

【導讀】手勢識別對于我們來說并不陌生,手勢識別技術(shù)很早就有,目前也在逐漸成熟,現(xiàn)在大部分消費類應用都在試圖增加這一識別功能,無論是智能家居,智能可穿戴以及VR 等應用領域,增加了手勢識別控制功能,必能成為該應用產(chǎn)品的一大賣點。手勢識別可以帶來很多的好處,功能炫酷,操作方便,在很多應用場合都起到了良好的助力功能。
手勢識別技術(shù)的發(fā)展
說起手勢識別技術(shù)的發(fā)展,可以粗略分為兩個階段:二維手勢識別以及三維手勢識別。
早期的手勢識別識別是基于二維彩色圖像的識別技術(shù),所謂的二維彩色圖像是指通過普通攝像頭拍出場景后,得到二維的靜態(tài)圖像,然后再通過計算機圖形算法進行圖像中內(nèi)容的識別。二維的手型識別的只能識別出幾個靜態(tài)的手勢動作,而且這些動作必須要提前進行預設好。
相比較二維手勢識別,三維手勢識別增加了一個Z軸的信息,它可以識別各種手型、手勢和動作。三維手勢識別也是現(xiàn)在手勢識別發(fā)展的主要方向。不過這種包含一定深度信息的手勢識別,需要特別的硬件來實現(xiàn)。常見的有通過傳感器和光學攝像頭來完成。
手勢識別的關鍵技術(shù)
手勢識別中最關鍵的包括對手勢動作的跟蹤以及后續(xù)的計算機數(shù)據(jù)處理。關于手勢動作捕捉主要是通過光學和傳感器兩種方式來實現(xiàn)。手勢識別推測的算法,包括模板匹配技術(shù)(二維手勢識別技術(shù)使用的)、通過統(tǒng)計樣本特征以及深度學習神經(jīng)網(wǎng)絡技術(shù)。

根據(jù)硬件實現(xiàn)方式的不同,目前行業(yè)內(nèi)所采用的手勢識別大約有三種:
1、結(jié)構(gòu)光(Structure Light),通過激光的折射以及算法計算出物體的位置和深度信息,進而復原整個三維空間。結(jié)構(gòu)光的代表產(chǎn)品有微軟的Kinect一代。不過由于以來折射光的落點位移來計算位置,這種技術(shù)不能計算出精確的深度信息,對識別的距離也有嚴格的要求。
2、光飛時間(TIme of Flight),加載一個發(fā)光元件,通過CMOS傳感器來捕捉計算光子的飛行時間,根據(jù)光子飛行時間推算出光子飛行的距離,也就得到了物體的深度信息。代表作品為Intel帶手勢識別功能的三維攝像頭。
3、多角成像(MulTI-camera),現(xiàn)在手勢識別領域的佼佼者Leap MoTIon使用的就是這種技術(shù)。它使用兩個或者兩個以上的攝像頭同時采集圖像,通過比對這些不同攝像頭在同一時刻獲得的圖像的差別,使用算法來計算深度信息,從而多角三維成像。
簡單介紹兩個手勢識別解決方案:
1、基于NXP LPC824 和 Vishay VCNL4020 的手勢識別方案
推出基于NXP LPC824 和 Vishay VCNL4020 的手勢識別方案,可以判斷手勢運動的方向。
功能框圖
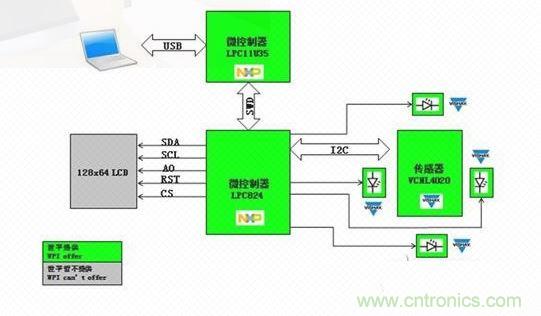
功能描述
① 手勢識別,LCD 顯示手勢運動方向
?、?兼容 arduino 接口
?、?VCNL4020 感應光線強度變化
?、?集成調(diào)試器,無需第三方調(diào)試器
重要特征
?、?VSMF2890RGX01 發(fā)射紅外光
?、?LPC824M201JHI33 運行手勢識別算法
?、?LPC11U35FHI33 為調(diào)試器
2、基于PAJ7620U2智能隔空手勢解決方案
原相科技(Pixart)為CMOS光感應用集成電路領導廠商,產(chǎn)品特點為低功耗、準確性、小尺寸及低成本。
功能框圖
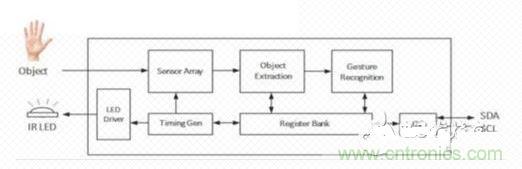
PAJ7620U2是一種光學數(shù)組式傳感器,以使復雜的手勢和光標模式輸出。
主要特征
•內(nèi)置光源和環(huán)境光抑制濾波器 集成的LED,鏡頭和手勢傳感器在一個小的立方體模塊。能在黑暗或低光環(huán)境下工作,減少環(huán)境光干擾。
•內(nèi)置手勢識別支持9個手勢類型和輸出的手勢中斷和結(jié)果,大大節(jié)省了系統(tǒng)的電源。
•支持率為240Hz的報告可程序設計手勢中斷喚醒系統(tǒng)。
產(chǎn)品應用
后視鏡、車載中控、HUD、智能眼鏡、機器人、VR、幼教類產(chǎn)品。。等等。



