
【導(dǎo)讀】除了最基本的取放(Pick&Place)應(yīng)用外,由于感測(cè)技術(shù)不斷進(jìn)步,現(xiàn)在機(jī)器手臂能勝任的工作已越來越多元化。 許多過去只能靠人工操作的組裝流程,例如軟板(PFC)、纜線的插件作業(yè),現(xiàn)在也能靠機(jī)器手臂代勞;有些連人力都不見得能做得好的微米級(jí)精密組裝,只要搭配正確的感測(cè)技術(shù),機(jī)器手臂也能大展身手。
力覺感測(cè)技術(shù)就是讓機(jī)器手臂也能勝任軟板/纜線插件、微米級(jí)精密組裝等「細(xì)活」的關(guān)鍵。 藉由力覺感測(cè),手臂能感知其所接觸的對(duì)象反饋給機(jī)器手臂的力量,同時(shí)也讓手臂得以精準(zhǔn)地控制其對(duì)工件所施加的力道。 這不僅讓手臂得以勝任各種需要纖細(xì)力道控制的工作,對(duì)容易破碎的物體進(jìn)行作業(yè),也讓手臂能夠精準(zhǔn)地把工件插入孔位。
力覺感測(cè)結(jié)合手臂的特殊考慮因素
對(duì)機(jī)器手臂而言,除了機(jī)器視覺之外,力覺也是一個(gè)很常見的配套感測(cè)技術(shù)。 但相較于視覺,力覺感測(cè)屬于接觸式感測(cè),因此力覺感測(cè)的設(shè)計(jì)開發(fā)要顧慮到許多機(jī)械結(jié)構(gòu)的因素。
雖然力覺感測(cè)的技術(shù)流派眾多,但大致上都可用彈簧跟阻尼的概念來理解,因此,當(dāng)手臂上的力覺傳感器受到一股外力作用時(shí),傳感器會(huì)有程度不一的變形。
除了傳感器本身的變形外,另一個(gè)會(huì)影響到傳感器運(yùn)作的機(jī)械性因素是傳感器跟控制器的配線。 目前市面上絕大多數(shù)的機(jī)器手臂若要搭載力覺傳感器,都是用外掛的方式加裝在手臂上,傳感器與控制器之間的連接線纜則裸露在手臂本體外。 因此,若配線時(shí)沒有保留適當(dāng)?shù)脑6?,手臂伸縮運(yùn)作會(huì)拉扯到配線,使力覺傳感器受力,從而影響力覺傳感器的讀數(shù)。
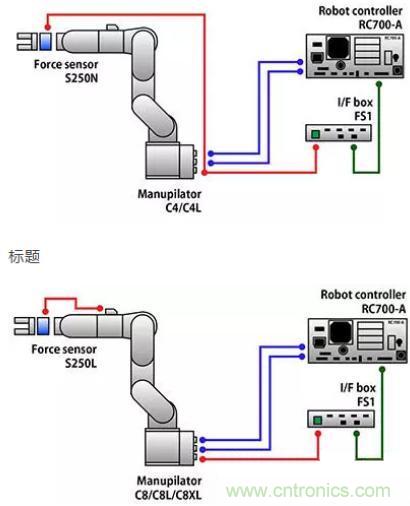
圖1跟圖2是兩種力覺傳感器整合在機(jī)器手臂上的配線方式,圖1是完全外露的配線方式,圖2則是讓線路在機(jī)械手臂內(nèi)部走線。 在由圖2可看出,在設(shè)計(jì)時(shí)就考慮到整合力覺傳感器需求的機(jī)種,像是愛普生(Epson)的C8系列機(jī)器手臂,在配在線會(huì)相對(duì)輕松許多,因?yàn)槁懵对谕獾木€路很短,不太需要擔(dān)心手臂運(yùn)動(dòng)會(huì)拉扯到線路,影響力覺感測(cè)。
除了機(jī)械性因素外,傳感器本身的噪訊水平,也是影響傳感器精準(zhǔn)度的一個(gè)重要因素。 為了獲得更好的分辨率,傳感器本身的噪訊水平必須非常低,否則訊號(hào)會(huì)被噪聲蓋過。
簡(jiǎn)化開發(fā)/降低成本 統(tǒng)一軟硬件平臺(tái)有大用
不可諱言的是,力覺感測(cè)是一種成本較高,應(yīng)用上也有比較多因素需要考慮的技術(shù),因此,目前力覺感測(cè)在產(chǎn)在線的運(yùn)用還沒到十分普及的地步。 如何降低門坎,遂成為手臂/力覺方案供貨商必須面對(duì)的課題。
就如同機(jī)器視覺跟機(jī)器手臂采用統(tǒng)一平臺(tái),可以帶來很顯著的效益。 力覺跟手臂供貨商如果能預(yù)先考慮到整合應(yīng)用的需求,在產(chǎn)品設(shè)計(jì)時(shí)就提出完整的對(duì)策,也可幫用戶跟系統(tǒng)整合者省下許多麻煩。 前面提到,在手臂本體上預(yù)留力覺傳感器的連接接口,就是一個(gè)很顯著的例子。
不過,如果是只提供機(jī)器手臂或力覺感測(cè)方案的業(yè)者,要在產(chǎn)品設(shè)計(jì)時(shí)間就有這么周延的考慮,其實(shí)有實(shí)務(wù)上的困難,而這也是由單一供貨商包辦整套方案的優(yōu)勢(shì)所在。
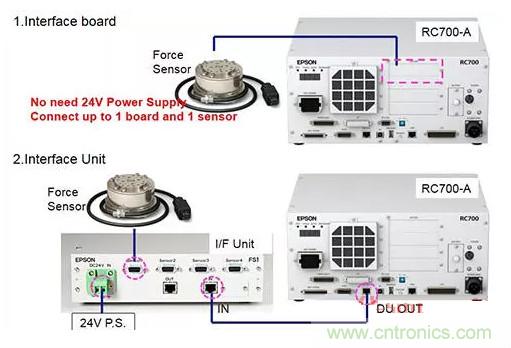
以愛普生為例,在硬件面,除了手臂上預(yù)留連接接口之外,如果能直接在手臂控制器上內(nèi)建力覺傳感器接口,就有機(jī)會(huì)幫用戶省下額外采購力覺感測(cè)處理器的成本。 如果是在比較單純的應(yīng)用情境,例如一支手臂搭配一顆力覺傳感器的狀況下,愛普生的手臂控制器(CU Controller)可以透過安裝適配卡的方式,直接與力覺傳感器建立聯(lián)機(jī)。 但如果應(yīng)用需要用到多顆力覺傳感器,則可以采用額外的一對(duì)多處理器,再與手臂控制器連接(圖3)。
在軟件整合層面,如果手臂跟力覺傳感器來自兩家不同的供貨商,系統(tǒng)整合者(SI)或制造業(yè)者內(nèi)部的自動(dòng)化工程團(tuán)隊(duì),也很難期望能用同一套開發(fā)工具為手臂跟力覺編寫控制程序,數(shù)據(jù)拋轉(zhuǎn)也會(huì)是個(gè)蠻麻煩的問題。 但如果手臂跟力覺來自同一家供貨商,不僅開發(fā)工具統(tǒng)一,甚至連程序撰寫都會(huì)變得相當(dāng)輕松。
事實(shí)上,對(duì)愛普生手臂跟力覺的軟件整合者而言,手臂跟力覺的整合是非常直覺的。 用戶甚至只須在既有的手臂控制程序后面加上一段力覺描述,就能完成軟件整合。 用戶也可以把力覺感測(cè)宣告為某種手臂動(dòng)作的觸發(fā)條件,當(dāng)力覺傳感器感應(yīng)到對(duì)應(yīng)的力量訊號(hào),就能指揮手臂進(jìn)行對(duì)應(yīng)的動(dòng)作。
此外,為了簡(jiǎn)化手臂控制程序的編寫,有些機(jī)器手臂業(yè)者開始推廣手動(dòng)教導(dǎo)式編程的概念,也就是用人手拉著機(jī)器手臂,讓機(jī)器手臂自行紀(jì)錄其運(yùn)動(dòng)軌跡,以取代傳統(tǒng)的程序編寫。 這種做法在協(xié)作型機(jī)器手臂上很流行,但工業(yè)手臂搭配力覺傳感器,其實(shí)也可以實(shí)現(xiàn)類似的功能。 在手動(dòng)教導(dǎo)模式下,手臂運(yùn)動(dòng)是外力(人手拉動(dòng))所造成的,故手臂上只要有力覺傳感器,能一五一十地記錄下手臂本體所受到的外力大小、方向,也能做到類似的功能。
力覺感測(cè)拓展機(jī)器手臂應(yīng)用范疇
對(duì)電子產(chǎn)品的組裝作業(yè)來說,使用整合了高分辨率力覺傳感器的機(jī)器手臂,最大的優(yōu)勢(shì)在于可以執(zhí)行十分高精密度的插件組裝作業(yè)。 此外,在高分辨率力覺感測(cè)的輔助之下,有些至今仍必須采用人工插件的作業(yè)程序,也可以改由機(jī)器手臂執(zhí)行。
在高精度插件應(yīng)用方面,由于許多電子終端產(chǎn)品都越來越小巧,因此其連接器跟板卡之間的空隙或公差,也跟著縮小到數(shù)十微米等級(jí)。 在這種情況下,即便用人力來插件,也未必能有很高的作業(yè)效率,因?yàn)榘蹇ǜB接器之間的縫隙太小了,如果插入的方向稍微有點(diǎn)角度偏差,就會(huì)無法插入。
但整合了高精度力覺傳感器的機(jī)器手臂,在夾持工件插入連接器的過程中,會(huì)不斷感測(cè)到接觸面施予工件的反作用力,并藉此不斷調(diào)整其插入的角度,正確地完成插件作業(yè)。 如果在連接器母座上有導(dǎo)角設(shè)計(jì),還可以發(fā)揮引導(dǎo)手臂尋找孔穴的效果,加快組裝作業(yè)的速度。 根據(jù)愛普生的測(cè)試,整合高分辨率力覺傳感器的手臂,即便公頭跟母座間的公差或縫隙只有1條(10微米),也可以順利執(zhí)行插件作業(yè)。
另一個(gè)插件應(yīng)用的案例則是傳統(tǒng)電容的插件作業(yè)。 雖然現(xiàn)在大多數(shù)電子產(chǎn)品已經(jīng)不再采用帶有兩條插腳的傳統(tǒng)電容,改用芯片電容,但由于芯片電容的容值較小,因此某些應(yīng)用還是得采用傳統(tǒng)封裝的大型電容。
就產(chǎn)品組裝來說,要在電路板上正確插入這種電容,最大的挑戰(zhàn)在于電容的接腳既長(zhǎng)又軟,很容易受力變形、歪曲,因此在組裝時(shí),往往還是得用人工插件來安裝這類電容。 然而,在高精度力覺感測(cè)的輔助下,機(jī)器手臂可以先把電容的正極(長(zhǎng)腳)插入電路板上的孔穴,然后再用力覺感測(cè)幫負(fù)極(短腳)尋找到正確的孔穴,完成插件作業(yè)。 只要長(zhǎng)短腳之間的開岔變形在容許范圍內(nèi),手臂就能完成自動(dòng)組裝。
軟性電路板(FPC)、扁平電纜的組裝,目前也大多仍由人工進(jìn)行,因?yàn)檐洶濉⒈馄诫娎|的插件作業(yè)對(duì)力道控制有相當(dāng)?shù)囊?,而且插完后有時(shí)還要稍微回拉,以確定連接器跟扁平電纜/軟板已牢固接合。 若要用機(jī)器手臂執(zhí)行這種需要精準(zhǔn)力道控制的作業(yè),力覺感測(cè)技術(shù)可說是基本配備。
除了這些精密組裝之外,力覺感測(cè)還有其他的應(yīng)用潛力,例如運(yùn)用在軸承跟轉(zhuǎn)軸的組裝,或是工件的拋光處理上。
軸承跟轉(zhuǎn)軸的組裝有時(shí)需要用恒定的力量持續(xù)推動(dòng)轉(zhuǎn)軸,使其穿過軸承,這時(shí)力覺感測(cè)就能派上用場(chǎng)。 在拋光作業(yè)方面,現(xiàn)在普遍的作法是讓手臂夾持著工件,按照固定的路線跟角度,讓工件與砂輪機(jī)產(chǎn)生接觸。 但這種做法無法確定工件跟砂輪機(jī)接觸的力道,當(dāng)砂輪隨著時(shí)間出現(xiàn)磨耗,工件的拋光效果會(huì)慢慢變得不如預(yù)期。 若是有力覺感測(cè)技術(shù)輔助,則工件跟砂輪接觸的力量便可一直保持在恒定狀態(tài)。
慢工出細(xì)活 手臂動(dòng)作速度將受限制
對(duì)制造業(yè)者來說,機(jī)器手臂的動(dòng)作速度越快,則生產(chǎn)線的產(chǎn)能越大,因此制造業(yè)者在使用機(jī)器手臂時(shí),往往會(huì)希望手臂無時(shí)無刻保持全速運(yùn)轉(zhuǎn)狀態(tài)。 然而,如果要用機(jī)器手臂做精密組裝,則手臂運(yùn)作的速度會(huì)受到一定限制,因?yàn)椤嘎こ黾?xì)活」這句話在機(jī)器手臂上面也同樣適用。
對(duì)力覺傳感器來說,手臂運(yùn)動(dòng)所產(chǎn)生的加速度,其實(shí)是一種干擾訊號(hào)。 因此,若想用搭載力覺的手臂來做精密組裝,手臂的加速度不能超過精密組裝所需的力覺分辨率門坎限制。 這也意味著手臂在做精密組裝時(shí),動(dòng)作必然要放慢。 因此,制造業(yè)者若有精密組裝的需求,在此作業(yè)階段可視產(chǎn)能需求,多設(shè)幾個(gè)平行工作站來避免精密組裝成為產(chǎn)線的瓶頸。
另外,將自動(dòng)化生產(chǎn)納入考慮的設(shè)計(jì)觀念(Design for Automation, DfA),在未來也會(huì)越來越受到重視。 一點(diǎn)小小的設(shè)計(jì)變更,就能讓機(jī)器手臂作業(yè)變得更順暢。 DfA是一個(gè)跨部門,跨產(chǎn)業(yè)的議題,需要各方通力合作,才能找到理想的解決方法。
推薦閱讀:


