
【導讀】加速度計能夠測量加速度、傾斜、振動或沖擊,因此適用于從可穿戴健身裝置到工業(yè)平臺穩(wěn)定系統(tǒng)的廣泛應用。市場上有成百上千的加速度計器件可供選擇,其成本和性能各不相同。本文討論加速度計的關鍵參數(shù)和特性,以及它們與傾斜和穩(wěn)定應用的關系,從而幫助你選擇最合適的加速度計。
最新MEMS電容式加速度計應用于傳統(tǒng)上由壓電加速度計和其他傳感器主導的應用領域。新一代MEMS加速度計可為CBM、結構健康監(jiān)控(SHM)、資產健康監(jiān)控(AHM)、生命體征監(jiān)測(VSM)和物聯(lián)網(wǎng)無線傳感器網(wǎng)絡等應用提供解決方案。然而,在有如此多加速度計和如此多應用的情況下,選擇合適的加速度計并非易事。
尚無行業(yè)標準界定加速度計屬于何種類別。加速度計的一般分類及相應的應用如表1所示。所示的帶寬和g值范圍是加速度計用在所列終端應用中的典型值。

表1. 加速度計等級和典型應用領域
圖1顯示了各種MEMS加速度計的快照,并依據(jù)特定應用的主要性能指標和智能/集成水平將各傳感器歸類。本文的一個重要關注對象是基于增強型MEMS結構和信號處理的新一代加速度計以及世界一流的封裝技術,其穩(wěn)定性和噪聲性能可與更昂貴的專門器件相媲美,而功耗更低。這些特性及加速度計的其他關鍵規(guī)格將在下文依據(jù)應用相關性加以詳細討論。
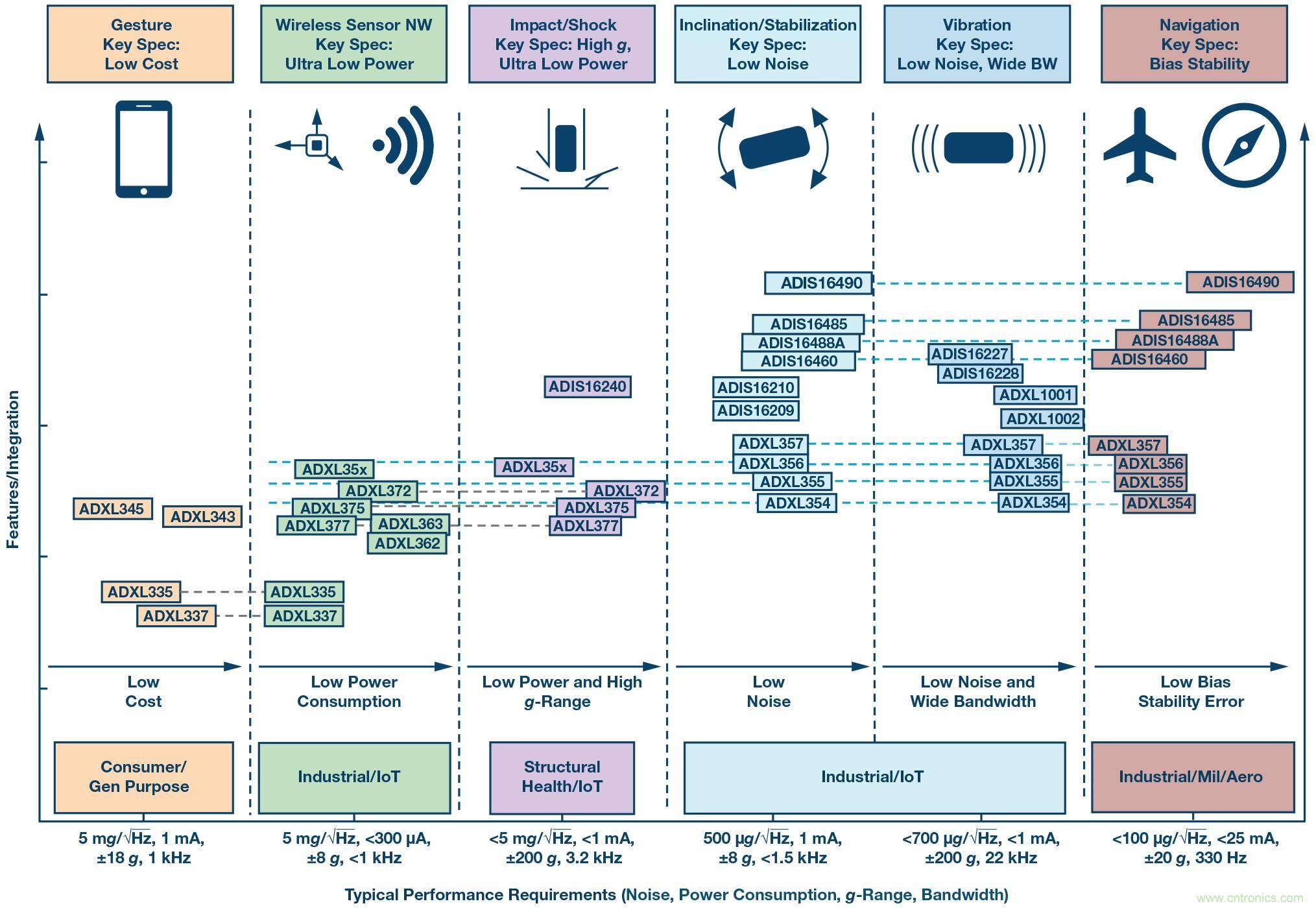
圖1. ADI公司精選MEMS加速度計的應用版圖
傾斜檢測
主要標準:偏置穩(wěn)定度、失調溫漂、低噪聲、可重復性、振動校 正、跨軸靈敏度。
對MEMS電容式加速度計而言,精確的傾斜檢測是一種要求頗高的應用,尤其是在有振動的情況下。在動態(tài)環(huán)境中利用MEMS電容式加速度計實現(xiàn)0.1°的傾斜精度非常困難——<1°很困難,>1°較易實現(xiàn)。為使加速度計有效測量傾斜度,必須對傳感器性能和終端應用環(huán)境有很好的了解。相比于動態(tài)環(huán)境,靜態(tài)環(huán)境對傾斜測量更加有利,因為振動或沖擊可能會破壞傾斜數(shù)據(jù),引起嚴重測量誤差。傾斜測量的最重要特性有溫度系數(shù)失調、遲滯、低噪聲、短期/長期穩(wěn)定性、可重復性和良好的振動校正。
0 g偏置精度、焊接引起的0 g偏置漂移、PCB外殼對準引起的0 g偏置漂移、0 g偏置溫度系數(shù)、靈敏準確度和溫度系數(shù)、非線性度以及跨軸靈敏度等誤差,是可以觀測到的,并且可以通過裝配后校準流程加以降低。遲滯、使用壽命期間的0 g偏置漂移、使用壽命期間的靈敏度漂移、潮濕引起的0 g漂移,以及溫度隨時間變化引起的PCB彎曲和扭轉等等,這些誤差項無法通過校準或其他方法解決,需要通過一定程度的原位維修才能減少。
ADI公司的加速度計可分為MEMS (ADXLxxx)和iSensor? (ADIS16xxx)特殊用途器件兩類。iSensor或智能傳感器是高集成度(4到10個自由度)且可編程器件,適用于動態(tài)環(huán)境下的復雜應用。這些高集成度即插即用解決方案包括全面的工廠校準、嵌入式補償和信號處理,解決了上述需要原位維修的很多誤差,大大降低了設計和驗證負擔。這種全面的工廠校準為整個傳感器信號鏈提供額定溫度范圍(通常是?40°C至+85°C)內的靈敏度和偏置特性。因此,每個iSensor器件都有其獨特的補償公式,安裝后可產生精確的測量結果。對于一些系統(tǒng),工廠校準可免除系統(tǒng)級校準,大大簡化操作。
iSensor器件專門針對某些應用而開發(fā)。例如,圖2所示的 ADIS16210 專門針對傾斜應用而設計并定制,因此,它能提供<1°的相對精 度且開箱即用。這主要歸功于集成信號處理和特定器件校準,以 便實現(xiàn)最佳精度性能。iSensor器件將在穩(wěn)定性部分進一步討論。
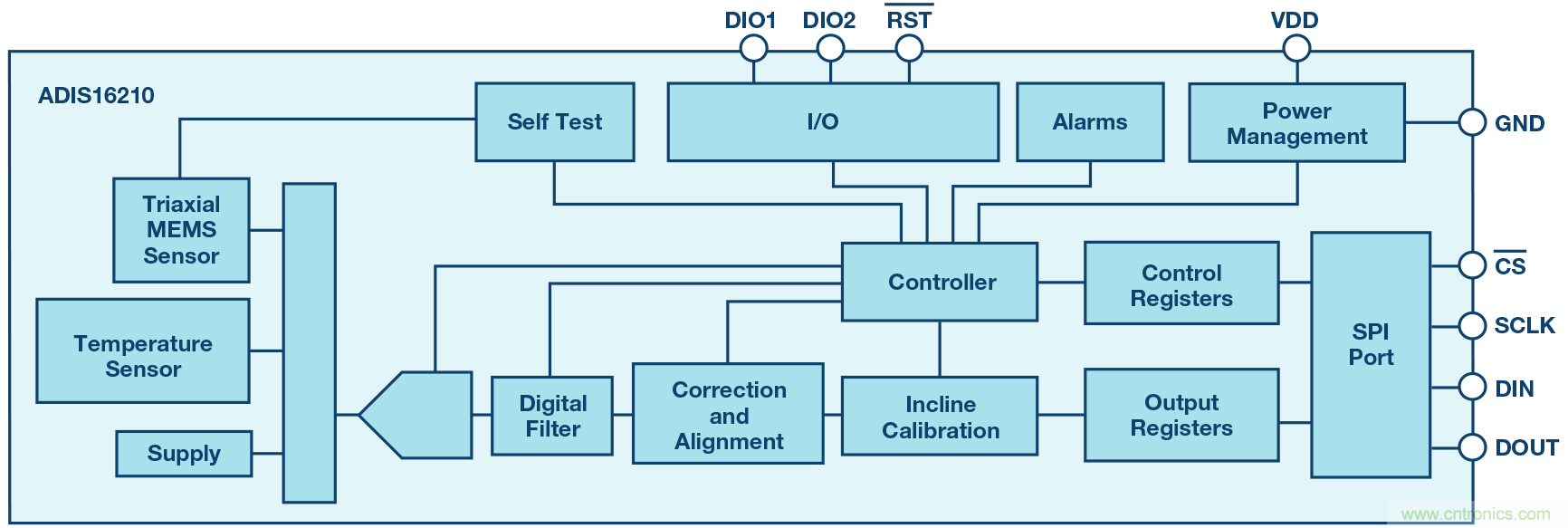
圖2. ADIS16210精密三軸傾斜
最新一代加速度計架構(例如 ADXL355)提供更多功能(傾斜、狀態(tài)監(jiān)控、結構健康、IMU/AHRS應用),包含的集成模塊更少針對特定應用,但功能豐富,如圖3所示。
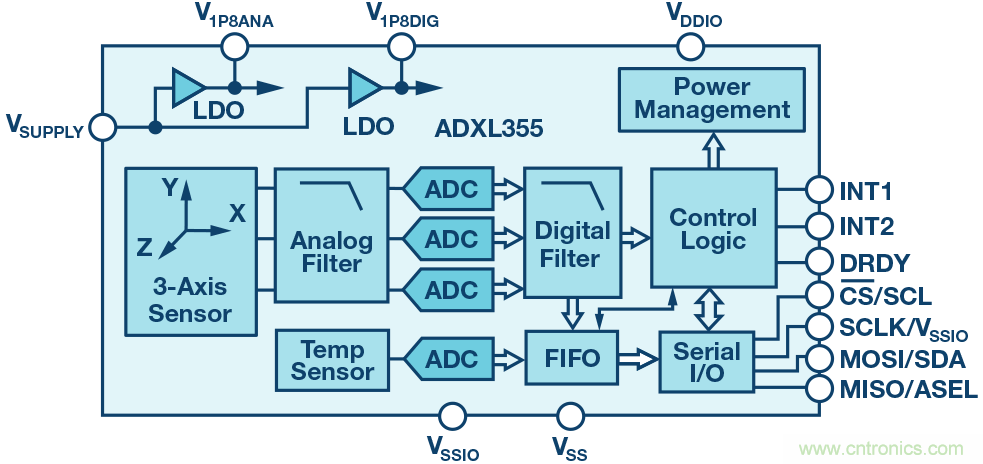
圖3. 低噪聲、低漂移、低功耗3軸MEMS加速度計ADXL355
下面比較通用加速度計ADXL345和新一代低噪聲、低漂移、低功耗加速度計ADXL355,后者是廣泛應用的理想之選,例如物聯(lián)網(wǎng)傳感器節(jié)點和傾角計。這一比較著眼于傾斜應用中的誤差源,以及可以補償或消除的誤差。
表2列出了消費級ADXL345加速度計理想性能規(guī)格及相應傾斜誤差的估算值。試圖達到最佳傾斜精度時,必須采用某種形式的溫度穩(wěn)定或補償。在下面的例子中,假設恒溫為25°C。無法完全補償?shù)淖钪饕`差促成因素是溫漂失調、偏置漂移和噪聲。可以降低帶寬來降低噪聲,因為傾斜應用通常需要低于1 kHz的帶寬。

表2. ADXL345誤差源估算值
表3列出了適用于ADXL355的相同標準。短期偏置值根據(jù)ADXL355數(shù)據(jù)手冊中的Allan方差圖估算。25°C時,通用ADXL345補償后的估計傾斜精度為0.1°。工業(yè)級ADXL355的估計傾斜精度為0.005°。

表3. ADXL355誤差源估算值
通過比較ADXL345和ADXL355可以看出,重大誤差貢獻因素引起的誤差已顯著降低,比如噪聲引起的誤差從0.05°降低到0.0045°,偏置漂移引起的誤差從0.057°降低到0.00057°。這表明MEMS電容式加速度計在噪聲和偏置漂移等性能方面取得了巨大飛躍,在動態(tài)條件下能夠提供更高水平的傾斜精度。
選擇更高等級的加速度計對于實現(xiàn)所需性能至關重要,特別是應用需要小于1°的傾斜精度時。應用精度取決于應用條件(溫度大幅波動,振動)和傳感器選擇(消費級與工業(yè)級或戰(zhàn)術級)。在這種情況下,ADXL345將需要大量的補償和校準工作才能實現(xiàn)小于1°的傾斜精度,增加整個系統(tǒng)的工作量和成本。根據(jù)最終環(huán)境和溫度范圍內的振動大小,甚至不可能實現(xiàn)上述精度。25°C至85°C范圍內的溫度系數(shù)失調漂移為1.375°,已經超過傾斜精度小于1°的要求。
25°C到85°C范圍內ADXL355的最大溫度系數(shù)失調漂移為0.5°。
ADXL354和ADXL355可重復性(X和Y軸為±3.5 mg/0.2°,Z軸為±9 mg/0.5°)為10年壽命預測值,包括高溫工作壽命測試(HTOL)(TA = 150°C、VSUPPLY = 3.6 V、1000小時)、溫度循環(huán)(?55°C至+125°C且循環(huán)1000次)、速度隨機游走、寬帶噪聲和溫度遲滯引起的偏移。這些新型加速度計可在所有條件下提供可重復的傾斜測量,在惡劣環(huán)境中無需進行大量校準即可實現(xiàn)最小傾斜誤差,而且能最大程度減少部署后的校準需要。ADXL354和ADXL355加速度計能以0.15 mg/°C(最大值)的零失調系數(shù)保證溫度穩(wěn)定性。這種穩(wěn)定性最大程度地減少了校準和測試相關的資源和成本開銷,幫助設備OEM制造商實現(xiàn)更高的吞吐速率。此外,產品采用密封封裝,可以確保最終產品出廠后重復性與穩(wěn)定性始終符合其規(guī)格參數(shù)。
通常,數(shù)據(jù)手冊上不會顯示可重復性和對振動校正誤差(VRE)的抑制能力,因為這些參數(shù)可能暴露產品性能較低。例如,ADXL345是一款針對消費類應用的通用加速度計,VRE不是設計人員的重要關注參數(shù)。然而,在慣性導航等高要求應用、傾斜應用或振動頻繁的特定環(huán)境中,對VRE的抑制能力可能是設計人員的重點關注對象,因此ADXL354/ADXL355和ADXL356/ADXL357 數(shù)據(jù)手冊會 給出此類參數(shù)。
如表4所示,VRE是加速度計暴露于寬帶振動時引入的失調誤差。當加速度計暴露于振動環(huán)境時,相比溫漂和噪聲導致的0 g失調,VRE在傾斜測量中會導致明顯誤差。這是不再使用數(shù)據(jù)手冊的主要原因之一,因為很容易掩蓋其他主要規(guī)格。

表4. 以傾斜度表示的誤差
(12.5g rms振動引起的1g方位失調的范圍為±2g。)
VRE是加速度計對交流振動(被整流為直流)的響應。這些直流整流的振動可能會使加速度計失調發(fā)生偏移,引起嚴重誤差,尤其是在目標信號為直流輸出的傾斜應用中。直流失調的任何小變化都可能被解釋為傾角變化,導致系統(tǒng)級誤差。
各種諧振和加速度計(本例為ADXL355)中的濾波器均可能引起VRE,因為VRE對頻率有很強的依賴性。這些諧振會放大振動,放大倍數(shù)等于諧振的Q因數(shù),而在較高頻率時會抑制振動,原因是諧振器存在二階偶極子響應。傳感器的諧振品質因數(shù)越高,振動幅度越大,其VRE也就越大。較大測量帶寬會將高頻帶內振動包含在內,引起較高的VRE,如圖4所示。為加速度計選擇合適的帶寬以抑制高頻振動,可以避免很多振動相關問題。
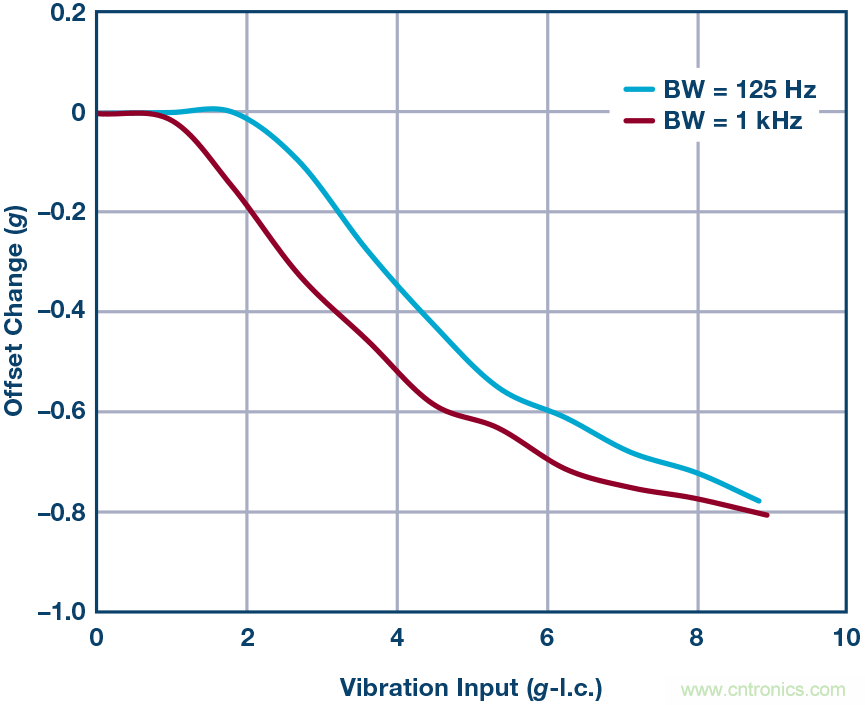
圖4. 在不同帶寬進行的ADXL355 VRE測試
靜態(tài)傾斜測量通常需要±1g到±2g的低g加速度計,帶寬小于1.5 kHz。模擬輸出ADXL354和數(shù)字輸出ADXL355均為低噪聲密度(分別為20 μg√Hz和25 μg√Hz)、低0g失調漂移、低功耗三軸加速度計,集成溫度傳感器,測量范圍可選,如表5所示。
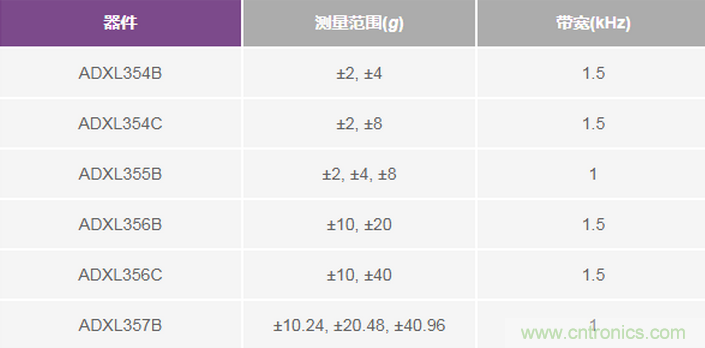
表5. ADXL354/ADXL355/ADXL356/ADXL357測量范圍
ADXL354/ADXL355和ADXL356/ADXL357采用密封封裝,有助于實現(xiàn)出色的長期穩(wěn)定性。性能提升與封裝通常是正相關,如圖5所示。封裝常常被忽視,其實制造商可以利用封裝來實現(xiàn)更好的穩(wěn)定和漂移性能。這是ADI公司的一個重點關注方面,我們提供類型廣泛的傳感器封裝以適應不同的應用領域。
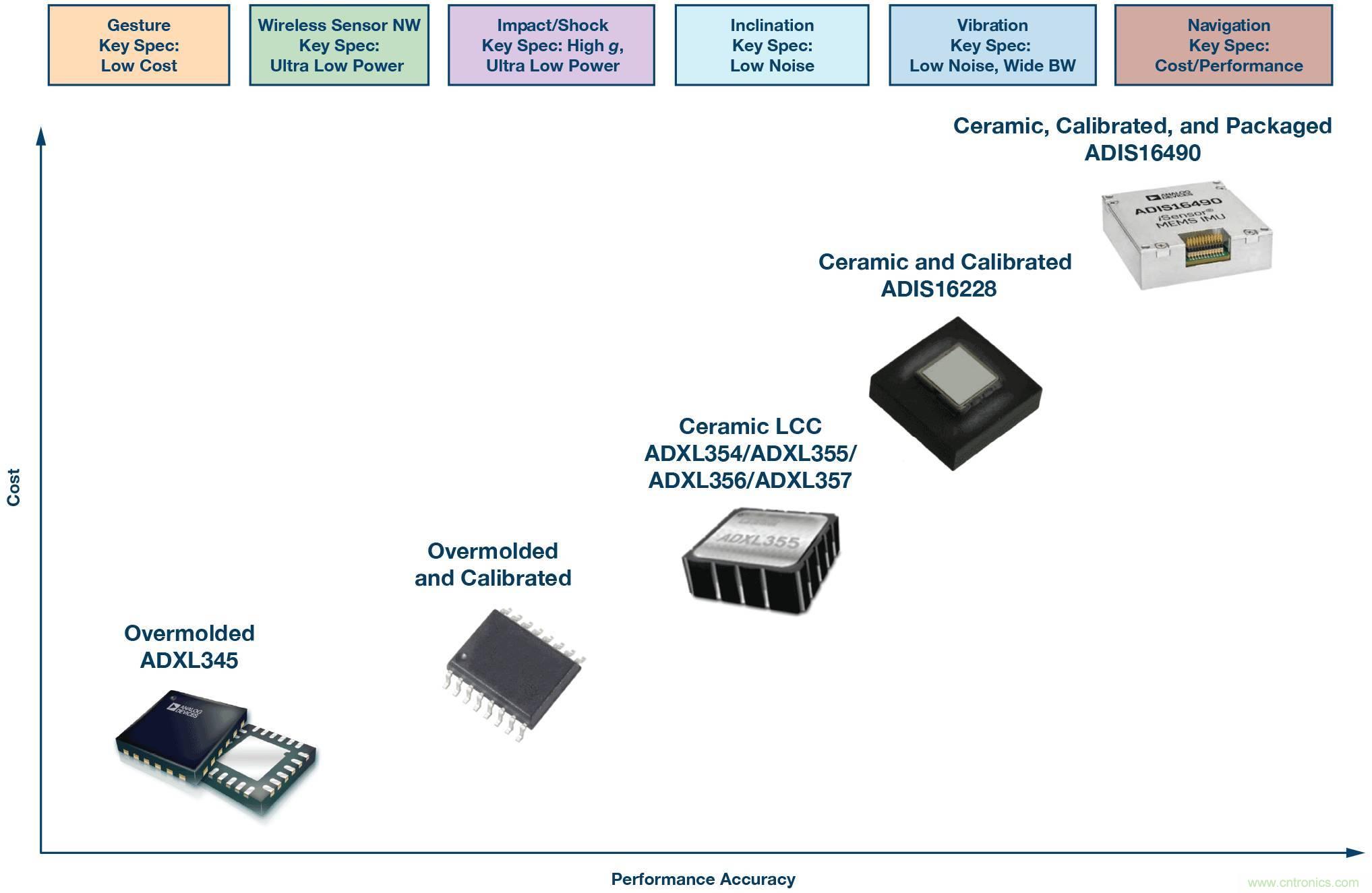
圖5. 高級封裝技術和校準帶來性能提升的示例
高溫和動態(tài)環(huán)境
在適合高溫或惡劣環(huán)境的加速度計可用之前,一些設計人員曾不得不將標準溫度IC用在遠超出數(shù)據(jù)手冊限值的情形中。這意味著最終用戶須承擔在高溫下檢驗器件質量的責任和風險,成本高昂且頗費時間。密封封裝能夠耐受高溫已是廣為人知的事實,它通過一道能抵御濕氣和污染的屏障來防止腐蝕。ADI公司提供各類密封器件,這些器件具有增強的溫度穩(wěn)定性和性能。ADI公司還大力研究了塑料封裝在高溫下的性能,尤其是引線框架和引腳適應高溫焊接工藝的能力,使其在高沖擊和振動環(huán)境中牢固可靠。因此,ADI公司提供18款額定溫度范圍為?40°C至+125°C的加速度計,包括 ADXL206,ADXL354/ADXL355/ADXL356/ADXL357,ADXL1001/ADXL1002, ADIS16227/ADIS16228和ADIS16209。大部分競爭對手未提 供能在?40°C至+125°C溫度范圍內或惡劣環(huán)境條件下(例如重工業(yè)機械和井下鉆探)工作的MEMS電容式加速度計。
在溫度超過125°C的惡劣環(huán)境中進行傾斜測量是極具挑戰(zhàn)性的工作。ADXL206是一款高精度(傾斜精度<0.06°)、低功耗、完整的雙軸MEMS加速度計,適用于高溫和惡劣環(huán)境,例如井下鉆探。該器件采用13 mm × 8 mm × 2 mm側面釬焊、陶瓷、雙列直插式封裝,支持?40°C至+175°C的環(huán)境溫度范圍,超過175°C時性能會下降,但100%可恢復。
在有振動的動態(tài)環(huán)境中(例如農用設備或無人機)進行傾斜測量,需要g值范圍較高的加速度計,比如ADXL356/ADXL357。有限g值范圍的加速度計測量可能會削波,導致輸出失調增加。引起削波的原因可能是靈敏軸在1 g重力場中,或者是發(fā)生上升時間快但衰減慢的沖擊。較高的g值范圍可減少加速度計削波,從而降低失調,在動態(tài)應用中提供更好的傾斜精度。
圖6所示為ADXL356 Z軸的g值范圍有限的測量,此測量范圍中已經存在1g。
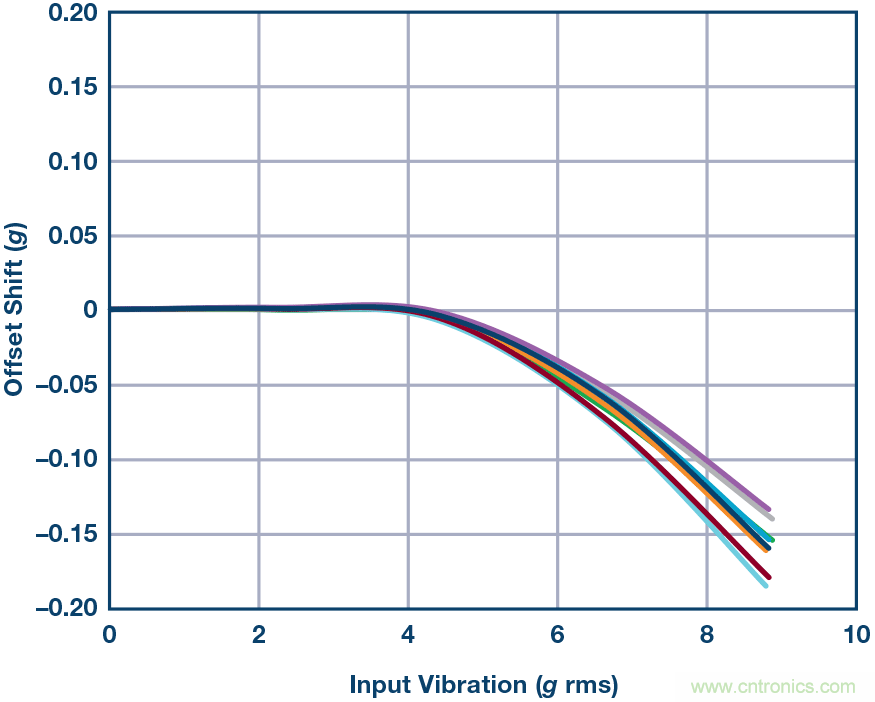
圖6. ADXL356 VRE,Z軸相對于1 g的失調,±10 g范圍,Z軸方向 = 1 g
圖7所示為同一測量,但g值范圍從±10 g擴展到±40g??梢郧宄吹剑铀俣扔嫷膅值范圍擴展顯著降低了削波引起的失調。
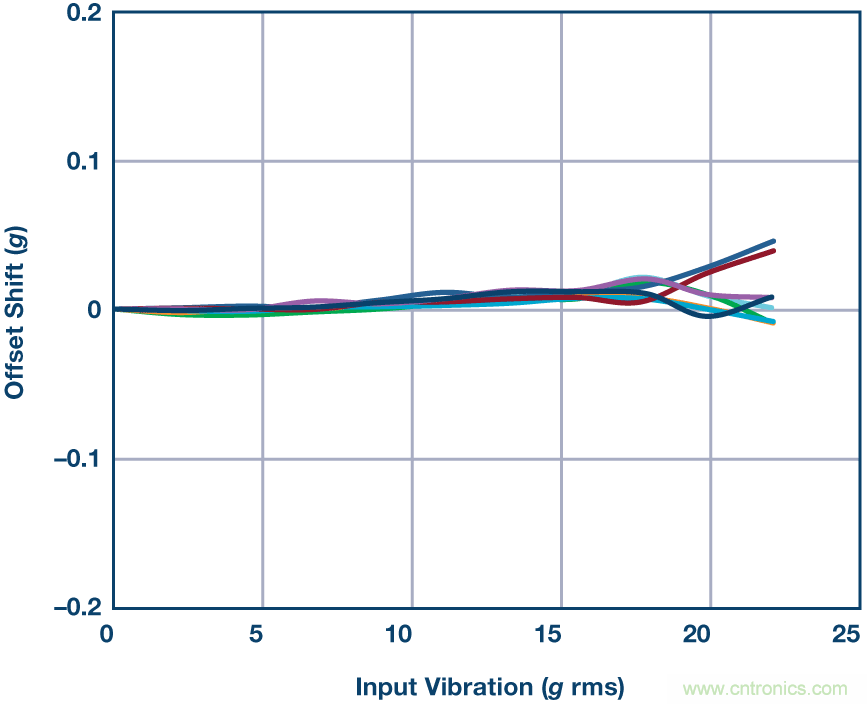
圖7. ADXL356 VRE,Z軸相對于1 g的失調,±40 g范圍,Z軸方向 = 1 g
ADXL354/ADXL355和ADXL356/ADXL357提供出色的振動校正、長期重復性和低噪聲性能,而且尺寸很小,非常適合靜態(tài)和動態(tài)環(huán)境中的傾斜檢測應用。
穩(wěn)定
主要標準:噪聲密度、速度隨機游走、運動中偏置穩(wěn)定度、偏置重復性和帶寬。
檢測并了解運動可以給許多應用帶來好處。掌控一個系統(tǒng)發(fā)生的運動,然后利用該信息提高性能(縮短響應時間、提高精度、加快運行速度),增強安全性或可靠性(系統(tǒng)在危險情況下關機),或者獲得其他增值特性,是很有益的。由于運動的復雜性,有大量穩(wěn)定性應用需要綜合運用陀螺儀和加速度計(傳感器融合,如圖8所示),例如UAV監(jiān)控設備和船上天線指向系統(tǒng)等。
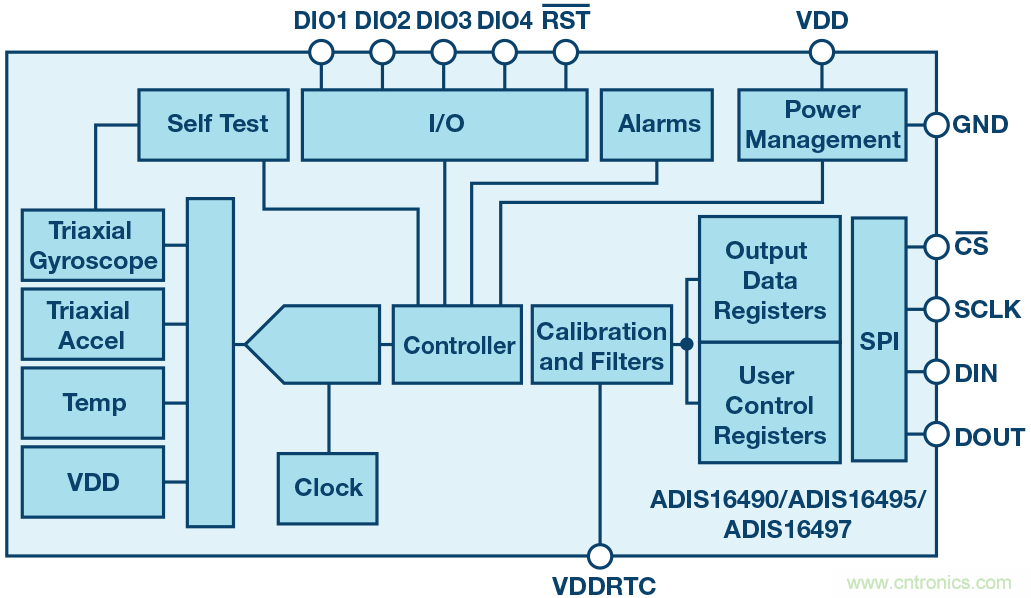
圖8. 6自由度IMU
6自由度IMU使用多個傳感器,以便彌補彼此的弱點??雌饋硐袷且粋€或兩個軸上的簡單慣性運動,實際可能需要加速度計和陀螺儀傳感器融合,目的是消除振動、重力和其他單憑加速度計或陀螺儀無法準確測量的影響因素。加速度計數(shù)據(jù)包括重力分量和運動加速度。二者無法區(qū)分,但可利用陀螺儀將重力分量從加速度計輸出中去除。為了根據(jù)加速度確定位置,需要進行積分,在此過程之后,加速度計數(shù)據(jù)的重力分量引起的誤差可能會快速變大。由于累積誤差,僅憑陀螺儀不足以確定位置。陀螺儀不檢測重力,因此可用作加速度計的輔助傳感器。
在穩(wěn)定性應用中,MEMS傳感器必須精確測量平臺方位,特別是在運動時。圖9是一個采用伺服電機校正角向運動的典型平臺穩(wěn)定系統(tǒng)的框圖。反饋/伺服電機控制器將方向傳感器數(shù)據(jù)轉換為伺服電機的校正控制信號。
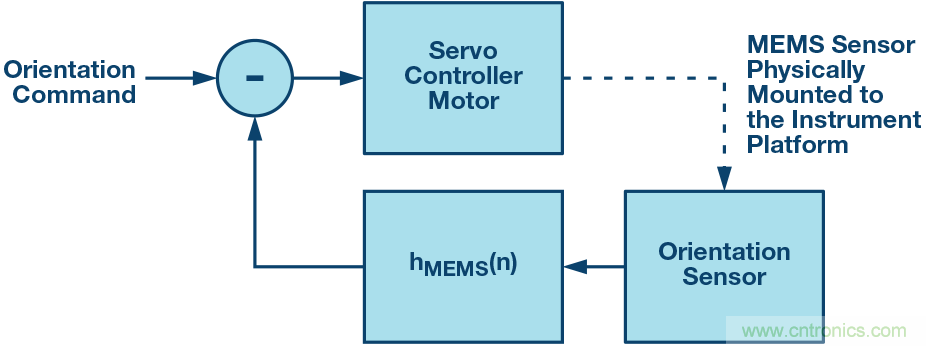
圖9. 基本平臺穩(wěn)定系統(tǒng)
最終應用將決定所需的精度水平,而所選的傳感器質量(消費級還是工業(yè)級)將決定其能否實現(xiàn)。區(qū)分消費級器件和工業(yè)級器件很重要,有時候二者的區(qū)別很微妙,可能需要仔細考慮。表6顯示了消費級加速度計和IMU中集成的中檔工業(yè)級加速度計的主要區(qū)別。

表6. 工業(yè)MEMS器件對所有已知潛在誤差源進行全面測定,精度水平比消費級器件高出一個數(shù)量級以上
在某些條件有利且可接受較低精度數(shù)據(jù)的情況下,使用低精度器件便可滿足性能需要。然而,對能在動態(tài)環(huán)境中工作的傳感器需求迅速增長,較低精度器件由于不能降低實際測量中的振動效應或溫度效應而大受影響,很難達到小于3°至5°的指向精度。多數(shù)低端消費級器件未提供諸如振動校正、角度隨機游走之類的參數(shù)規(guī)格,而這些規(guī)格在工業(yè)應用中恰恰可能是最大的誤差源。
為了在動態(tài)環(huán)境中達到1°甚至0.1°的指向精度,設計人員的器件選擇必須聚焦于傳感器抑制溫漂誤差和振動影響的能力。傳感器濾波和算法(傳感器融合)雖然是提升性能的關鍵要素,但無法消除消費級與工業(yè)級傳感器的差距。ADI公司新型工業(yè)IMU的性能接近于上一代導彈制導系統(tǒng)所用的產品。諸如ADIS1646x和已宣布的ADIS1647x等器件以標準和迷你IMU外形尺寸提供精密運動檢測,打進過去的特殊應用領域。
本文第二部分將繼續(xù)探討MEMS加速度計的重要工作特性,以及它們與可穿戴設備、狀態(tài)監(jiān)控、物聯(lián)網(wǎng)、結構健康監(jiān)控和資產健康監(jiān)控等應用領域的關系。敬請期待哦~
