
【導(dǎo)讀】該機(jī)器人的最小系統(tǒng)為,觸摸屏模塊,超聲波模塊,攝像頭圖像采集模塊,直流電機(jī)閉環(huán)控制系統(tǒng),在整個(gè)系統(tǒng)中測(cè)距是最總要的一環(huán),它直接影響電機(jī)運(yùn)行距離的精度,在有效范圍內(nèi)的圖像采集控制。整個(gè)系統(tǒng)都是在ARM9 與linux 平臺(tái)中完成,每個(gè)模塊都是用設(shè)備驅(qū)動(dòng)的方式實(shí)現(xiàn)使得模塊的控制更加方便。
1、引言
在項(xiàng)目開(kāi)發(fā)中采用從英國(guó)進(jìn)口的SRF05 超聲波傳感器,它的回波反饋與測(cè)距方式與通常使用的超聲波傳感器相比較特別, 在ARM中實(shí)現(xiàn)也稍有難度, 但該傳感器精度很高可達(dá)到1cm, 因此用該傳感器去掉了用于近距離測(cè)距的紅外測(cè)距模塊節(jié)約了硬件資源。
該機(jī)器人的最小系統(tǒng)為,觸摸屏模塊,超聲波模塊,攝像頭圖像采集模塊,直流電機(jī)閉環(huán)控制系統(tǒng),在整個(gè)系統(tǒng)中測(cè)距是最總要的一環(huán),它直接影響電機(jī)運(yùn)行距離的精度,在有效范圍內(nèi)的圖像采集控制。整個(gè)系統(tǒng)都是在ARM9 與linux 平臺(tái)中完成,每個(gè)模塊都是用設(shè)備驅(qū)動(dòng)的方式實(shí)現(xiàn)使得模塊的控制更加方便。
2、SRF05 超聲波測(cè)距方法
提供一個(gè)10us 的脈沖觸發(fā)超聲波傳感器,SRF05 會(huì)發(fā)出8 個(gè)周期的頻率為40khz 的超頻脈沖,此時(shí)在echo 也是就回波口上的電平變?yōu)楦?,此時(shí)定時(shí)器開(kāi)始計(jì)時(shí),等到echo 變?yōu)榈碗娖阶C明有障礙物此時(shí)停止計(jì)時(shí),高脈沖的寬度有測(cè)距的距離成正比,該超聲波的有效測(cè)距范圍為1cm~4m, 因此如果沒(méi)有障礙物或障礙物大于4m,echo 依然會(huì)變?yōu)榈碗娖酱藭r(shí)定時(shí)器的時(shí)間為30ms, 因此在測(cè)距時(shí)定時(shí)器的周期應(yīng)大于30ms 這樣才能有效測(cè)距。
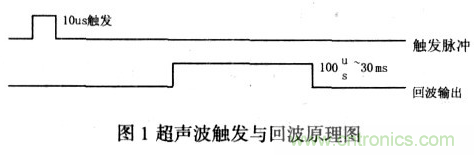
原理如圖1 所示。
3、超聲波測(cè)距軟件實(shí)現(xiàn)
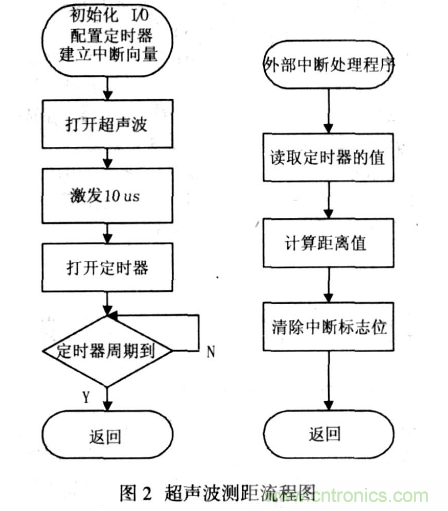
如圖2 為超聲波測(cè)距的流程圖。
3.1 回波檢測(cè)的采集方法
超聲波的回波的檢測(cè)是個(gè)難點(diǎn), 因?yàn)樵贏RM中一個(gè)端口設(shè)置中斷只能設(shè)置一種觸發(fā)方式, 如果設(shè)為上升沿觸發(fā)可以打開(kāi)定時(shí)器定時(shí)但無(wú)法捕獲下降沿,也就無(wú)法關(guān)閉定時(shí)器,從而不能測(cè)距, 因此用軟件的方式實(shí)現(xiàn)。首先設(shè)置兩個(gè)時(shí)間延遲函數(shù)usdelay()和msdelay(),這樣可以在給出高脈沖10us 后等超聲波觸發(fā)再打開(kāi)定時(shí)期計(jì)時(shí),在設(shè)置一個(gè)外部中斷eint1 接到超聲波傳感器的echo 口并設(shè)置為下降沿觸發(fā),等下降沿來(lái)臨關(guān)閉定時(shí)器讀出值既為脈寬的時(shí)間長(zhǎng)度,然后根據(jù)障礙物的距離=(ECHO高電平的時(shí)間)* 聲納速度/2 得出距離??諝庵衯 與溫度關(guān)系:v=331.5√1+T/273 m/s,T 為攝氏溫度。一般情況下超聲波速近似聲速,在室內(nèi)溫度影響下取約343.2m/s。
3.2 超聲波觸發(fā)的實(shí)現(xiàn)
利用數(shù)字示波器精確設(shè)計(jì)一個(gè)軟件計(jì)時(shí)函數(shù)usdelay (),具體實(shí)現(xiàn)如下。
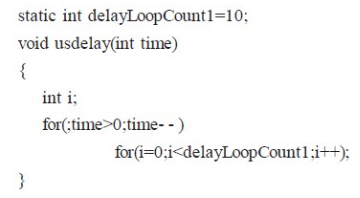
則usdelay(1)既為10us,該函數(shù)用于在給出激發(fā)高脈沖后延續(xù)10us 然后關(guān)脈沖。
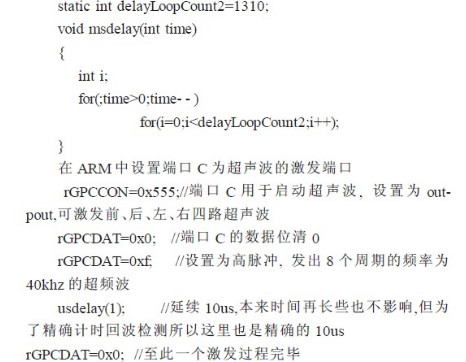
還要設(shè)計(jì)一個(gè)msdelay()用于控制整個(gè)測(cè)距周期的時(shí)間值。
msdelay(1000)在主函數(shù)數(shù)中用于延遲1s,這樣定時(shí)器可以完全有足夠的回波檢測(cè)時(shí)間同時(shí)也不會(huì)對(duì)其它三路超聲波信號(hào)造成干擾。
如下所示。
3.3 超聲波回波檢測(cè)的實(shí)現(xiàn)
回波檢測(cè)計(jì)算脈寬的時(shí)間需要用到定時(shí)器和外部中斷,外部中斷接超聲波的echo 并設(shè)置為下降沿觸發(fā)。定時(shí)器的初始化如下。
rTCFG0=0x9595; //預(yù)分頻值為95
rTCFG1=0x00000; //分割值1/2
rTCNTB0=10000; /
根據(jù)T=[TCNTB0*(TCFG0+1)*(1/TCFG1)]/50MHZ 得出定時(shí)器的周期為60ms 在這個(gè)時(shí)間段里足以計(jì)算回波時(shí)間。
外部中斷1 初始化如下
rGPFCON=0xaa; //GPF1 設(shè)置為EINT1
rINTMOD=0x0; //設(shè)置為普通中斷
rGPFUP=0xf; //禁止GPF0 上拉電阻
pISR_EINT1=(unsigned)Eint1Handler; //建立中斷向量
EnableIrq(BIT_EINT1); //使能中斷
rEXTINT0 =0x492; // EINT1 下降沿觸發(fā)
根據(jù)T=[TCNTB0*(TCFG0+1)*(1/TCFG1)]/50MHZ 得出定時(shí)器的周期為60ms 在這個(gè)時(shí)間段里足以計(jì)算回波時(shí)間。
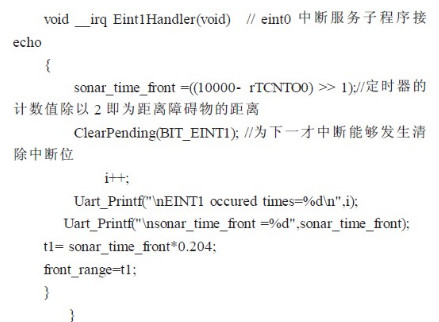
3.4 在外部中斷中計(jì)算機(jī)距離
3.5 循環(huán)控制與輪詢測(cè)距
由于超聲波之間有干擾,采用輪詢的方式依次打開(kāi)超聲波,每次只測(cè)一個(gè),這樣可以有效地避免干擾,為了提高實(shí)時(shí)性可以控制定時(shí)器周期,比如設(shè)置為35ms,這樣四路超聲波輪詢一次大約為140ms,足以滿足實(shí)時(shí)要求。
4、機(jī)器人控制的實(shí)現(xiàn)
圖3 為利用超聲波的反饋信息控制機(jī)器人直流電機(jī)閉環(huán)系統(tǒng)的總體結(jié)構(gòu)圖。
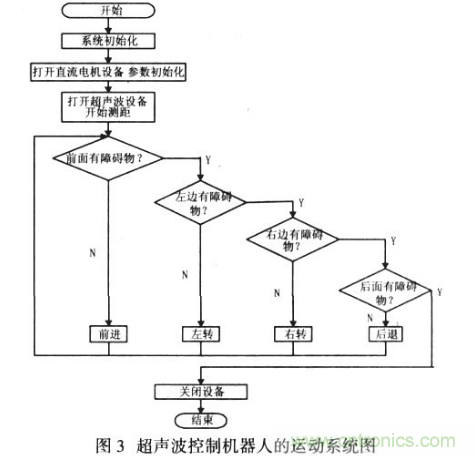
linux 系統(tǒng)中超聲波傳感器為只讀的字符設(shè)備,具體應(yīng)用為在應(yīng)用程序下打開(kāi)超聲波設(shè)備,然后在驅(qū)動(dòng)中測(cè)距,測(cè)得的數(shù)據(jù)傳到應(yīng)用程序,應(yīng)用程序中有超聲波的避障算法,根據(jù)算法判斷障礙物的位置給直流電機(jī)控制信號(hào)進(jìn)行避障導(dǎo)航。
觸摸屏中的圖形界面中含有機(jī)器人的指令設(shè)置, 可以設(shè)置運(yùn)行速度,圖像采集與超聲波模塊的打開(kāi)與關(guān)閉,是否開(kāi)啟機(jī)器人模糊算法運(yùn)行軌跡還是使用普通的PID 調(diào)節(jié), 這使得機(jī)器人有很多種方案可以選擇。
機(jī)器人的每一次行為都是根據(jù)超聲波傳感器測(cè)得的值和當(dāng)前機(jī)器人運(yùn)行的即時(shí)速度來(lái)來(lái)給出將要運(yùn)行的時(shí)間, 在遇到障礙物時(shí)(0<t<30us 等于30 微秒時(shí)達(dá)到超聲波的最大探測(cè)距離), 開(kāi)啟攝像頭圖像采集模塊, 這時(shí)攝像頭會(huì)拍下障礙物的圖像,并利用無(wú)線MODEM把圖像傳回控制電腦,這樣用戶就可以知道前方是什么障礙物, 該系統(tǒng)實(shí)現(xiàn)了移動(dòng)機(jī)器人的自主避障和采集障礙物信息的作用,可以用來(lái)探測(cè)未知環(huán)境。
5、結(jié)論
本文采用新型的超聲波傳感器,在ARM9 與嵌入式linux 為平臺(tái)的移動(dòng)機(jī)器人上實(shí)現(xiàn)了超聲波的測(cè)距, 并利用超聲波傳感器控制運(yùn)動(dòng)系統(tǒng)和圖像采集系統(tǒng)。該機(jī)器人目前已經(jīng)成功應(yīng)用與本項(xiàng)目的開(kāi)發(fā)并取得良好的效果。
本文創(chuàng)新點(diǎn):采用一種精度高的新型超聲波傳感器,用軟件方法克服了它在ARM9 中不利于檢測(cè)回波的問(wèn)題,成功應(yīng)用于移動(dòng)機(jī)器人的運(yùn)行軌跡控制, 使得機(jī)器人無(wú)論在行走和圖像采集的即時(shí)性上都得到了很大的高。
推薦閱讀:


