

【導(dǎo)讀】本文詳解控制理論。通常我們在講解控制理論時,都只通過框圖,而不參考實際的電路。在數(shù)學(xué)和電路仿真工具的幫助下,我們將一步步說明電子控制理論與現(xiàn)代電路設(shè)計息息相關(guān)。
簡介
大學(xué)教授的許多科目都會令學(xué)生發(fā)問:"學(xué)習(xí)這門課程能讓我找到一份工作嗎?"控制理論可能就是這樣一門課程,這些多達(dá)數(shù)頁的數(shù)學(xué)和框圖不會在實際電路中被直接使用。但是,控制系統(tǒng)教授工程師如何設(shè)計自動系統(tǒng)、系統(tǒng)距離實現(xiàn)穩(wěn)定操作還有多大距離,以及如何從給定系統(tǒng)獲得最佳響應(yīng)。因為不管課程是關(guān)于機(jī)械、電氣、土木、航空,或者是通信工程,如果系統(tǒng)不穩(wěn)定,一切都沒有用。
對于設(shè)計工程師來說,控制理論就是生命本身。
現(xiàn)在有許多關(guān)于控制理論的優(yōu)秀文章,但是其中很多都是借助框圖,以最概括化的方法來進(jìn)行介紹。本文主要面向電子工程師,從電路分析和仿真的角度介紹電子控制系統(tǒng);介紹了常見的二階系統(tǒng)背后的理論,而且是利用有效的電路示例來加以說明;旨在揭露二階系統(tǒng)的基礎(chǔ)原理,并向嘗試了解電子控制理論的人員說明,該理論與模擬電路設(shè)計之間存在關(guān)聯(lián)。
二階系統(tǒng)
圖1所示為最基礎(chǔ)的二階網(wǎng)絡(luò)。
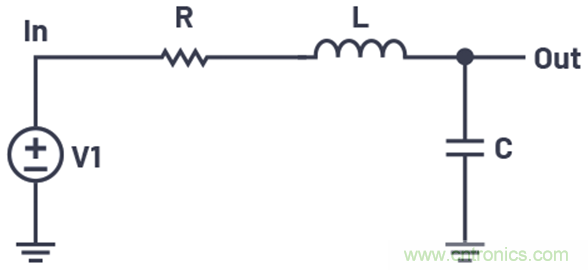
圖1.由一個電阻、一個電感和一個電容構(gòu)成的二階網(wǎng)絡(luò)。
其傳遞函數(shù)為:

方程1右側(cè)的分母被稱為 特征多項式 ,如果我們令特征多項式為0,我們會得出 特性方程。當(dāng)轉(zhuǎn)換函數(shù)的分母等于0時,得到系統(tǒng)的極點 通過求解特性方程的根(讓特性方程等于0的s的值),我們可以找到系統(tǒng)的極點,從而獲取與系統(tǒng)運行狀況相關(guān)的許多信息。
二階系統(tǒng)傳遞函數(shù)的一般形式為:
其中ζ表示阻尼系數(shù),ωn表示電路的固有振蕩頻率(或無阻尼頻率),單位為弧度/秒。
所以,二階系統(tǒng)的一般特性方程為:
比較方程3和方程1,我們可以看出,圖1中的電路的固有頻率為:
我們也可以看出,電路中的電阻會影響網(wǎng)絡(luò)的阻尼系數(shù):
所以
所以
可以直觀看出,如果電路中沒有電阻,網(wǎng)絡(luò)不會出現(xiàn)耗損(無阻尼),如果模擬這種電路,則電路會永久振蕩。隨著電阻增加,振蕩會更快衰減。
圖2顯示一個RLC電路,其中階躍輸入為1 V,L = 1 µH,C = 1 µF,電阻分別為0 Ω、100 mΩ和500 mΩ。電路按照預(yù)期的159 kHz頻率振蕩。電阻增加對衰減的影響一目了然。
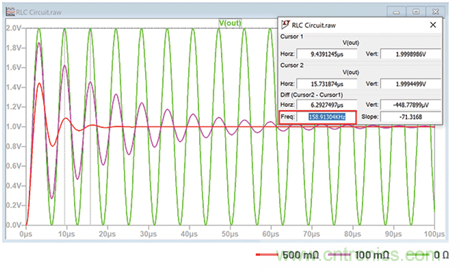
圖2.電阻對網(wǎng)絡(luò)振蕩的衰減影響。
我們可以通過將拉普拉斯域轉(zhuǎn)換為時域,以數(shù)學(xué)方式展示圖2所示的模擬結(jié)果。拉普拉斯域中的單位階躍輸入寫為:
所以當(dāng)我們使用單位階躍輸入仿真二階系統(tǒng)時,結(jié)果會變成:
如果使用部份分式分解法,方程9可以寫為:
方程10是表示在拉普拉斯域中的。
在時域中,這會轉(zhuǎn)換為:
其中
采用逆拉普拉斯變換的公式11的數(shù)學(xué)推導(dǎo)如 附錄A所示。
通過公式11,我們可以看出圖1的電路如何響應(yīng)階躍輸入。我們可以看到,波形具有與正弦曲線類似的特性,其幅度則由e–ζωnt項調(diào)制,根據(jù)阻尼系數(shù)是正數(shù)或復(fù)數(shù)出現(xiàn)指數(shù)式衰減或增加。近似來看,響應(yīng)由正弦部分和余弦部分組成,但是,阻尼系統(tǒng)較低時,正弦部分非常小。
此外,盡管電路的固有頻率為ωn,但電路不會按照此頻率振蕩,而是按照更低一些的頻率ωdn決定。
要找出轉(zhuǎn)換函數(shù)的極點,則需要確定轉(zhuǎn)換函數(shù)何時等于0,也就是說:
s的值可以使用二次方程求解:
其中
要得出系統(tǒng)極點,需要:
如果阻尼系數(shù)小于1,會得出負(fù)的平方根,所以最好將方程15寫作:
我們之前說過 ωd = ωn√(1 – ζ2),所以方程16可以改寫為:
這里我們可以看出,系統(tǒng)的極點包含實數(shù)部分(–ζωn) 和虛數(shù)部分 (±jωd)。
方程17可以求解得出特性方程的根(系統(tǒng)的極點)。我們?nèi)绾螌⑦@些極點與系統(tǒng)的穩(wěn)定性聯(lián)系起來?現(xiàn)在我們需要把拉普拉斯域的極點和時域的穩(wěn)定性聯(lián)系起來。
通過方程11和方程17,我們可以得出以下觀察結(jié)果。
無阻尼固有頻率ωn決定了:
拉普拉斯域(方程17)中的極點 (–ζωn)的虛數(shù)部分。
振蕩的實際頻率
由此,可以合理假設(shè)極點的虛數(shù)部分確定了系統(tǒng)振蕩的實際頻率。
這兩個假設(shè)可以用s平面圖表示,我將在下一節(jié)詳細(xì)介紹。
穩(wěn)定的系統(tǒng)
控制理論認(rèn)為,如果極點位于s平面的左半部分,則系統(tǒng)是穩(wěn)定的。圖3所示為一個s平面示例,其中實數(shù)部分在x軸上繪制,虛數(shù)部分在y軸上繪制。
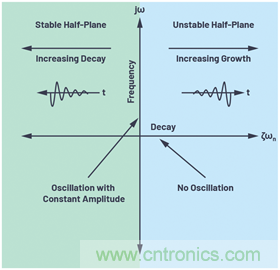
圖3.s平面:顯示穩(wěn)定的左半部分和不穩(wěn)定的右半部分。
從方程17可以看出,如果阻尼系數(shù)為正(方程17的實數(shù)部分為負(fù)),則極點位于左半部分。隨著阻尼系數(shù)增加,方程17的極點進(jìn)一步向左移動(在左側(cè)平面內(nèi),越來越靠近左側(cè))。
如果方程17在拉普拉斯域中,如何在時域中轉(zhuǎn)換?
為了方便起見,我們再次使用方程11:
正阻尼系數(shù)ζ會引發(fā)指數(shù)式的衰減幅度響應(yīng)(由e–ζωnt項表示),阻尼越大,衰減越快。隨著阻尼系數(shù)增加,極點進(jìn)一步向左移動(在拉普拉斯域內(nèi)),這進(jìn)一步增大了時域內(nèi)的指數(shù)式衰減。從圖2中可以看出這一點,圖2使用100 mΩ和500 mΩ線路來表述電阻對阻尼的影響。在此區(qū)域中,500 mΩ線路的阻尼系數(shù)最大,所以它的指數(shù)式衰減最明顯。0 Ω時,阻尼系數(shù)為0,此時極點完全位于y軸上,電路無限振蕩,如圖2中的綠色線路所示。
值得注意的是,即使系統(tǒng)是穩(wěn)定的,這并不表示一定沒有振蕩。電路可能會在左半平面的極點處振蕩,但是這些振蕩的振幅會隨著時間而衰減,如圖2所示。
這對圖1中的電路意味著什么?
我們知道圖1中的阻尼是通過下方的方程得出:
它的固有頻率則是:
所以,在L = 1 µH,C = 1 µF時,固有頻率為1 Mrads–1 (= 159.1 Hz),R = 500 mΩ時的阻尼系數(shù)為0.25。
所以,阻尼振蕩頻率ωd由以下方程計算得出:
所以,阻尼振蕩頻率為968 krads–1,即154 kHz。這可以通過查看圖4中紅色波形的頻率來說明。
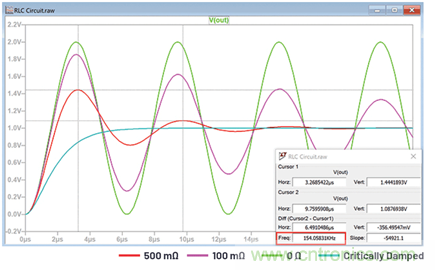
圖4.阻尼對RLC電路振幅和頻率的影響。
正弦波的振幅按e–ζωnt衰減。阻尼系數(shù)為0.25,固有頻率ωn為1 Mrads–1,阻尼固有頻率為968246 rads–1,那么方程11變成:
使用這個公式,計算得出VOUT在3.26 μs時為1.44 V,在9.75 μs時為1.09 V,與圖4中顯示的讀數(shù)完全一致。
圖4清楚顯示了增加阻尼系數(shù)會產(chǎn)生的影響,即振幅和阻尼固有頻率都減小。
如果我們繼續(xù)增大阻尼系數(shù),會出現(xiàn)什么結(jié)果?
我們知道阻尼固有頻率是通過以下方程計算得出:
當(dāng)阻尼系數(shù)增大到一時,阻尼固有頻率減小到零。這就是所謂的臨界阻尼點,此時電路中的所有振蕩終止。這一點可參見方程11。自阻尼固有頻率ωd減小到0,正弦項等于0,余弦項目等于一,表達(dá)式簡化為一階系統(tǒng),與通過電阻充電的電容完全一樣。
這一點可以參見圖4中的臨界阻尼線路。
不穩(wěn)定系統(tǒng)
由于所有電路都具有電阻,所以許多電子控制電路的極點都位于左半平面,且系統(tǒng)本身保持穩(wěn)定。但是,由方程11可以看出,負(fù)阻尼系數(shù)會導(dǎo)致振幅響應(yīng)呈指數(shù)增長,所以極點位于右半平面會導(dǎo)致系統(tǒng)不穩(wěn)定。在電路模擬中,通過插入負(fù)電阻,可以很容易看出右半平面的影響。圖5顯示RLC電路,其電阻為負(fù)。
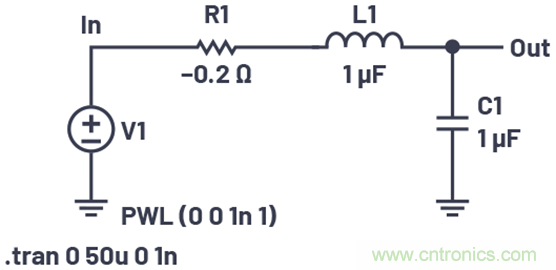
圖5.電阻為負(fù)的RLC電路。
該電路的阻尼系數(shù)為-0.1。圖6顯示了它對階躍輸入的響應(yīng)。
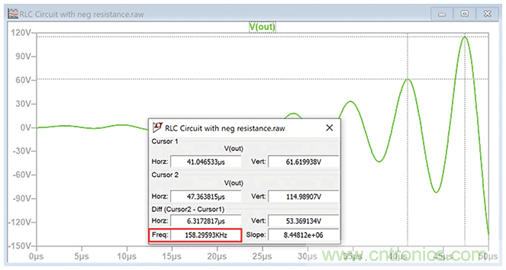
圖6.阻尼為負(fù)的二階系統(tǒng)的階躍響應(yīng)。
阻尼固有頻率仍然由以下方程表示:
阻尼系數(shù)為-0.1時,振蕩的實際頻率為994987 rads–1 (158.3 kHz)。
同樣,從方程11可以看出電路響應(yīng)由以下公式表示:
在輸出增大時,我們可以得出振幅響應(yīng):VOUT在41.05 μs時,計算得出的值為61.62 V,在47.36 μs時,為114.99 V,與圖6中所示的讀數(shù)完全一致。
主導(dǎo)極點
有時一個系統(tǒng)由許多極點組成,使分析變得復(fù)雜。但是,如果極點之間相隔的距離足夠大,那么一個極點產(chǎn)生的影響會占主導(dǎo),因此可以忽略非主導(dǎo)極點,從而簡化系統(tǒng)。
圖7的上半部分顯示了兩個RLC電路,每個都使用完全相同的L和C元件;只是電阻發(fā)生了變化。電阻較低的電路的極點更靠近s平面的虛數(shù)軸。
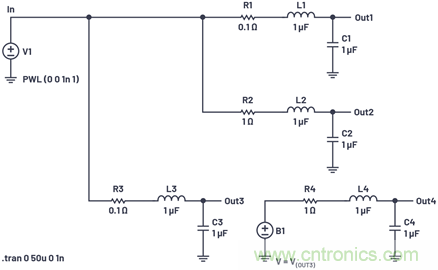
圖7.主導(dǎo)極點的位置對串聯(lián)和并聯(lián)電路的影響。
圖7的下半部分顯示了這兩個電路的串聯(lián)。我們使用行為電壓源B1來復(fù)制V(OUT3),以免它被R4、L4和C4加載,以便我們查看V(OUT3) × V(OUT4)的真實響應(yīng)。
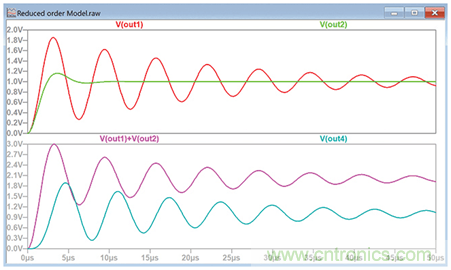
圖8.當(dāng)兩個波形相加或相乘時,主導(dǎo)極點對系統(tǒng)響應(yīng)的影響。
我們可以參考圖8查看它們的響應(yīng)。不出所料,電阻最大的電路具有最大的阻尼系數(shù),因此其振蕩衰減也最快,如圖V(OUT2)所示。但是,我們注意到,當(dāng)兩個輸出要么相加(使電路并聯(lián)),要么相乘(使電路串聯(lián))時,V(OUT1)在響應(yīng)中占主導(dǎo)。因此,要簡化復(fù)雜的系統(tǒng),方法之一是重點關(guān)注極點更靠近jω軸的電路,該電路會主導(dǎo)整個系統(tǒng)的響應(yīng)。
在左右半面均有極點分布的系統(tǒng)
我們已經(jīng)考慮過極點位于左半平面或右半平面的系統(tǒng)。如果系統(tǒng)在左右半面均有極點分布,會怎么樣?哪一種在穩(wěn)定性方面更勝一籌?為什么?
我們再次參考方程11,可以看出指數(shù)是決定系統(tǒng)是否穩(wěn)定的決定因素。我們可以忽略方程11的正弦部分,只看指數(shù),以了解如果我們將左半面的極點和右半面的極點結(jié)合,會發(fā)生什么。圖9通過一個簡單電路來進(jìn)行演示。
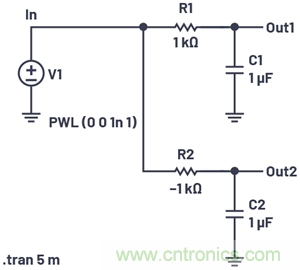
圖9.極點分別位于左半面和右半面的電路。
很顯然,頂部的RC電路的極點位于左半面,因為它的電阻為正。底部電路的極點則位于右半面。得出此結(jié)論的數(shù)學(xué)推導(dǎo)如 附錄B所示。
圖9中,電路的響應(yīng)如圖10所示。
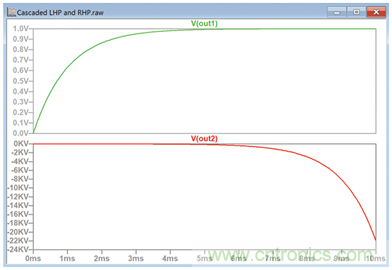
圖10.對具有正負(fù)電阻的RC電路的階躍輸入的響應(yīng)。
頂部波形在大約5毫秒后穩(wěn)定在零梯度,這符合大眾接受的規(guī)則,即RC電路將穩(wěn)定在大約5個時間常數(shù)。相反,V(OUT2)的梯度不斷增加。現(xiàn)在可以明顯看出,如果將極點位于左半面的電路和極點位于右半面的電路串聯(lián),那么整個電路會不穩(wěn)定,這是因為在左半面電路穩(wěn)定很長時間后,右半面電路的響應(yīng)會繼續(xù)呈指數(shù)上升。因此,為了讓電路穩(wěn)定,所有極點都必須位于左半面。
結(jié)論
本文將電子控制理論中使用的理論模型與電子工程師所處的現(xiàn)實聯(lián)系起來。受系統(tǒng)中的電阻(或阻尼)影響,只有當(dāng)所有極點都位于左半面時,控制系統(tǒng)才會保持穩(wěn)定。對于極點位于右半面的系統(tǒng),通過測量其輸出響應(yīng),結(jié)果證實存在問題,因為這需要構(gòu)建負(fù)電阻模型。幸好,計算機(jī)模擬幫我們解決了這個問題,讓我們能夠通過簡單變更電阻的極性來展示穩(wěn)定和不穩(wěn)定的電路。
同樣,拉普拉斯變換也很少在課堂之外出現(xiàn),但在驗證二階電子系統(tǒng)如何工作時,它們的作用可謂是無價的。
附錄A
顯示

單位階躍輸入的拉普拉斯變換為
二階低通濾波器的通用轉(zhuǎn)換函數(shù)為
所以,由單位階躍模擬的二階系統(tǒng)的響應(yīng)為
使用了標(biāo)準(zhǔn)的部份分式分解法,方程如下:
用s代替x之后,
在A4中,分子中不含s或s2。而且,分母中也不含a。
所以方程A6可以改寫為
因此
為保證方程A8兩邊的分母相同,可以將其改寫為
為了驗證,可以將方程A9的右側(cè)與方程A8的右側(cè)進(jìn)行比較:

現(xiàn)在,我們可以使方程A9的分母相等,以求解A、B和C:
s2的系數(shù)相等:
0 = A + B
s1:的系數(shù)相等:
0 = A(2ζωn) + C
s0:的系數(shù)相等:
ωn 2 = Aωn 2
所以A = 1, B = –1, C = –2ζωn
因此,通過方程A8可以得出
(注意符號的變化,因為B和C都為負(fù))
從時域(左邊)到拉普拉斯域(右邊)有三次變換:

通過完成平方計算,我們可以把方程A12寫為
等于
我們現(xiàn)在需要讓分子等于 (s + 2ζωn) ,使其與分母中的第一項匹配,以便我們使用拉普拉斯定義:
因此,通過將ζωn分子項分解為分式,方程A15等于
(所以, a = –ζωn b = ωn√(1 – ζ2))
我們現(xiàn)在需要讓方程A17的第三個項等于ωn√(1 – ζ2) ,使其和分母匹配,以便我們使用拉普拉斯定義:
用方程A17的第三個項除以 ωn√(1 – ζ2),然后將 ωn√(1 – ζ2)放在分子位置。
那么整個方程可以改寫為

所以 a = –ζωn b = ωn√(1 – ζ2)
方程A19現(xiàn)在可以從拉普拉斯域中轉(zhuǎn)變?yōu)?/div>













第三項中取消了兩個wn。因為阻尼固有頻率ωd可以寫為
方程A21可以簡化為
許多課本中提到,方程A21的多項式也可以寫為
所以我們的衰減指數(shù)由阻尼系數(shù)和無阻尼固有頻率決定,振蕩由阻尼固有頻率決定。
可以將方程A23輸入電子表格和表示輸出與階躍輸入之間關(guān)系的圖表中。
附錄B
顯示
單位階躍輸入的拉普拉斯變換為
RC電路的通用轉(zhuǎn)換函數(shù)為:
s為負(fù)值時,分母為零,所以這個電路的極點位于左半面上,因此系統(tǒng)是穩(wěn)定的。如果電阻為負(fù),那么極點位于右半面,系統(tǒng)會不穩(wěn)定。
從方程B3可以看出,RC電路的轉(zhuǎn)換函數(shù)與階躍輸入之間的關(guān)系為
使用了標(biāo)準(zhǔn)的部份分式法,方程如下:
在本例中,a = 0
所以
分子中s1 的相等項為
0 = ACR + B
分子中 s0的相等項為
1 = A
所以 A = 1, B = –CR
因此
從時域(左邊)到拉普拉斯域(右邊)有兩次變換:
將方程B7轉(zhuǎn)化為采用時域意味著RC按照預(yù)期
進(jìn)行響應(yīng)。
附錄
下載與本文相關(guān)的 LTspice® files 文件。
欲了解有關(guān)LTspice的更多信息,請訪問analog.com/ltspice。
參考電路
Charles Phillips、Royce Harbor。《反饋控制系統(tǒng)》,第4版。Prentice Hall International,1988年。.
致謝
我們采用 LTspice進(jìn)行模擬。
非常感謝倫敦布魯內(nèi)爾大學(xué)的Maysam Abbod為本文實施理論校正。
推薦閱讀:

