩(wěn)定時間是RDC控制系統(tǒng)的快速性能指標[2]。圖1顯示的一個是有階躍輸入變化(黑線)的RDC反饋控制系統(tǒng)的穩(wěn)定時間的例子。藍色信號顯示的是對電路的正常模式響應(yīng),紅色信號顯示的是加速模式過程中響應(yīng)(角快速變化)。為了在快速變化的條件下追蹤到旋轉(zhuǎn)角,加速模式幫助控制回路很容易跟蹤到一個快速的旋轉(zhuǎn)角[4]。
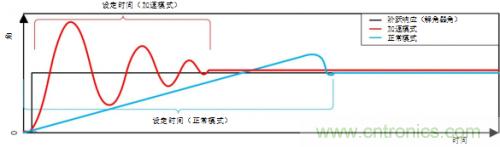
圖 1:RDC階躍響應(yīng)穩(wěn)定時間
EMC/EMI影響旋轉(zhuǎn)變壓器系統(tǒng)
電磁兼容性(EMC)指的是:電子系統(tǒng)要怎樣在電磁環(huán)境中運行而不產(chǎn)生問題(免疫力)。同樣地,系統(tǒng)發(fā)射脈沖一定不能干擾到范圍中的任何產(chǎn)品。在工業(yè)設(shè)備應(yīng)用中,變速驅(qū)動器和控制電路是主要干擾源。功率元件的快速切換,例如絕緣柵雙極型晶體管(IGBT)和微控制器,是高頻發(fā)射或干擾的主要來源。IGBT切換時間可長達100nS。
電氣設(shè)備應(yīng)該不受高頻現(xiàn)象影響,例如:
1.靜電放電(ESD)
2.快速瞬變(也稱為EFT)
3.輻射電磁場
4.傳導射頻干擾
5.浪涌脈沖
限制條件由工業(yè)標準決定,例如IEC61800-3標準規(guī)定了包含AC/DC電機和控制電路的變速驅(qū)動器的電磁兼容性要求。在這樣的環(huán)境下,任何設(shè)計都應(yīng)該遵守確定的基本電氣設(shè)計原則,以減輕噪聲影響[3]。
1.電子PCB原理圖和布局設(shè)計:
a.分別進行電源和模擬接地
b.使用模擬濾波器來消除感測器信號上的共模噪音
c.針對高頻干擾(如:鐵氧體磁珠)的高頻、低阻抗濾波器
d.最小化回環(huán)面積,以便接地可以為信號返回路徑提供盡可能低的阻抗
2.機械設(shè)計:
a.使用鎧裝的電纜和連接器(例如DB-9鎧裝連接器)
b.布線:最小化驅(qū)動器和感測器部件之間的電纜長度
c.使用鎧裝雙絞電源和控制電纜來避免干擾
d.使用雙鎧裝來降低輻射干擾
變速驅(qū)動器的電磁干擾免疫力要求
TI工程師測試IEC61800-3標準來獲取環(huán)境規(guī)范(表1)。該設(shè)計使用鎧裝連接器和鎧裝電纜(長度>30m)。標準的定義見表2。
環(huán)境2
連接器 測試對象 基準 水平 標準
柜/箱 ESD IEC61000-4-2 4kV (8kV) CD or 8kV (15kV) AD 1) B
輻射RF IEC61000-4-3 80-1000MHz, 10V/m, 80% AM (1kHz) A
控制信號和DC輔助電源接口 <60V EFT IEC61000-4-4 ±2kV (4kV)/5kHz,電容耦合 B
浪涌1,2/50us, 8/20us IEC61000-4-5 ±1kV (2kV):鎧裝電纜(2Ohm/500A);最小長度:20m B
傳導RF IEC61000-4-6 0.15-80 MHz, 10V/m, 80% AM (1kHz) A
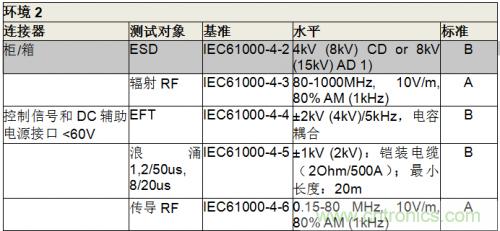
表1:IEC61800-3規(guī)定的變速驅(qū)動器的EMC規(guī)范
等級 性能(通過)標準
A 該模塊應(yīng)像預(yù)期的那樣持續(xù)運行。甚至在測試時沒有功能或性能缺失。
B 暫時的性能降級可以接受。測試后,該模塊應(yīng)像預(yù)期的那樣持續(xù)運行且不需要手動干預(yù)。
C 在測試過程中,在不損壞硬件或軟件的前提下,功能缺失可以接受。測試后,該模塊應(yīng)在手動啟動或關(guān)閉后能像預(yù)期的那樣持續(xù)運行。
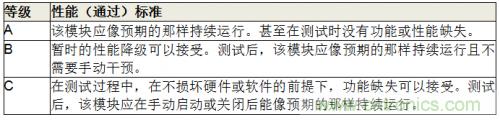
表2:IEC61800-3通過性能標準
EMI結(jié)果來自哪里?
任何高dl/dt或dV/dt都可能作為電磁干擾(EMI)的重要潛在源頭。電子信號的EDGE率可以產(chǎn)生諧波和互調(diào)失真。例如,一邊10ns的EDGE率和另一邊1ns的EDGE率導致10MHz的方波。這展示了增加的諧波含量如何伴隨具有更快Edge Rate的方波。使用等式1作為一個計算特定Edge Rate下的諧波頻率范圍的一般公式:
(1)
根據(jù)該公式,10nsEdge Rate對應(yīng)的諧波頻率大約為31.8MHz。圖3顯示:最后一個重要的諧波頻率為30MHZ。同時,1ns的Edge Rate對應(yīng)的諧波頻率318MHZ(圖2)。如果頻率范圍擴展到300MHZ以外,顯示的諧波仍很明顯,但卻在相關(guān)頻率上迅速變小。
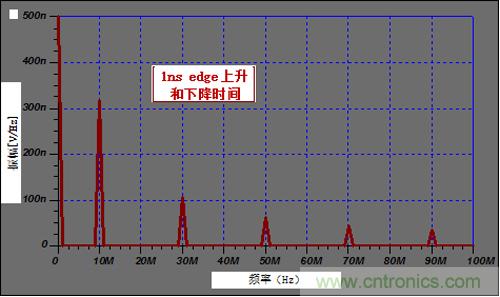
圖 2:10MHz方波頻譜
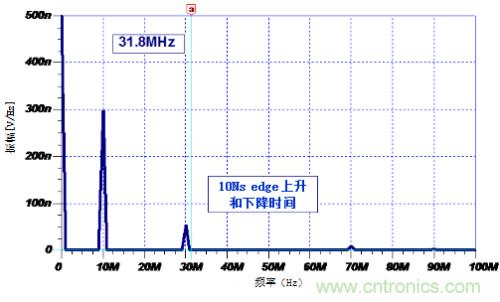
圖 3:31.8MHz方波頻譜
這些方法可以幫助降低噪音對旋轉(zhuǎn)變壓器系統(tǒng)精度的整體影響:
1.使用差分信號幫助減少電纜中的電氣噪音
2.鎧裝線纜噪音在影響傳感器電路和產(chǎn)生誤差之前傳入地下
3.在RDC結(jié)構(gòu)中使用的模擬前端(AFE)可以過濾掉共模噪音
4.爭取獲得具有盡可能低阻抗的接近完美的接地方式
5.盡可能縮小扮演EMI天線角色的環(huán)路
屏蔽和過濾
所有導電的部件,如電纜、地、金屬外殼等,可以傳播輻射。電纜的轉(zhuǎn)移阻抗必須在頻率達到100MHz的范圍內(nèi)低于100 mΩ/m。最高的屏蔽效果可以使用金屬導管或波紋鋁屏蔽層實現(xiàn)。電纜路徑越長,要求的轉(zhuǎn)移阻抗越低??梢栽谛盘栯娎|中使用共模電感器,以在一個特定功率上抑制共模干擾。一個理想的共模電感器不會一直差模信號。Faraday Cage(法拉第籠)技術(shù)是另一個常用的控制輻射干擾的方法。

圖 4:抑制共模噪音的扼流實例
結(jié)論
工業(yè)電機位置傳感應(yīng)用中的獨特高精度與噪音挑戰(zhàn),可以通過全面的設(shè)計考量和仔細的電子元件選擇來解決。設(shè)計旋轉(zhuǎn)變壓器時,設(shè)計師應(yīng)考慮系統(tǒng)穩(wěn)定時間的規(guī)范、有關(guān)EMI/EMC的芯片性能以及這些因素如何影響整體的系統(tǒng)精度。

