
【導(dǎo)讀】1960年世界上第一臺紅寶石激光器問世不久,以精密測距為主要功能的激光測距技術(shù)便隨之誕生了。前面我們了解了幾種主要的測距/距離傳感器的原理及特點,其中,激光測距傳感器因其抗干擾能力強,精度高的優(yōu)勢,自誕生以來,得到了極大的發(fā)展,在各行各業(yè)都發(fā)揮著巨大的作用。

第一臺紅寶石激光器
經(jīng)過了50多年的發(fā)展,其發(fā)展大致表現(xiàn)在兩個方面:首先是應(yīng)用各種新技術(shù)和設(shè)備提高測距精度和觀測數(shù)據(jù)量;其次是提高測距系統(tǒng)的自動化程度,減小人力和物力的消耗。具體為:
1、在測距精度上,從最初的米級逐步提高到分米級、厘米級,目前國際上最先進的臺站其測距精度已能達到毫米級。
2、在測距能力上,從最初的最遠1000~2000km提高到2萬km,乃至3.6萬km。激光測月的實現(xiàn)使測距能力達到了38萬km。
3、在測距頻率上,從最初的每秒一次發(fā)展到目前每秒1000~2000次,更高頻率的激光測距(如10kHz測距)也在試驗中。
4、在測距波長上,目前普遍采用的仍是單色測距系統(tǒng),一些臺站也在使用雙色/多色激光測距系統(tǒng)。雙波長激光測距系統(tǒng)不再需要大氣物理參數(shù)和大氣模型的修正,只需測量結(jié)果本身即可修正大氣延遲,就能達到更好的數(shù)據(jù)精度。
5、在自動化程度上,從初期的人工目視跟蹤,發(fā)展到今天計算機控制、自動跟蹤。
激光測距傳感器在宇宙空間探測領(lǐng)域的應(yīng)用

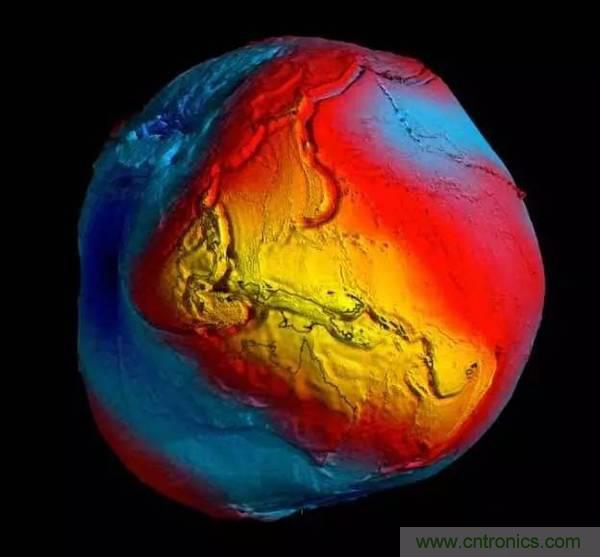
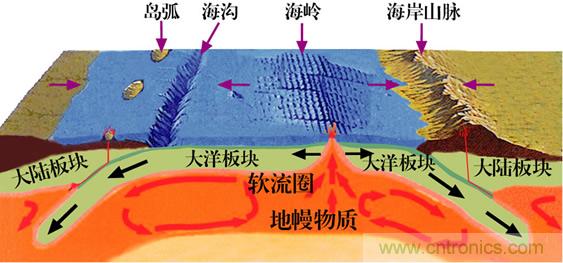
空間激光測距技術(shù)在監(jiān)測大陸板塊運動、地殼形變、地球自轉(zhuǎn),改進地球重力場和地心引力常數(shù),確定地球和海洋潮汐變化的規(guī)律,監(jiān)測空間碎片等方面具有重要作用。它也是當(dāng)前高精度衛(wèi)星精密定位觀測的主要手段之一,是現(xiàn)代各種定位觀測手段中單點采樣精度最高的一種,是支持國際地球自轉(zhuǎn)與參考系服務(wù)(IERS)的技術(shù)手段之一。衛(wèi)星激光測距技術(shù)在如下應(yīng)用方面已經(jīng)取得了顯著的成就,具有廣闊的應(yīng)用前景。
精密測定激光衛(wèi)星的軌道

利用衛(wèi)星的激光觀測數(shù)據(jù)所確定的軌道精度,3天弧段可達1cm;對于徑向定軌精度可達到2~2.5cm。
精確測定地球引力場模型及其時變性
在研究地球質(zhì)心的位置變化過程中,激光技術(shù)測定了目前最準確的地球引力常數(shù)GM,其測定值為:GM=398600.4415km3/s2;利用不同軌道傾角和高度的激光衛(wèi)星,精確測定了地球引力場模型,并且測定了地球引力場低階球諧系數(shù)的季節(jié)性變化;同時還得出了地球質(zhì)心位置的周期性變化,包括季節(jié)性和年際變化,最新的測定值為:J2=-2.6*10-11/年(歷元1986.0);地球引力場的變化反映了地球內(nèi)部及各圈層(包括海洋、大氣、地下水、冰層等)的復(fù)雜運動和相互作用過程,具有重要研究價值。
精確測定地球自轉(zhuǎn)參數(shù)
地球自轉(zhuǎn)參數(shù)(ERP)定義了地球旋轉(zhuǎn)軸和隨時間序列的定向運動以及在天球參考框架中的旋轉(zhuǎn)速度。地球自轉(zhuǎn)參數(shù)包括極移和日長(LOD)變化。利用激光測虎技術(shù)測定的地球極移分量(XP,YP)精度目前已達到0.1~0.2mas;日長(LOD)的測定精度目前已達到0.1ms。

監(jiān)測全球地殼板塊運動
利用激光長期觀測數(shù)據(jù)可以精確地測定地面測站的地心坐標,高精度測站坐標的解算使得人們監(jiān)測板塊運動的愿望成為可能。利用激光測距技術(shù)獲得的數(shù)據(jù),已經(jīng)估計了40多個測站的站速度和站間基線的變化率。如果測站位于板塊的剛性部分,則其站速度就代表了板塊運動。利用測站基線的變化率和站速度可以解算板塊間的相對運動。
高精度海平面和冰蓋地形的測量
激光測距技術(shù)與其他空間技術(shù)(如GNSS、雷達高度計、SAR等)聯(lián)合應(yīng)用,將可能實現(xiàn)毫米級精度的海平面和冰蓋地形的測量。

空間碎片軌道確定和監(jiān)測
利用激光測距技術(shù)可以精確測定空間碎片,確定碎片軌道位置,為空間碎片監(jiān)測和空間碰撞預(yù)警系統(tǒng)提供精密軌道信息。
激光測距傳感器在軍事領(lǐng)域的應(yīng)用
輕型便攜式脈沖激光測距儀
輕型便攜式脈沖激光測距儀包括步兵和炮兵偵察用的手持式以及前沿偵察和前沿對空控制(FAC)雙用途的激光測距儀—目標指示器。對上述用途的系統(tǒng),要求機動靈活、重復(fù)輕、體積小、用電池組作電源、可靠性和維修性高以及單一產(chǎn)品的成本低等。

在現(xiàn)代戰(zhàn)爭中,由以前單一的步兵、炮兵獨立作戰(zhàn)發(fā)展到有步兵、炮兵和海軍陸戰(zhàn)隊組成的特種部隊聯(lián)合作戰(zhàn),武器系統(tǒng)也由單一的地炮、高炮逐漸采用多功能綜合高技術(shù)。因此激光測距儀也由單一測距功能的便攜式、手持式發(fā)展到激光測距、紅外瞄準的晝夜觀測儀以及激光測距、目標指示、紅外瞄準的激光紅外目標指示器等。
地面車載脈沖激光測距儀
地面車載脈沖激光測距儀包括坦克、步兵戰(zhàn)車(IFV)、火控、對空防御、火炮或?qū)椫茖?dǎo)火控以及目前發(fā)展的地面車載激光測距儀—目標指示器等。其主要技術(shù)性能:最大測程4~10km,測距精度±5~10m,目標分辨約20m,重復(fù)頻率0.1~1Hz,束散角0.4~1mrad。

激光測距儀在坦克火控系統(tǒng)中的應(yīng)用是提供彈道軌跡的超仰角修正信息和因逆風(fēng)或目標移動引起的方位角校正信息以及距離信息。步兵戰(zhàn)車主要是使用激光測距儀去測量目標是否在反坦克導(dǎo)彈的距離內(nèi),其次用于槍炮火控和對目標的分選。
對空火炮和導(dǎo)彈防御脈沖激光測距儀
對空防御的脈沖激光測距儀以及采用了自保護措施的步兵戰(zhàn)車對空防御脈沖激光測距儀均應(yīng)按火控系統(tǒng)和作戰(zhàn)系統(tǒng)的要求工作,在距離和距離速率以內(nèi)對空中高速機動目標提供穩(wěn)定的跟蹤信息和距離信息,以對抗武裝直升機、隱身飛機和巡航導(dǎo)彈、反輻射導(dǎo)彈的威脅。
這要求激光測距儀提供比較高的數(shù)據(jù)率(高的激光脈沖速率)和相當(dāng)高的距離精度,如最大測程為4~20km,測距精度為±2.5~5m,重復(fù)頻率為6~20Hz,束散角為0.5~2.5mrad等。

機載脈沖激光測距儀
機載脈沖激光測距儀可以用來裝備武裝直升機的導(dǎo)彈指令制導(dǎo)和裝備固定翼飛機,用于封鎖支援的光電飛行器等目標以及攔截飛機和導(dǎo)彈的攻擊。
機載脈沖激光測距儀的主要技術(shù)性能:測程遠、測距精度高、重復(fù)頻率高、束散角小,同時機載設(shè)備應(yīng)體積小、重量輕并要與航空指示器共用。
因此,激光器必須使用高效循環(huán)液體作冷卻器,以適應(yīng)高的運轉(zhuǎn)速率要求,否則要采用氣體或混合氣體升壓冷卻。

艦載脈沖激光測距儀
艦載脈沖激光測距儀的發(fā)展在輕型便攜式、車載和對空防御激光測距儀之后,它包括水面艦載和潛艇潛望兩大類。
水面艦載脈沖激光測距儀在技術(shù)性能指標方面與車載火控和對空防御激光測距儀相同,在環(huán)境使用方面要適應(yīng)艦載??铡⒑C嬉约昂I消}霧的荷刻要求,而在體積、重量、電效率、維護保養(yǎng)能力和成本等方面的要求又不苛刻。
因此,目前大量用來裝備常規(guī)火控和對空防御的海軍艦只,如掩護(無聲雷達)艦載飛機回收和與紅外熱成像、電視等組成跟蹤系統(tǒng),全天候監(jiān)視和跟蹤空中目標等獨特的艦上應(yīng)用正在出現(xiàn),其應(yīng)用前景相當(dāng)廣泛。

潛艇潛望脈沖激光測距儀目前采用兩種組合方式,第一種將激光測距儀、圖像增強器和熱成像儀裝于其潛望鏡中,而距離顯示器、觸發(fā)按鈕等分別裝于操作手上方或附近。
其優(yōu)點是傳輸光路中激光損耗小,但光束飄移,不易捕獲目標;第二種將上面三部分均裝在潛望鏡底部,整個系統(tǒng)的安裝,調(diào)試、拆卸均很方便,但采用這種方法的激光束要通過12m長的潛望鏡管和15~20塊透鏡,能量損耗較大。
云高脈沖激光測距儀
利用脈沖激光測距儀來測量云層垂直高度的儀器稱為云高激光測距儀。這類激光測距儀主要用來測量機場的云層高度,也可用來測量衛(wèi)星發(fā)射點的云層高度,為飛機的起降或衛(wèi)星發(fā)射提供安全的氣象數(shù)據(jù)。
這類脈沖激光測距儀可以為前沿軍事基地、機場或軍用衛(wèi)星發(fā)射點(近距離)的安全提供可靠的氣象數(shù)據(jù),是現(xiàn)代戰(zhàn)爭不可缺少的儀器;若使用它為大型國際機場、小型商業(yè)民用機場和民用通信衛(wèi)星發(fā)射點(近距離)提供飛機起降或衛(wèi)星發(fā)射的安全氣象數(shù)據(jù),將對國民經(jīng)濟建設(shè)和提高國際信譽產(chǎn)生巨大的經(jīng)濟效益和社會效益。

激光測距傳感器在智能交通領(lǐng)域的應(yīng)用
激光測距技術(shù)在物聯(lián)網(wǎng)智能交通中的一些可能應(yīng)用方向,主要包括:激光測速傳感器、汽車防撞系統(tǒng)、車流量監(jiān)控、車型描畫、車輛行人違法監(jiān)測以及其他一些精密監(jiān)控測量中的應(yīng)用等。
汽車防撞探測器

一般來說,大多數(shù)現(xiàn)有汽車碰撞預(yù)防系統(tǒng)的激光測距傳感器使用激光光束以不接觸方式用于識別汽車在前或者在后形勢的目標汽車之間的距離,當(dāng)汽車間距小于預(yù)定安全距離時,汽車防碰撞系統(tǒng)對汽車進行緊急剎車,或者對司機發(fā)出報警,或者綜合目標汽車速度、車距、汽車制動距離、響應(yīng)時間等對汽車行駛進行即時的判斷和響應(yīng),可以大量的減少行車事故。在高速公路上使用,其優(yōu)點更加明顯。
車流量監(jiān)控及車輪廓描畫
這種使用方式一般固定到高速或者重要路口的龍門架上,激光發(fā)射和接收垂直地面向下,對準一條車道的中間位置,當(dāng)有車輛通行時,激光測距傳感器能實時輸出所測得的距離值的相對改變值,進而描繪出所測車的輪廓。
這種測量方式一般使用測距范圍小于30米即可,且要求激光測距速率比較高,一般要求能達到100赫茲就可以了。
這對于在重要路段監(jiān)控可以達到很好的效果,能夠區(qū)分各種車型,對車身高度掃描的采樣率可以達到10厘米一個點。對車流限高,限長,車輛分型等都能實時分辨,并能快速輸出結(jié)果。

在沒有車輛到來時,激光測距傳感器測出的是一個距離常量,也就是激光測距傳感器到地的距離,當(dāng)有車輛從激光測距傳感器下面經(jīng)過時,距離值改變,當(dāng)距離值再次回到常量就認為有一輛車通過,根據(jù)這種方式我們可以對通過一些路段的車流量進行監(jiān)控。
現(xiàn)在常用的方法是對一段時間內(nèi)的車流進行統(tǒng)計平均的方法,帶有很大的估計成分,而視頻統(tǒng)計的方法還有很多現(xiàn)實應(yīng)用的困難,因此,激光測距統(tǒng)計方法為車流量統(tǒng)計提供了一種可行的方案。
車輛行人違法監(jiān)測

由于激光測距傳感器的光束不是實質(zhì)性的障礙,在利用激光測距傳感器對路面進行監(jiān)控的時候,并不會阻礙交通的正常運行。
因此,在一些禁?;蛘呓剐腥塑囕v通行的路段,用激光束平行路面以一定高度進行固定發(fā)射或者以一定角度進行掃描,當(dāng)遇到有車輛違法停車闖紅燈或者行人違法跨越護欄等,激光測距距離值改變,可以進行報警或者警示。
這種應(yīng)用光束不必要太寬,但一般要求測距距離比較長,以確保一定路段長度的防護距離。這種方式構(gòu)成的智能交通違法監(jiān)控系統(tǒng)將在交通物聯(lián)網(wǎng)中得到很大的應(yīng)用。
激光測速傳感器
激光測距傳感器是激光測距技術(shù)在交通管理領(lǐng)域最早的一種形式,因為其卓越的性能,在實際應(yīng)用中逐漸得到普及。激光測距傳感器是采用激光測距的原理,是對被測物體進行兩次有特定時間間隔的激光測距,取得在此時間間隔內(nèi)被測物體的距離變化,從而得到該被測物體的移動速度。
激光測速儀分為固定式的和移動式兩種,固定式的一般固定在路邊或者龍門架上,以一個比較小的角度迎向來車,一般通過車牌反射進行測量,測量精度比較高,可以達到±1公里/小時,測速范圍可達250公里/小時,測距范圍在此應(yīng)用中不用太大,一般80到100米即可。
移動式激光測速儀對操作要求比較高,一般光束發(fā)散角度要大于3 mrad,鑒于激光測速的原理,激光光束必須要瞄準垂直與激光光束的平面反射點,又由于車輛處于移動狀態(tài),車體平面不大,且測速需要一定時間,只能作為臨時測速,取證應(yīng)用。
激光測距傳感器由于光束發(fā)散角度較小,便于測速取證,不像雷達多普勒測速儀,在多車道測量時不能確知超速的具體車輛,且由于激光測速傳感器發(fā)射的是近紅外的光波,不能被雷達探測器、電子狗等探側(cè),且不易受市區(qū)雷達雜波干擾。

在當(dāng)下最火熱的無人駕駛領(lǐng)域,也是激光測距傳感器大顯身手的地方
谷歌的無人駕駛汽車一個“突出”的特點就是其車頂上方的旋轉(zhuǎn)式激光測距儀,該測距儀能發(fā)出 64 道激光光束,幫助汽車識別道路上潛在的危險。該激光的強度比較高,能計算出 200 米范圍內(nèi)物體的距離,并借此創(chuàng)建出環(huán)境模型。

谷歌無人汽車
據(jù)負責(zé)無人駕駛汽車項目的總工程師Sebatian Thrun介紹,整個系統(tǒng)的核心是車頂上的激光測距儀(Velodyne 64-beam)。該設(shè)備在高速旋轉(zhuǎn)時向周圍發(fā)射64束激光,激光碰到周圍的物體并返回,便可計算出車體與周邊物體的距離。
計算機系統(tǒng)再根據(jù)這些距離數(shù)據(jù)描繪出精細的 3D 地形圖,然后跟高分辨率地圖相結(jié)合,生成不同的數(shù)據(jù)模型供車載計算機系統(tǒng)使用。

汽車頂部的激光測距儀是整套系統(tǒng)的核心
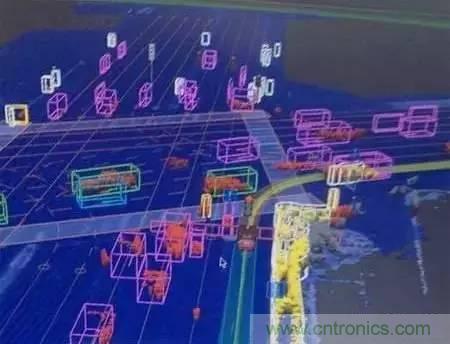
無人駕駛系統(tǒng)描繪出的3D地形圖
總結(jié)
實際上,激光測距傳感器的運用范圍遠不至上述這些,它還被廣泛應(yīng)用于:電力,水利,通訊,環(huán)境,建筑,地質(zhì),警務(wù),消防,爆破,航海,鐵路,反恐/軍事,農(nóng)業(yè),林業(yè),房地產(chǎn),休閑/戶外運動等各個領(lǐng)域。
目前激光測距技術(shù)越來越朝著小型化、結(jié)構(gòu)簡單、高精度、高適用范圍的方向發(fā)展,特別是隨著數(shù)字處理技術(shù)的發(fā)展,激光測距技術(shù)將變的更加完善。如先進的背景抑噪技術(shù)和三角測量技術(shù)的引入,可以使激光測距傳感器在更加復(fù)雜的情況下更好地工作。我們相信,隨著技術(shù)的發(fā)展,激光測距傳感器及激光測距技術(shù)一定會得到越來越廣泛的應(yīng)用。
本文來源于傳感器技術(shù)。
推薦閱讀:



