
【導(dǎo)讀】LiDAR系統(tǒng)使用脈沖激光照射目標(biāo)區(qū)域,并測量反射信號(hào)返回接收器所需的時(shí)間。LiDAR系統(tǒng)一般包括:激光源或其它發(fā)射器、靈敏的光電探測器或其它接收器、同步和數(shù)據(jù)處理電子系統(tǒng)、運(yùn)動(dòng)控制設(shè)備或微機(jī)電系統(tǒng)(MEMS)掃描鏡(二選一),均是基于精確的激光掃描組件并可用于創(chuàng)建3D地圖或收集近距離數(shù)據(jù)。
對(duì)于LiDAR(激光雷達(dá))來說,一種類型的激光并不能適用于所有情況:系統(tǒng)設(shè)計(jì)者需了解實(shí)際應(yīng)用環(huán)境及性能需求后,才能對(duì)光源進(jìn)行選擇。
據(jù)報(bào)道,對(duì)激光探測和測距(LiDAR)系統(tǒng)、服務(wù)于自動(dòng)駕駛汽車產(chǎn)業(yè)的零部件制造商來說,合并及收購活動(dòng)極其瘋狂,同時(shí)其他行業(yè)也加入LiDAR狂熱大軍。

豐田最新自動(dòng)駕駛平臺(tái)增加LiDAR
LiDAR系統(tǒng)使用脈沖激光照射目標(biāo)區(qū)域,并測量反射信號(hào)返回接收器所需的時(shí)間。LiDAR系統(tǒng)一般包括:激光源或其它發(fā)射器、靈敏的光電探測器或其它接收器、同步和數(shù)據(jù)處理電子系統(tǒng)、運(yùn)動(dòng)控制設(shè)備或微機(jī)電系統(tǒng)(MEMS)掃描鏡(二選一),均是基于精確的激光掃描組件并可用于創(chuàng)建3D地圖或收集近距離數(shù)據(jù)。
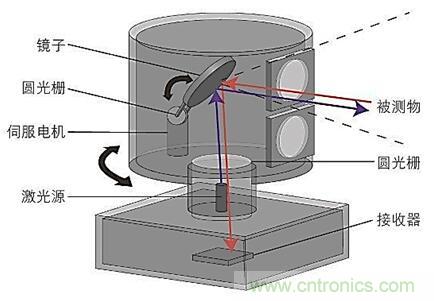
LiDAR系統(tǒng)簡示圖
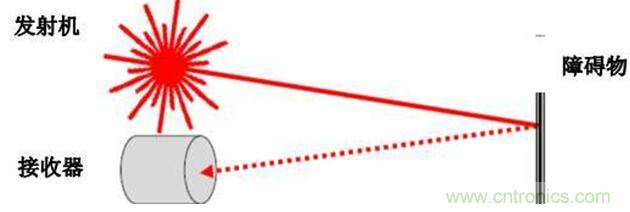
LiDAR工作原理圖
據(jù)了解,在這些所需的組件中,激光本身就有助于提升整個(gè)系統(tǒng)的性能。比如,激光光束質(zhì)量和發(fā)散角是負(fù)責(zé)LiDAR制圖的橫向(x軸和y軸)分辨率,而短脈沖持續(xù)時(shí)間和時(shí)間抖動(dòng)則是負(fù)責(zé)縱向(z軸)的精度。再比如,脈沖能量是實(shí)現(xiàn)長程的關(guān)鍵參數(shù),而高脈沖重復(fù)率則可提升掃描速度并提高數(shù)據(jù)吞吐量。
激光性能考量因素
高峰值功率(幾十千瓦至幾十兆瓦)脈沖(納秒范圍)的固態(tài)激光器已用于LiDAR數(shù)十年,尺寸、重量、成本、功耗、液體冷卻、沖擊與振動(dòng)靈敏度,以及極端環(huán)境限制了LiDAR儀器在移動(dòng)設(shè)備、空中和空間應(yīng)用中的發(fā)展。但像意大利Bright Solutions這樣的公司,近日開發(fā)出新一代高功率、亞納秒、通過空氣或熱傳導(dǎo)冷卻的Q開關(guān)固態(tài)激光器。此類激光器可打破以往的限制,并提供從紫外線到近紅外的多種激光波長。

Bright Solutions公司的固態(tài)激光器
對(duì)于機(jī)載地形測繪,通常使用波長約為1µm的激光光源,這種波長可使光波在保證用眼安全的前提下將投射范圍擴(kuò)展到足夠大。而對(duì)于海洋測繪(即海底和沿海地區(qū)的高分辨率測繪),常使用一種高能量的、頻率倍增的532 nm的激光光源,這是由于綠色光的波長是純水的高透波率與潛艇微粒的有限反向散射之間最合適的折中。
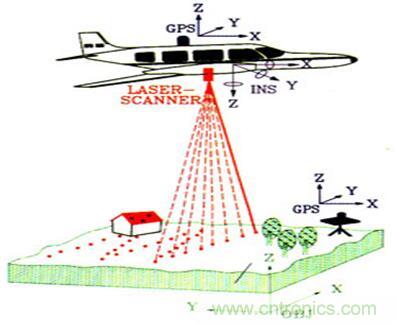
機(jī)載地形測繪示意圖
如果單考慮成本和能耗,532 nm至1 µm的波長通常是有益的,但若要達(dá)到相對(duì)較遠(yuǎn)的距離,激光的強(qiáng)度就很容易超過1類激光安全極限。這種情況下,如果光波沒有達(dá)到符合用眼安全的直徑(從而增加系統(tǒng)尺寸),激光發(fā)射就會(huì)對(duì)人眼造成傷害。
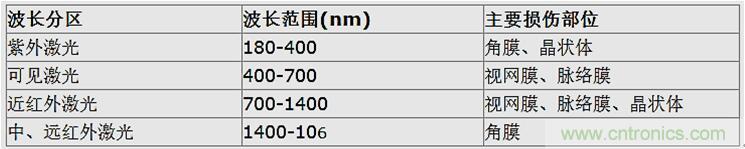
不同波長激光眼損傷部位
民用和商業(yè)應(yīng)用中,保證用眼安全的激光器在高性能緊湊型LiDAR中越來越受歡迎。在用眼安全的波長范圍內(nèi),當(dāng)在地形測繪和避障中探測固體時(shí),通常需要約紅外激光器發(fā)射1.5 µm的波長。事實(shí)上,大氣情況良好時(shí),探測器在1.5 µm范圍內(nèi)是非常高效的?;蛘撸s355 nm或更短的紫外線波長是保證用眼安全的大氣LiDAR系統(tǒng)的最佳選擇,因?yàn)榇髿馕⒘S邢鄬?duì)較高的反向散射系數(shù)。
除了考慮波長,脈沖持續(xù)時(shí)間是否也很重要?理想情況下,LiDAR的設(shè)計(jì)者們希望達(dá)到毫米到厘米級(jí)的縱向測量分辨率,因此應(yīng)該考慮短脈沖持續(xù)時(shí)間。即便如此,非常短的脈沖(約幾皮秒)也會(huì)導(dǎo)致激光光譜和接收機(jī)帶寬的擴(kuò)大,從而使信噪比變差。另一方面,脈沖超過1納秒,噪聲減少,但分辨率也會(huì)降低。使脈沖持續(xù)時(shí)間達(dá)到約幾百皮秒(或亞納秒),這是高縱向精度和信噪比的最佳權(quán)衡方案。
這里我們?cè)敿?xì)介紹自動(dòng)駕駛車輛LiDAR的激光選擇。
自動(dòng)駕駛車輛LiDAR
據(jù)ABI Research最近的一項(xiàng)調(diào)查顯示,到2026年1月,汽車上的LiDAR設(shè)備數(shù)量將達(dá)到6900萬部。正如Keopsys集團(tuán)(拉尼翁,法國)的Frederic Chiquet、研發(fā)經(jīng)理Guillaume Canat和首席執(zhí)行官M(fèi)arc le Flohic所解釋的那樣,現(xiàn)存兩類主要的自動(dòng)駕駛汽車LiDAR系統(tǒng):3D Flash LiDAR和掃描式LiDAR。
Flash LiDAR使用的是廣角發(fā)射源和廣角光學(xué)系統(tǒng)(例如魚眼鏡頭),將在單個(gè)發(fā)射過程中獲得的反散射光集中于矩陣探測器上,以獲得用于模擬車輛周圍區(qū)域的所有飛行時(shí)間(ToF)數(shù)據(jù)。相反地,掃描式LiDAR可以逐行地處理3D環(huán)境;光在每個(gè)方向上依次發(fā)射,對(duì)應(yīng)的回聲由探測器逐個(gè)檢測。符合用眼安全的激光源必須以脈沖模式工作,光束需強(qiáng)大到能夠探測到100米外穿深色衣服的行人,工作溫度為-40到85°C,并且可發(fā)射出測距精度達(dá)10厘米的脈沖。
許多LiDAR光源是基于激光二極管,也有非制冷光纖激光器,較激光二極管有諸多的優(yōu)勢,如擁有高功率光束分裂和使用光纖路由到多個(gè)傳感器位置的能力。使用主振蕩器功率放大器(MOPA)結(jié)構(gòu)中,一種典型的1550 nm LiDAR的光纖激光器的脈沖重復(fù)率達(dá)到5~250 kHz,功率水平分別為10~15 kW和200~300 W。
脈沖激光二極管和光纖激光源用于自動(dòng)駕駛汽車LiDAR的應(yīng)用對(duì)比研究如下。
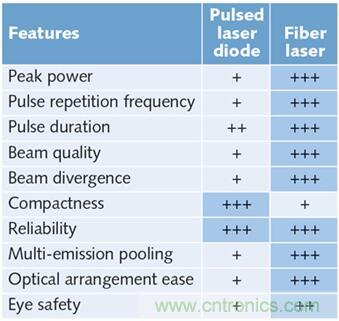
自動(dòng)駕駛車輛LiDAR應(yīng)用中脈沖激光二極管和光纖激光器來源的比較(來源:Keopsys集團(tuán))
專用于自動(dòng)駕駛汽車的脈沖激光二極管是混合器件。激光芯片安裝在由MOSFET晶體管觸發(fā)的電容器中。每當(dāng)晶體管的柵極開啟時(shí),電容器內(nèi)積累的電荷就會(huì)被釋放到芯片中,從而釋放出光脈沖。盡管此類型光源的性價(jià)比不錯(cuò),相比昂貴的1550nm InGaAs光電二極管,其905 nm的輸出很容易被硅探測器檢測到,但激光二極管具有有限的脈沖重復(fù)率和較低的峰值功率,并且受到過熱效應(yīng)的限制。
3D Flash LiDAR的激光二極管光源是基于二極管堆疊技術(shù),用幾個(gè)邊緣發(fā)射器垂直封裝在一起,每層之間均由一層薄的散熱片隔開以防內(nèi)部過熱。不幸的是,非相干堆疊增加會(huì)導(dǎo)致輸出功率高,這樣通常不能滿足1類用眼安全的需求。盡管VCSEL是一種比疊加技術(shù)性價(jià)比更高的替代方案,但其較弱的輸出功率將其限制在短程ToF的應(yīng)用中。
(來源:麥姆斯咨詢)
推薦閱讀:
