
【導讀】無人機是一種電動型無人航空器(UAV),市面上的主流產品為超過4個以上的多螺旋槳型無人機,因此也被叫做多旋翼無人機。因其飛行穩(wěn)定性和懸停性能卓越,促進鳥瞰攝影和視頻的發(fā)展,成為全球熱門商品。
無人機市場前景
無人機可分為個人興趣用和競技用的小型輕量普通民用無人機,以及可用于專業(yè)的空中拍攝、測量、監(jiān)控、檢查、農業(yè)、物流等領域的工業(yè)用無人機。自被稱為無人機元年的2015年以來,普通民用無人機一直占據著主要市場,近年來隨著工業(yè)用無人機銷售數增長率大幅提升,預測在2023年以后工業(yè)用無人機出貨數量將超過普通民用無人機(圖1)。
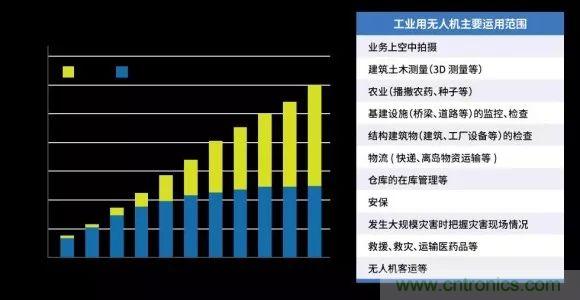
圖1:截至2025年全球無人機出貨數量預測表
無人機與遙控型旋翼機等的不同之處是:無人機是搭載有各種傳感器和被稱為飛行操縱器軟件的自主飛行型無人航空器;使用GPS等導航功能,持續(xù)獲取自身的位置信息,邊回避可視范圍內外的障礙物邊飛行,并自動返航;更可通過連接網絡,在網絡云盤上共享多臺無人機的數據,通過AI解析進行有效的信息運用。
目前,無人機的市場規(guī)模和范圍持續(xù)蓬勃發(fā)展,隨著新應用的不斷涌現,無人機的應用也越來越普遍,無論是運送郵件還是包裹、為兒童和老年人提供娛樂、安全監(jiān)控、農業(yè)或工業(yè)管理,或開辟航空攝影的新視野。這種普遍應用背后的關鍵因素之一便是使用了高性能微機電系統(MEMS)傳感器。
MEMS傳感器對無人機飛行性能的影響
得益于采用慣性MEMS傳感器,無人機可確保其方向穩(wěn)定,并可由用戶精確控制,甚至可自主飛行。然而,依然存在一些挑戰(zhàn)讓無人機系統設計變得十分復雜,例如電機未經過完美的校準,有效載荷不同會影響系統的動態(tài)性能,外在飛行條件可能會發(fā)生急劇的改變,或者傳感器本身也可能引入誤差。這些挑戰(zhàn)會造成定位處理偏差,并最終導致導航期間的位置偏差,甚至造成無人機失靈。
要使無人機超越玩具的范疇,高品質MEMS傳感器和先進軟件至關重要。無人機的慣性測量單元(IMU)、氣壓傳感器、地磁傳感器、應用特定型傳感器節(jié)點(ASSN)和傳感器數據融合的精度對其飛行性能有著直接和實質性的影響。
尺寸限制以及苛刻的環(huán)境和操作條件(如溫度變化和振動)都對傳感器提出了更高的要求。MEMS傳感器必須盡可能避免這些影響,并提供精確、可靠的測量。有多種方法可以實現出色的飛行性能:軟件算法,如傳感器校準和數據融合;機械系統設計,例如減少振動,以及根據無人機制造商自己的要求和需求選擇MEMS傳感器。下面就讓我們通過一些示例來仔細研究一下MEMS傳感器。
多種MEMS傳感器技術在無人機中的具體應用
無人機的核心是姿態(tài)航向參照系統(AHRS),其中包括慣性傳感器、磁力計和處理單元。AHRS估算設備定位,例如滾動、俯仰和偏航角。傳感器誤差(如偏移、靈敏度誤差或熱漂移)會導致定位錯誤。下圖顯示了加速度計偏移函數形式的定位誤差(滾動、俯仰角),這通常是造成傳感器連續(xù)誤差的核心根源(圖2)。例如,僅20mg的加速度計偏移便會導致設備方向出現1度誤差。
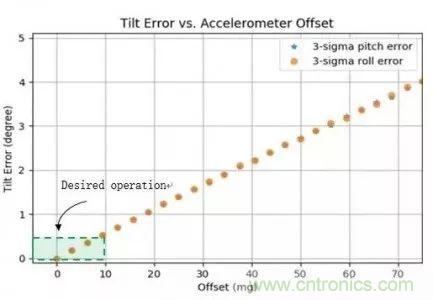
圖2:加速度計偏移引起的傾斜誤差
慣性測量單元(IMU)包括加速度傳感器和陀螺儀,以及相應的嵌入式處理能力,這使其能夠在線性移動和旋轉方面識別運動。磁力計如同一部指南針,可以根據地球的磁場建議無人機的航向。
無人機內置的高性能氣壓傳感器可精確測量高度,可以與IMU的測量結果結合使用,一起進行高度控制。氣壓傳感器必須盡可能避免外部影響和不準確性。對無人機中壓力傳感器的要求通常非??量?。由于受到不理想天氣和溫度條件的影響,必須將傳感器的精度保持在嚴格的公差范圍內,而且傳感器必須具有低延遲性,以及在長時間下的極低漂移。
應用特定型傳感器節(jié)點(ASSN)提供高度集成的智能傳感器集線器,將多個傳感器組合在一個封裝中,并配有可編程微控制器。它為運動傳感應用提供靈活的低功耗解決方案。
除了單獨傳感器之外,我們還可以在系統層面對無人機的整體信號處理結構進行查看,并確定集成傳感器讀數和控制所需的軟件。通過使用這些集成傳感器,以及對各種傳感器數據進行融合,可以直接在芯片上執(zhí)行某些軟件功能(比如定向處理)。除了MEMS傳感器,Bosch Sensortec還提供用于定位處理的傳感器數據融合軟件,其中包括傳感器校準、傳感器數據預處理和定位處理等功能。對于無人機制造商而言,這可以顯著降低工程和軟件的復雜性、避免不必要的風險并縮短產品上市時間。
推薦閱讀:



