

【導(dǎo)讀】本文重點(diǎn)介紹基于霍爾效應(yīng)開(kāi)關(guān)的主要反饋系統(tǒng),提供關(guān)于一般工作原理和傳感器要求的說(shuō)明,展示了英飛凌 BLDC 應(yīng)用專(zhuān)用霍爾效應(yīng)開(kāi)關(guān)。
圖 1 顯示了霍爾效應(yīng)開(kāi)關(guān)反饋的最簡(jiǎn)單的應(yīng)用示例。三個(gè)霍爾傳感器被 120°相角隔開(kāi),通過(guò)轉(zhuǎn)子磁體觸發(fā)。這些傳感器每 60°獲得一個(gè)新的數(shù)字狀態(tài),并據(jù)此產(chǎn)生圖 2 所示的開(kāi)關(guān)樣式。因此,可以知曉轉(zhuǎn)子位置,分辨率為 60°;若將霍爾傳感器放置在合適的位置,就可以令信號(hào)轉(zhuǎn)換與線(xiàn)圈勵(lì)磁理想換向點(diǎn)精確匹配。 在這個(gè)包絡(luò)內(nèi),可以使用任意恒定的或脈寬調(diào)制 (PWM) 驅(qū)動(dòng)信號(hào)為線(xiàn)圈供電,驅(qū)動(dòng)電機(jī)運(yùn)轉(zhuǎn)。
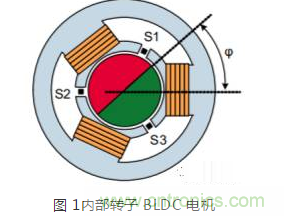
圖 1內(nèi)部轉(zhuǎn)子 BLDC 電機(jī)
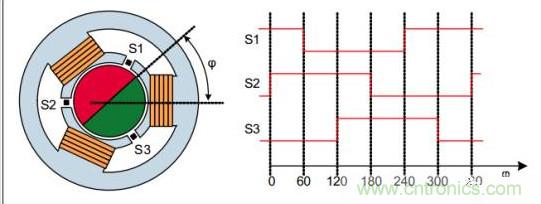
圖 2霍爾開(kāi)關(guān) S1 至 S3 在轉(zhuǎn)子旋轉(zhuǎn)一周過(guò)程中的開(kāi)關(guān)模式
在許多無(wú)刷直流電機(jī)中,霍爾傳感器直接檢測(cè)轉(zhuǎn)子磁體的磁場(chǎng)。其結(jié)果是,傳感器安裝在電機(jī)內(nèi)部,暴露在高溫和振動(dòng)中,缺乏密封保護(hù),氣體和液體可能對(duì)部件造成影響。此外,安裝新的傳感器,尤其是更換故障部件是非常細(xì)致的工作,費(fèi)用很高。有些電機(jī)在軸上加裝一個(gè)磁環(huán),通過(guò)這個(gè)磁環(huán)來(lái)觸發(fā)霍爾開(kāi)關(guān),從而允許霍爾開(kāi)關(guān)遠(yuǎn)離加熱部件。圖 3 顯示的就是這類(lèi)應(yīng)用示例。這個(gè)解決方案的好處是溫度更低、更便于接觸并且提高了設(shè)計(jì)的靈活性,但這些優(yōu)勢(shì)也是有代價(jià)的:增加了加裝磁碼盤(pán)的費(fèi)用。在這類(lèi)設(shè)計(jì)中,霍爾開(kāi)關(guān)模式中的角度傳感器別具吸引力。
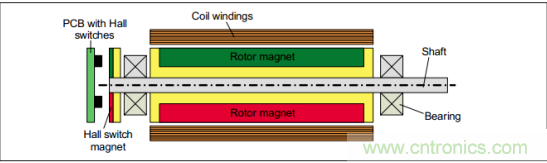
圖 3BLDC 電機(jī),帶外部霍爾開(kāi)關(guān)磁體
1、傳感器類(lèi)型
霍爾效應(yīng)開(kāi)關(guān)在兩種邏輯狀態(tài)之間切換,這兩個(gè)開(kāi)關(guān)點(diǎn)之間有一定的滯后。人們通常將這類(lèi)器件分成兩個(gè)大類(lèi):?jiǎn)螛O開(kāi)關(guān),雙極鎖存。 這里不考慮全極開(kāi)關(guān)和雙極開(kāi)關(guān)。
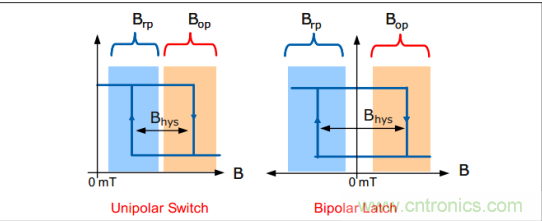
圖 4單極開(kāi)關(guān)與雙極開(kāi)關(guān)
單極開(kāi)關(guān)
圖 4 介紹了單極開(kāi)關(guān)的工作原理。當(dāng)外加磁場(chǎng)穿過(guò)工作點(diǎn) BOP 時(shí),器件輸出開(kāi)啟。若磁場(chǎng)被釋放,在 Brp 達(dá)到零場(chǎng)之前,器件切換回關(guān)閉狀態(tài)。通過(guò)一些滯后 Bhys 來(lái)避免兩種狀態(tài)之間發(fā)生瞬態(tài)快速切換事件。
雙極鎖存器
與單極開(kāi)關(guān)相似,雙極鎖存器也在磁場(chǎng)穿過(guò) Bop 后開(kāi)啟。不過(guò),釋放磁場(chǎng)之后,雙極鎖存器即使在零場(chǎng)中也會(huì)保持其狀態(tài)。只有當(dāng)極性反轉(zhuǎn)的磁場(chǎng)通過(guò) Brp 后,器件才會(huì)返回到關(guān)閉狀態(tài),如圖 4 所示。因此這些器件名副其實(shí),能夠有效地鎖存其狀態(tài)。
1、霍爾效應(yīng)開(kāi)關(guān)的要求
接下來(lái),讓我們來(lái)看一些關(guān)于 BLDC 電機(jī)換向用霍爾效應(yīng)開(kāi)關(guān)的具體要求:
單極與雙極
傳感器的任務(wù)是準(zhǔn)確地檢測(cè)轉(zhuǎn)子的位置。理想的情況是,轉(zhuǎn)子位置每次正好改變 60°時(shí)傳感器就提供一個(gè)換向信號(hào),不考慮電機(jī)速度和施加的扭矩,每個(gè)傳感器每 180°切換一次輸出。圖 5 顯示了一個(gè)傳統(tǒng)的單極開(kāi)關(guān)和兩個(gè)不同的雙極鎖存器的行為??梢钥闯?,單極開(kāi)關(guān)會(huì)帶來(lái)不平衡的占空比,而雙極鎖存器在 Bop 和 Brp 絕對(duì)值相等時(shí),占空比正好為 50%。靈敏度越高,延遲就越小,這就是首選接近 0mT 的開(kāi)關(guān)點(diǎn)的原因。因此,高靈敏度的雙極鎖存器是這個(gè)應(yīng)用的最佳選擇。
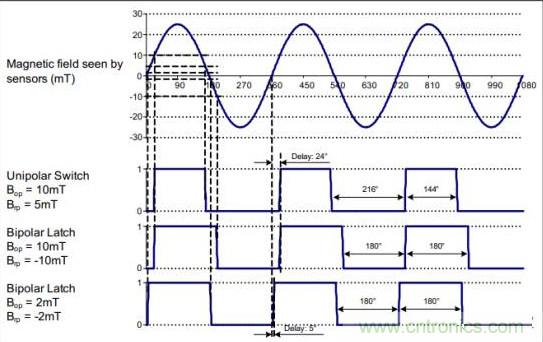
圖 5不同霍爾開(kāi)關(guān)的開(kāi)關(guān)圖。高靈敏度的雙極鎖存器延遲最低,占空比平衡
開(kāi)關(guān)點(diǎn)精度
很遺憾,由于半導(dǎo)體制造過(guò)程中有過(guò)程差異,所以無(wú)法創(chuàng)造出相同的傳感器。每個(gè)傳感器都有其個(gè)性,并且事實(shí)證明,磁開(kāi)關(guān)點(diǎn)是一個(gè)嚴(yán)重受工藝差異影響的參數(shù)。此外,環(huán)境的影響,例如因二次成型或濕度導(dǎo)致的機(jī)械應(yīng)力等,也會(huì)導(dǎo)致開(kāi)關(guān)點(diǎn)在器件壽命期間發(fā)生偏移。為了減少這些影響,一些霍爾效應(yīng)開(kāi)關(guān)采用斬波原理,通過(guò)一個(gè)巧妙的方法來(lái)消除霍爾探頭和輸入放大器級(jí)的偏移。此技術(shù)允許用戶(hù)在僅具有小差異的狹窄窗口內(nèi)指定開(kāi)關(guān)點(diǎn)。由此帶來(lái)的機(jī)械應(yīng)力高抗性能也是 TLE49x6 系列的另一大優(yōu)勢(shì)。
圖7是顯示了有不同開(kāi)關(guān)點(diǎn)差異的兩個(gè)雙極鎖存器之間的對(duì)比情況??梢钥闯觯谧顗牡那闆r下,如果Bop和Brp正好在指定開(kāi)關(guān)點(diǎn)范圍的任一端上,占空比可能很不平衡。 部分器件采用上述斬波原理,開(kāi)關(guān)點(diǎn)的差異更小,因此對(duì)占空比的影響非常小,旋轉(zhuǎn)一整周過(guò)程中電機(jī)可以實(shí)現(xiàn)平衡致動(dòng)。
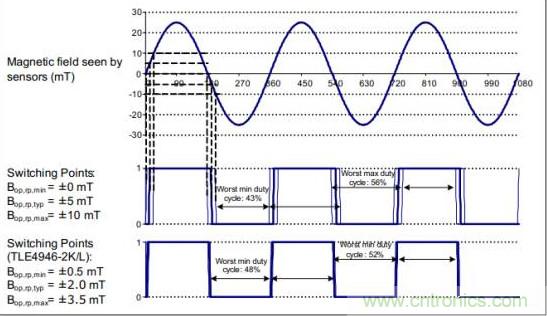
圖 6開(kāi)關(guān)點(diǎn)差異對(duì)占空比的影響較小的差異可以帶來(lái)平衡的占空比
延遲
磁場(chǎng)過(guò)零點(diǎn)后立刻換向,不應(yīng)傳感器內(nèi)部處理而被延遲。英飛凌的霍爾開(kāi)關(guān)是基于一個(gè)輸入與輸出只有微小延遲的快速信號(hào)路徑。
抖動(dòng)
開(kāi)關(guān)樣式的重復(fù)性是電機(jī)換向應(yīng)用的另一個(gè)重要標(biāo)準(zhǔn)。用抖動(dòng)參數(shù)來(lái)識(shí)別常規(guī)操作過(guò)程中開(kāi)關(guān)點(diǎn)的變化幅度有多大。
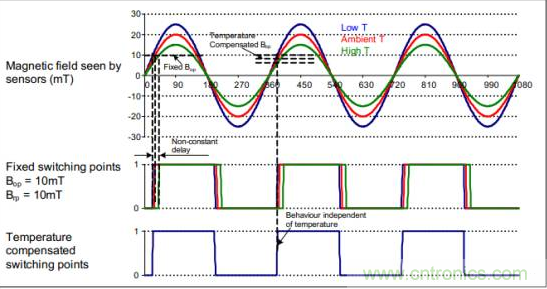
圖 7固定式開(kāi)關(guān)點(diǎn)與溫度補(bǔ)償式開(kāi)關(guān)點(diǎn)
2、霍爾開(kāi)關(guān)模式的角度傳感器
針對(duì)可以使用如圖 3 所示外部霍爾磁體的應(yīng)用,有只要一個(gè)傳感器就可以創(chuàng)建霍爾效應(yīng)開(kāi)關(guān)的開(kāi)關(guān)模式,基于獲諾貝爾獎(jiǎng)的巨磁阻 (GMR) 效應(yīng)原理,將標(biāo)準(zhǔn)硅處理工藝融入其成功的 iGMR 技術(shù)中。如圖 8 顯示,在電機(jī)軸上安裝一個(gè)簡(jiǎn)單的圓柱形磁體,用于創(chuàng)建通過(guò)2、3、4、6、7、8、12 和16 個(gè)極對(duì)驅(qū)動(dòng)轉(zhuǎn)子所需的開(kāi)關(guān)模式。憑借自動(dòng)校準(zhǔn)算法,在溫度范圍和工作壽命期間可以獲得小于 1°的角度誤差(機(jī)械),其開(kāi)關(guān)模式通??梢员茸罹_的霍爾開(kāi)關(guān)提供的開(kāi)關(guān)模式更準(zhǔn)確。
對(duì)一些要求更高轉(zhuǎn)矩平滑性的電機(jī)來(lái)說(shuō),只使用在大多數(shù)無(wú)刷直流電機(jī)中采用的塊換向是不夠的,它們需要使用特殊的繞組設(shè)計(jì)和適配的驅(qū)動(dòng)算法來(lái)同步驅(qū)動(dòng)電機(jī)。這些永磁同步電機(jī) (PMSM) 通常需要更精確的反饋。
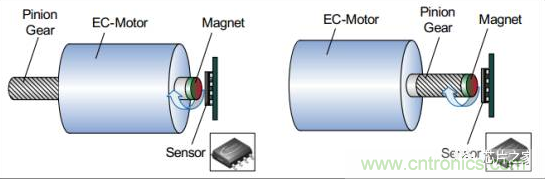
圖 8安裝霍爾傳感器,軸上有一塊徑向磁體
推薦閱讀:

