【導(dǎo)讀】步進(jìn)電機(jī)開環(huán)控制系統(tǒng)中,如何防止失步和過沖是開環(huán)控制系統(tǒng)能否正常運(yùn)行的關(guān)鍵。所以能準(zhǔn)確掌握步進(jìn)電機(jī)升降速曲線控制方法也是不容小覷的。本文就為大家詳解。
在一些控制簡單或要求低成本的運(yùn)動(dòng)控制系統(tǒng)中,經(jīng)常用步進(jìn)電機(jī)做執(zhí)行元件。步進(jìn)電機(jī)在這種應(yīng)用場合下最大的優(yōu)勢是:可以開環(huán)方式控制而無需反饋就能對位置和速度進(jìn)行控制。但也正是因?yàn)樨?fù)載位置對控制電路沒有反饋,步進(jìn)電機(jī)就必須正確響應(yīng)每次勵(lì)磁變化。如果勵(lì)磁頻率選擇不當(dāng),電機(jī)不能夠移到新的位置,那么實(shí)際的負(fù)載位置相對控制器所期待的位置出現(xiàn)永久誤差,即發(fā)生失步現(xiàn)象或過沖現(xiàn)象。因此步進(jìn)電機(jī)開環(huán)控制系統(tǒng)中,如何防止失步和過沖是開環(huán)控制系統(tǒng)能否正常運(yùn)行的關(guān)鍵。
失步和過沖現(xiàn)象分別出現(xiàn)在步進(jìn)電機(jī)啟動(dòng)和停止的時(shí)候。一般情況下,系統(tǒng)的極限啟動(dòng)頻率比較低,而要求的運(yùn)行速度往往比較高。如果系統(tǒng)以要求的運(yùn)行速度直接啟動(dòng),因?yàn)樵撍俣纫殉^極限啟動(dòng)頻率而不能正常啟動(dòng),輕則可能發(fā)生丟步,重則根本不能啟動(dòng),產(chǎn)生堵轉(zhuǎn)。系統(tǒng)運(yùn)行起來以后,如果達(dá)到終點(diǎn)時(shí)立即停止發(fā)送脈沖串,令其立即停止,則由于系統(tǒng)慣性作用,電機(jī)轉(zhuǎn)子會(huì)轉(zhuǎn)過平衡位置,如果負(fù)載的慣性很大,會(huì)使步進(jìn)電機(jī)轉(zhuǎn)子轉(zhuǎn)到接近終點(diǎn)平衡位置的下一個(gè)平衡位置,并在該位置停下。
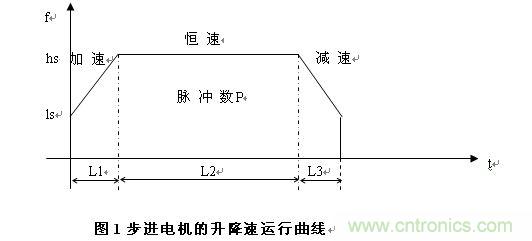
為了克服失步和過沖現(xiàn)象,應(yīng)在步進(jìn)電機(jī)啟停時(shí)進(jìn)行如圖1所示的升降速控制。
從圖1可以看出,L2段為恒速運(yùn)行,L1段為升頻,L3段為降頻,按照“失步”的定義,如果在L1及L3段上升及下降的控制頻率變化大于步進(jìn)電機(jī)的響應(yīng)頻率變化,步進(jìn)電機(jī)就會(huì)失步,失步會(huì)導(dǎo)致步進(jìn)電機(jī)停轉(zhuǎn),經(jīng)常會(huì)影響系統(tǒng)的正常工作,因此,在步進(jìn)電機(jī)變速運(yùn)行中,必須進(jìn)行正確的升降速控制。
以下按不同的控制單元,介紹幾種常用的步進(jìn)電機(jī)升降速控制方法。
1、運(yùn)動(dòng)控制卡作上位控制單元——以MPC01系列運(yùn)動(dòng)卡為例
MPC01系列運(yùn)動(dòng)控制卡可以作為PC機(jī)運(yùn)動(dòng)控制系統(tǒng)的核心控制單元??ㄉ系膶S眠\(yùn)動(dòng)控制芯片可自動(dòng)進(jìn)行升降速計(jì)算。其運(yùn)動(dòng)控制函數(shù)庫中也有專門進(jìn)行梯形升降速運(yùn)動(dòng)參數(shù)設(shè)置的函數(shù)——set_profile(intch,doublels,doublehs,doubleaccel)。其參數(shù)定義如下:
ch:設(shè)定的軸號(hào)。
ls:設(shè)定低速(起始速度)的值。單位為pps(脈沖/秒)
hs:設(shè)定高速(恒速段)的值。單位為pps(脈沖/秒)
accel:設(shè)定加速度大小。單位為ppss(脈沖/秒/秒)
用戶在調(diào)用運(yùn)動(dòng)指令函數(shù)時(shí),只需指定總的脈沖數(shù),運(yùn)動(dòng)控制卡上的專用運(yùn)動(dòng)控制芯片便按照set_profile函數(shù)設(shè)置的運(yùn)動(dòng)參數(shù)自動(dòng)進(jìn)行升降速計(jì)算,而不會(huì)占用PC機(jī)的CPU資源。
2、用具有運(yùn)動(dòng)控制功能的PLC做上位控制單元——以松下FP0系列PLC為例。
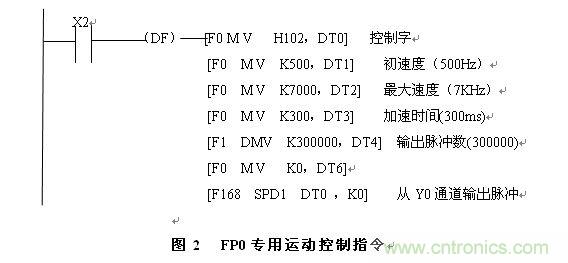
松下FP0系列PLC具有專用的運(yùn)動(dòng)控制指令,其CPU單元可自動(dòng)進(jìn)行圖1所示的升降速計(jì)算。和MPC01系列運(yùn)動(dòng)控制卡相似,用戶只需設(shè)置梯形速度的初速度ls、恒速hs、加速時(shí)間t和所需發(fā)的脈沖數(shù)P。運(yùn)行此程序段,當(dāng)PLC檢測到輸入端X2的一個(gè)上跳變時(shí),便自動(dòng)執(zhí)行如圖1所示的升降速脈沖輸出功能。
3、用單片機(jī)做上位控制單元
采用微機(jī)對步進(jìn)電機(jī)進(jìn)行加減速控制,實(shí)際上就是改變輸出脈沖的時(shí)間間隔,升速時(shí)使脈沖串逐漸加密,減速時(shí)使脈沖串逐漸稀疏。采用定時(shí)器中斷方式控制電機(jī)變速時(shí),實(shí)際上是不斷改變定時(shí)器裝載值的大小。
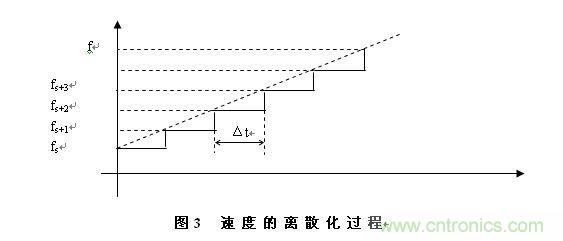
單片機(jī)在控制電機(jī)加減速的過程中,一般用離散方法逼近理想的升降速曲線。加減速的斜率在直線加速過程中,速度不是連續(xù)變化,而是按分檔階段變化,為與要求的升速斜率相逼近,必須確定每個(gè)臺(tái)階上的運(yùn)行時(shí)間,見圖3。時(shí)間Δt越小,升速越快,反之越慢。Δt的大小可由理論或?qū)嶒?yàn)確定,以升速最快而又不失步為原則。每個(gè)臺(tái)階的運(yùn)行步數(shù)為為Ns=fsΔt=sΔN,反映了每個(gè)速度臺(tái)階運(yùn)行步數(shù)與當(dāng)前速度s之間的關(guān)系,程序執(zhí)行過程中,每次速度升一檔,都要計(jì)算這個(gè)臺(tái)階應(yīng)走的步數(shù),然后以遞減方式檢查,當(dāng)減至零時(shí),該檔速度運(yùn)行完畢,升入又一檔速度。
電機(jī)在升速過程中,對升速總步數(shù)進(jìn)行遞減操作,當(dāng)減至零時(shí)升速過程結(jié)束,轉(zhuǎn)入勻速運(yùn)轉(zhuǎn)過程。減速過程的規(guī)律與升速過程相同,只是按相反的順序進(jìn)行。在步進(jìn)電機(jī)的啟停過程中,根據(jù)控制系統(tǒng)的具體特點(diǎn),采用上述三種升降速控制方式之一,都可以避免電機(jī)失步或過沖,達(dá)到比較精確的控制。