
【導讀】電動汽車是一個復雜的機電一體化產(chǎn)品,其中的許多部件包括動力電池、電機、充電機、能量回收裝置、輔助電池充電裝置等都會涉及高壓電器絕緣問題。這些部件的工作條件比較惡劣,振動、酸堿氣體的腐蝕、溫度及濕度的變化,都有可能造成動力電纜及其他絕緣材料迅速老化甚至絕緣破損,使設備絕緣強度大大降低,危及人身安全。
目前發(fā)電廠、變電站等場所直流高壓系統(tǒng)的絕緣監(jiān)測技術有多種方式,但都存在一些缺點,如繼電器檢測方式靈敏度低,平衡電橋法在正負極絕緣同時降低時不能準確及時報警,注入交流信號法不僅會使直流系統(tǒng)紋波增大,影響供電質量,而且系統(tǒng)的分布電容會直接影響測量結果,分辨率低。與電力系統(tǒng)直流絕緣監(jiān)測不同的是,電動汽車直流系統(tǒng)電壓等級涵蓋90~500V的寬范圍,而且運行過程中電壓頻繁變化。文中提出的利用端電壓監(jiān)測系統(tǒng)絕緣狀況的方法可以較好地解決上述問題,具有較高的精度,完全適合在電動汽車上應用。
二、絕緣電阻測量
原理電動汽車的絕緣狀況以直流正負母線對地的絕緣電阻來衡量。電動汽車的國際標準[1]規(guī)定:絕緣電阻值除以電動汽車直流系統(tǒng)標稱電壓U,結果應大于100Ω/V,才符合安全要求。標準中推薦的牽引蓄電池絕緣電阻測量方法適用于靜態(tài)測試,而不滿足實時監(jiān)測的要求。
文中通過測量電動汽車直流母線與電底盤之間的電壓,計算得到系統(tǒng)的絕緣電阻值。假設電動汽車的直流系統(tǒng)電壓(即電池總電壓)為U,待測的正、負母線與電底盤之間的絕緣電阻分別為RP、RN,正、負母線與電底盤之間的電壓分別為UP、UN,則待測直流系統(tǒng)的等效模型如圖1中的虛線框內所示。
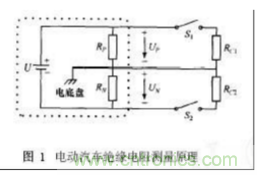
圖1為電動汽車絕緣電阻測量原理,圖中RC1、RC2為測量用的已知阻值的標準電阻。工作原理如下:當開關S1、S2全部斷開時,測量正、負母線與電底盤之間的電壓分別為UP0、UN0,由電路定律[2]可以得到
UP0/RP=UN0/RN(1)
當開關S1閉合、S2斷開時,則在正母線與電底盤之間加入標準偏置電阻RC1,測量正、負母線與電底盤之間的電壓分別為UPP、UNP,同樣可以得到
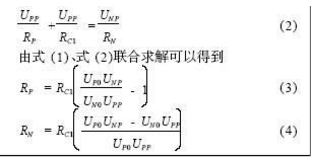
同樣,絕緣電阻在以下2種情況也可以得到: S1、S2全部斷開和S1斷開、S2閉合; (2)S1閉合、S2斷開和S1斷開、S2閉合。
三、測量結果誤差分析
由上述計算公式可知,絕緣電阻RP、RN的具體數(shù)值由4個測量電壓值和已知標準電阻計算得到,最終結果的精度與電壓測量和標準電阻的精度直接相關。另外,開關動作前后,電池電壓隨汽車加、減速的變化對結果的影響也應分析。
(一) 測量參數(shù)對精度的影響
假設電池總電壓U保持不變,UP0、UN0、UPP、UNP的測量相對誤差分別為γp0、γN0、γpp、γNP,標準電阻RC1的相對誤差為γRC,待測的RP、RN的實際值為RP0、RN0,且在測量過程中保持不變,根據(jù)誤差理論的誤差絕對值合成法[3]可以得到RP、RN的相對誤差γRP、γRN分別為:
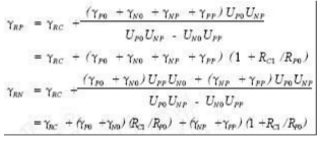
分析可知,系統(tǒng)的總誤差與標準電阻阻值和被測電阻之間的比例有直接的關系。當RC1nRP0時,系統(tǒng)的測量誤差最小。此時假設標準電阻的誤差可以忽略不計,電壓測量誤差γp0=γN0=γpp=γNP=γV,如果要求計算結果的總誤差γ≤5%,則電壓測量的誤差必須滿足γV≤1125%。
然而,電動汽車在實際長期運行過程中系統(tǒng)的絕緣電阻是變化的,而且RC1阻值不可能很?。ǚ駝t直接降低了電動車的絕緣狀況),阻值可以在靜態(tài)測量時的100~500Ω/V之間選擇,因此實際誤差要更大。例如,對于標稱300V的電動汽車直流系統(tǒng),選擇RC1=30kΩ,若要求絕緣電阻在最小值30kΩ時也滿足測量結果誤差小于5%,則必須使電壓測量誤差小于0.625%。
(二)電池電壓瞬變的影響
電動汽車的絕緣電阻一般來講是緩變參數(shù),而測量過程很快,因此可以認為測量過程中實際待測絕緣電阻阻值保持不變。
假設利用式(3)、式(4)對應的檢測方法,在S1、S2全部斷開時電池電壓為U,U=UP0+UN0,而S1閉合、S2斷開時電池電壓為U′,U′=U′PP+U′NP。
由式(3)、式(4)可以得到
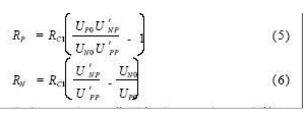
將式(5)、式(6)分別與式(3)、式(4)比較可知,要得到正確的結果,必須保證U′NP/U′PP=UNP/UPP成立。對于實際絕緣電阻不變的情況下,參照圖1所示電路,依據(jù)電路基本定律可以得到RN/(RP//RC1)(式中RP//RC1為2個電阻RP與RC1的并聯(lián)值,以下相同),該值在短暫的測量過程中可以作為恒值處理,但必須保證測量過程中對電壓UP0、UN0采樣的同時性和對UPP、UNP采樣的同時性,否則破壞了上述計算方法的正確條件。
四、系統(tǒng)設計
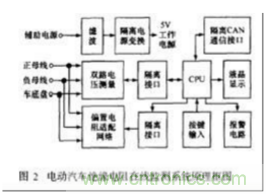
基于上述方法設計的系統(tǒng),主要完成如下幾方面功能:正負母線對電底盤的電壓測量、標準偏置電阻的投切控制、報警參數(shù)設置、聲光報警電路、液晶顯示及通信。整個系統(tǒng)的硬件結構如圖2所示。
(一)偏置電阻的自動配置
標準偏置電阻的選擇應遵循以下原則:(1)基本不影響被測系統(tǒng)原有的絕緣性能;(2)要兼顧系統(tǒng)的測量精度要求;(3)根據(jù)系統(tǒng)電壓等級自動配置不同等級的標準阻值;(4)高精度,低溫漂系數(shù)。
系統(tǒng)的實際偏置電阻配置如表1所示。

(二)電壓測量電路
由上述分析可知,在標準偏置電阻確定的情況下,電壓檢測的精度直接決定了最終結果的精度。一般來講,電動汽車的標稱電壓在90~500V之間,運行過程中電池電壓存在一定的波動范圍,并且待測絕緣電阻也有一定的變化范圍,因此,通用型監(jiān)測系統(tǒng)的電壓測量電路必須保證在全范圍內實現(xiàn)等精度的測量,而且正、負母線對地電壓的測量必須同時完成。文中采用低溫漂精密電阻分壓電路,結合雙積分型高分辨率的A/D實現(xiàn)了等精度測量,主控單元與測量電路采用光電耦合器隔離。該種方法與采用LEM電壓傳感器的測量方案相比,克服了后者的溫漂、零點漂移等問題,同時避免了其需要的10mA左右的工作電流影響被測系統(tǒng)的絕緣性能的缺點。
正、負母線對地電壓的測量電路的結構和參數(shù)完全一致,其采集過程由CPU控制同時啟動轉換,滿足測量參數(shù)的同時性。
(三)系統(tǒng)核心——CPU
CPU選用Motorola推出的HCS12系列16位MCU29S12DJ64[4],內部除中央處理單元CPU12外,不僅集成了FLASH、EEPROM及RAM存貯器,而且還集成CAN、BDLC、SCI、SPI和HSIO等多種接口,功能豐富,速度高、功耗低、性價比高、系統(tǒng)設計簡單,同時芯片支持背景調試模式和大容量存貯器擴展。FLASH存貯器具有快速編程能力,靈活的保護與安全機制,而且擦除和寫入無需外部加高電壓。
五、試驗結果
該系統(tǒng)分別在汕頭國家電動汽車試驗示范區(qū)和浙江萬向集團電動汽車開發(fā)中心的電動中巴車和電動轎車上進行了裝車運行試驗。
在汕頭的一輛中巴車上安裝系統(tǒng)時,接線人員不小心用手碰到了正母線,馬上有被電的感覺。中巴車額定電壓110V,因此報警值設定為11kΩ。系統(tǒng)接線完成后進入正常工作,馬上就發(fā)出聲光報警。
監(jiān)測發(fā)現(xiàn),正、負母線對車體的絕緣電阻分別僅為112kΩ和2kΩ,明顯低于標準規(guī)定的安全閾值,因此汕頭方面馬上對車進行了改造。這說明監(jiān)測系統(tǒng)可以及時發(fā)現(xiàn)故障并通知使用者,提高電動車使用的安全性。
(一)試驗過程
試驗中利用CAN接口將測量參數(shù)與計算結果發(fā)送給監(jiān)控筆記本電腦以記錄數(shù)據(jù)。具體試驗過程如下:首先,利用該系統(tǒng)測量試驗車輛自身固有的正負絕緣電阻RP0、RN0;然后,為了測試監(jiān)測系統(tǒng)的功能,在電動車實際運行過程中,人為地向正負母線分別并入一系列的標準電阻,改變電動車的絕緣電阻值,以測試系統(tǒng)針對不同的絕緣電阻值的測量情況。
(二)部分試驗數(shù)據(jù)
試驗準備階段,利用系統(tǒng)測量電動車的RP0、RN0,結果2個阻值都顯示為6.5MΩ。由于系統(tǒng)的測量阻值上限為6.5MΩ,當電阻的測量結果超出上限時系統(tǒng)也會顯示為上限值,因此說明試驗用電動車的初始絕緣狀況良好。
保持RNI=2000kΩ不變,令RPI=1000kΩ,記錄RPM、RNM。然后改變RPI的阻值大小,記錄相應結果,如表2所示。

保持RPI=2000kΩ不變,令RNI=1000kΩ,記錄RPM、RNM。然后改變RNI的阻值大小,記錄相應結果,如表3所示。

表中參數(shù)意義如下:RPI為正母線與車體之間并入的試驗電阻;RNI為負母線與車體之間并入的試驗電阻;RPM為正母線絕緣電阻的測量值;RNM為負母線絕緣電阻的測量值;γP為正母線電阻測量結果與實際值的誤差;γN為負母線電阻測量結果與實際值的誤差;RPC為正母線絕緣電阻的理論計算結果;RNC為負母線絕緣電阻的理論計算結果;γPMC為正母線電阻測量結果與理論計算的誤差;γNMC為負母線電阻測量結果與理論計算的誤差。
根據(jù)上述測量數(shù)據(jù)及誤差計算可知:
(1)系統(tǒng)測量結果與理論計算的誤差γPMC、γNMC在±015%以內。誤差主要是由計算過程的近似以及對測量參數(shù)的舍入處理造成的,兩者結果基本一致。
(2)系統(tǒng)測量結果與實際值之間的誤差γP、γN,在整個測量范圍都可以保證在±5%以內,具有較高精度。
因此,在電動車的加速、減速、平穩(wěn)運行以及停車等不同工況下,對于不同的實際絕緣電阻狀況,系統(tǒng)可以穩(wěn)定可靠工作,并且能夠保證±5%的測量精度,滿足設計要求。
六、結論
絕緣電阻在線監(jiān)測方法可以完成實時在線監(jiān)測電動汽車的絕緣電阻,現(xiàn)場裝車運行試驗到目前為止一直正常運行,無論是系統(tǒng)的檢測精度還是抗干擾能力都取得了較為滿意的結果。
推薦閱讀:





