
【導(dǎo)讀】本文從工程實(shí)踐角度,總結(jié)歷屆智能車大賽中無人駕駛技術(shù)進(jìn)展,從幾個(gè)潛在的突破點(diǎn)出發(fā)探討了自動(dòng)駕駛/無人駕駛技術(shù)的實(shí)用化內(nèi)容,聚焦環(huán)境感知技術(shù)及車載傳感器、車輛系統(tǒng)集成、V2X和車聯(lián)網(wǎng)、高精度定位和地圖技術(shù)、深度學(xué)習(xí)和計(jì)算平臺(tái)等方面,其內(nèi)容可供智能車輛研發(fā)者參考。
近來,采埃孚(ZF)收購激光雷達(dá)公司Ibeo的40%股權(quán),Velodyne旗下激光雷達(dá)公司Velodyne LiDAR獲福特汽車和百度聯(lián)合注資1.5億美元。Mobileye宣布終止與特斯拉的合作,不再為特斯拉Autopilot系統(tǒng)提供EyeQ系列芯片支持,轉(zhuǎn)而與英特爾、寶馬共同開發(fā)無人駕駛汽車技術(shù)和技術(shù)平臺(tái)。這些智能車圈的熱點(diǎn)事件背后,是自動(dòng)駕駛技術(shù)快速發(fā)展道路上的車載傳感器、核心部件、計(jì)算平臺(tái)等資源的整合,智能車輛研發(fā)進(jìn)入關(guān)鍵節(jié)點(diǎn)上、面向?qū)嵱没募夹g(shù)突破方面的考慮。
1、引言
1.1 從智能車挑戰(zhàn)賽看中國智能車發(fā)展情況
從2009開始,在國家自然科學(xué)基金委“視聽覺信息的認(rèn)知計(jì)算”重大研究計(jì)劃支持下,分別在西安、鄂爾多斯、赤峰、常熟等地舉辦了七屆“中國智能車未來挑戰(zhàn)賽”。智能車挑戰(zhàn)賽是現(xiàn)有的國內(nèi)外唯一專門面向無人駕駛的賽事,對(duì)中國無人駕駛車輛研究起到很大的推動(dòng)作用。

歷屆中國智能車未來挑戰(zhàn)賽
在前幾屆比賽中,參賽無人車輛行駛還比較慢,需要較多的人工干預(yù)。在2013年之后,國內(nèi)相關(guān)研究單位取得了較大進(jìn)步,參賽無人車輛已能在真實(shí)交通環(huán)境中進(jìn)行順暢地自主駕駛,與其他車輛進(jìn)行交互。在諸多研究單位中,涌現(xiàn)出了清華大學(xué)、國防科技大學(xué)、同濟(jì)大學(xué)、上海交大、軍事交通學(xué)院、西安交通大學(xué)、北京理工、北京聯(lián)合大學(xué)、南京理工大學(xué)、中科院合肥物資研究院、武漢大學(xué)、湖南大學(xué)等知名團(tuán)隊(duì)。這些團(tuán)隊(duì)已經(jīng)和一汽集團(tuán)、上汽集團(tuán)、廣汽集團(tuán)、比亞迪和長(zhǎng)城汽車等國內(nèi)眾多車企開展了許多深度合作。
不同年份中國無人駕駛車輛差異對(duì)比:

(a)2009年參賽無人車輛

(b)2015年參賽無人車輛
從上圖可以看出,2009年參賽無人車輛都是在現(xiàn)有商用車上經(jīng)過加裝外置傳感器和外置控制器等設(shè)備改裝而成。而在2015年參賽的部分無人車輛則體現(xiàn)了研究單位與車企深度合作的結(jié)果,已經(jīng)將大部分傳感器內(nèi)置并結(jié)合車載總線進(jìn)行了控制和深度改造。除此之外,國內(nèi)IT巨頭們也紛紛投入無人駕駛研究,例如樂視已在多處開展研發(fā),百度與寶馬合作的無人駕駛車輛已經(jīng)在北京的環(huán)路上進(jìn)行了測(cè)試,長(zhǎng)安汽車從重慶到北京進(jìn)行了長(zhǎng)途無人駕駛測(cè)試,這些車輛體現(xiàn)了不同等級(jí)智能化程度。在后續(xù)能夠集成人工智能研究最新成果,有望引領(lǐng)中國智能汽車發(fā)展。

IT企業(yè)和車企也投入智能車輛研發(fā)
1.2 無人駕駛面臨問題及潛在的突破點(diǎn)
雖然國內(nèi)外的智能車輛研究取得了極大的進(jìn)展,但是從近期的谷歌無人駕駛汽車和特斯拉自動(dòng)駕駛汽車的事故來看,相關(guān)技術(shù)實(shí)用化還面臨多重挑戰(zhàn)。其中,最為關(guān)鍵的是如何提高環(huán)境感知精確程度,在環(huán)境感知能力上突破。在此基礎(chǔ)上,特別是針對(duì)許多突發(fā)的交通場(chǎng)景,無人車輛需要進(jìn)行智能決策和處理。
無人駕駛車輛的環(huán)境感知
本文探討了無人駕駛技術(shù)幾個(gè)潛在突破點(diǎn):
首先,需要面向自動(dòng)駕駛功能進(jìn)行傳感感器選擇和優(yōu)化配置。由于交通環(huán)境的復(fù)雜性,需要高精度的傳感器進(jìn)行環(huán)境檢測(cè)?,F(xiàn)階段傳感器均受其工作范圍限制以及氣候環(huán)境因素和車輛運(yùn)動(dòng)的干擾,無法保證所有情況下的保證安全駕駛的行車要素的準(zhǔn)確檢出。以激光雷達(dá)為典型的外部傳感器價(jià)格昂貴,極大限制了實(shí)際大范圍應(yīng)用。所以,需要面向復(fù)雜環(huán)境感知需求,集成低價(jià)、性能優(yōu)秀的車內(nèi)和車外傳感器,發(fā)揮各傳感器的優(yōu)勢(shì),在合適的成本基礎(chǔ)上,按照不同等級(jí)的自動(dòng)駕駛功能需求進(jìn)行自身姿態(tài)和周邊駕駛環(huán)境感知的傳感器選擇和優(yōu)化配置。
其次,需要面向自動(dòng)駕駛重新設(shè)計(jì)的車載集成系統(tǒng)。結(jié)合全新自動(dòng)駕駛架構(gòu)設(shè)計(jì),結(jié)合集成化控制系統(tǒng)和新型總線分布,對(duì)自動(dòng)駕駛功能進(jìn)行擴(kuò)展和集成。通過集成更優(yōu)秀感知和決策算法的車載軟件,使得自動(dòng)駕駛系統(tǒng)具備更高安全性和魯棒性。
再次,需要V2X無線網(wǎng)絡(luò)支持。通過車聯(lián)網(wǎng)絡(luò)實(shí)現(xiàn)信息共享和傳感器視距和感知范圍擴(kuò)展。需要高精度GPS定位和高精度的3D地圖支持,降低對(duì)高精度環(huán)境感知的要求,降低實(shí)現(xiàn)高級(jí)自動(dòng)駕駛系統(tǒng)的難度。
此外,需要高性能計(jì)算平臺(tái)支持。通過集成高性能車載計(jì)算平臺(tái),結(jié)合深度學(xué)習(xí)技術(shù),擴(kuò)展車輛智能化水平。通過接入遠(yuǎn)程智能服務(wù)實(shí)現(xiàn)智能擴(kuò)展與共享,將人工智能技術(shù)的新突破應(yīng)用于無人駕駛。
2、面向不同等級(jí)的自動(dòng)駕駛進(jìn)行傳感感器優(yōu)化配置
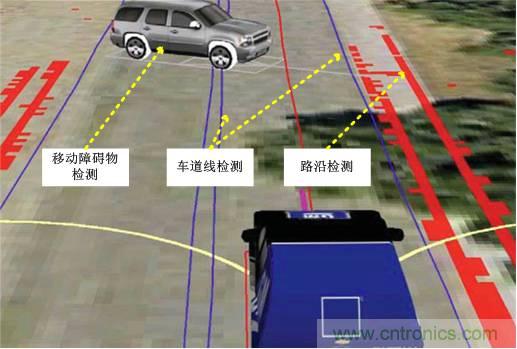
現(xiàn)階段常用的外部傳感器,只在某些特定情況下適用,精確感知需要進(jìn)行多傳感器信息融合。例如,毫米波雷達(dá)可以準(zhǔn)確檢測(cè)前方車輛的距離和速度,具備較強(qiáng)的穿透霧、煙、灰塵的能力;但無法對(duì)目標(biāo)進(jìn)行細(xì)化識(shí)別。而相機(jī)視覺系統(tǒng)可以獲得車道線、交通信號(hào)等目標(biāo)的顏色和形狀等細(xì)節(jié),從而進(jìn)行深度識(shí)別。但是相機(jī)視覺系統(tǒng)的測(cè)距能力沒有激光雷達(dá)精確。激光雷達(dá)通過點(diǎn)云來建立周邊環(huán)境的3D模型,可以檢測(cè)出包括車輛、行人、樹木、路緣等細(xì)節(jié)。所以,通過激光雷達(dá)或毫米波雷達(dá)與視覺傳感器進(jìn)行融合,不僅可以進(jìn)行目標(biāo)物體檢測(cè),而且還能進(jìn)行目標(biāo)空間測(cè)距,目標(biāo)圖像識(shí)別等功能。類似,GPS定位、視覺傳感器和激光雷達(dá)進(jìn)行融合,則可以實(shí)現(xiàn)車道保持所需的高精度定位,也能實(shí)現(xiàn)多類障礙物目標(biāo)檢測(cè)。
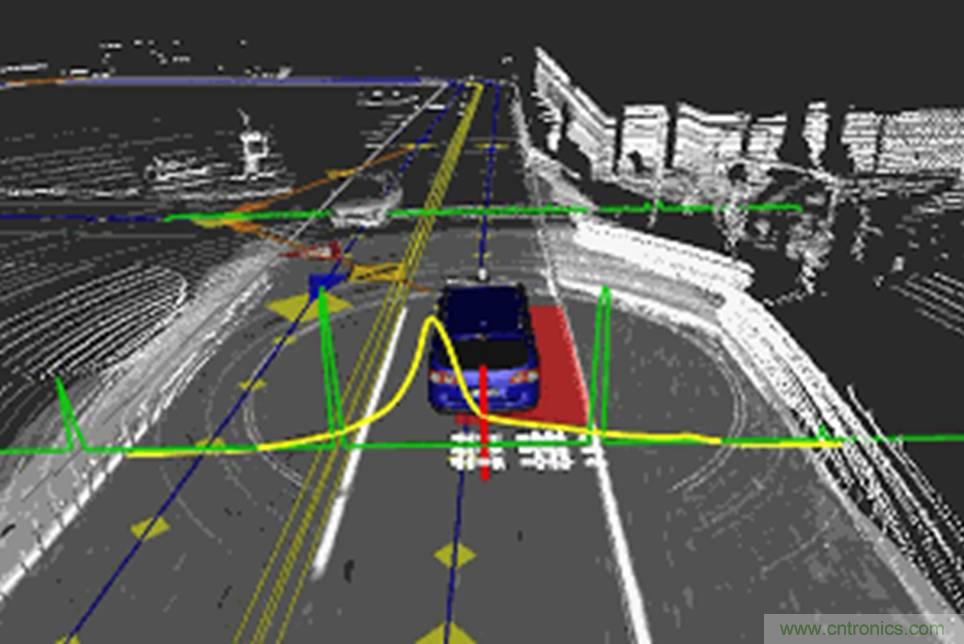
基于激光雷達(dá)等傳感器的環(huán)境感知模型
近期特斯拉汽車事故說明要做到高級(jí)自動(dòng)駕駛僅靠單類傳感器則難以實(shí)現(xiàn),而是需要多種傳感器融合,特別是關(guān)鍵性傳感器不能減配。無人駕駛汽車的車載傳感器配置可作為完整性參考方案。
1、車載傳感器選擇參數(shù)
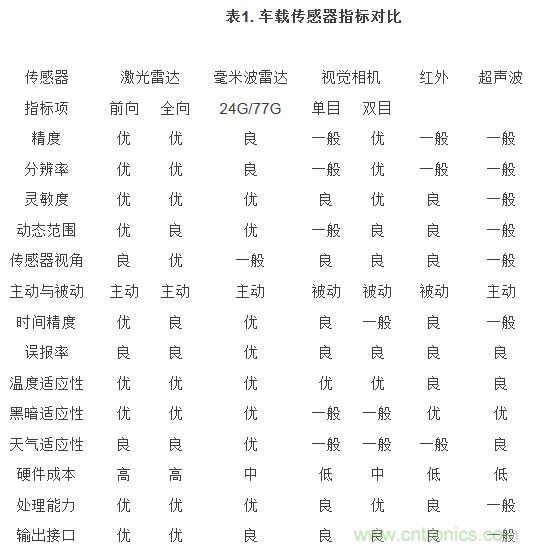
在選擇車載傳感器時(shí),一般需要綜合考慮多個(gè)方面的屬性,包括傳感器精度、分辨率、靈敏度、動(dòng)態(tài)范圍、傳感器視角、主動(dòng)與被動(dòng)傳感器、時(shí)間精度和輸出接口。以及誤報(bào)率、溫度適應(yīng)性、黑暗適應(yīng)性、不良天氣適應(yīng)性、硬件成本、信號(hào)處理能力等。表1是常見的幾類傳感器綜合指標(biāo),包括超聲波雷達(dá)、激光雷達(dá)、毫米波雷達(dá)、攝像頭、紅外探頭等,可以綜合考慮加以選取配置。
注:
(1)傳感器精度:真實(shí)值和傳感器的測(cè)量值之間的誤差,取決于外部干擾等因素。
(2)傳感器分辨率:兩次測(cè)量值之間的最小方差,通常比傳感器的實(shí)際精度更低。
(3)傳感器靈敏度:可檢測(cè)或測(cè)量的最小值。
(4)傳感器的動(dòng)態(tài)范圍:最小以及可以準(zhǔn)確地報(bào)告最大值。
(5)傳感器視角:描述傳感器可以看到的視場(chǎng)角度。
(6)主動(dòng)與被動(dòng)傳感器:有源傳感器主動(dòng)感測(cè)環(huán)境,無源傳感器則比較依賴環(huán)境條件。
(7)傳感器時(shí)間精度:傳感器的刷新速率和測(cè)量帶寬變化頻率
(8)傳感器輸出接口:輸出模擬電壓,電流,數(shù)字信號(hào),串口或網(wǎng)絡(luò)數(shù)據(jù)流等方式。
(9)低誤報(bào)率:由于噪聲、干擾等引起檢測(cè)結(jié)果誤報(bào)的比例。
(10)溫度適應(yīng)性:是否能在不同溫度條件下正常工作。
(11)黑暗適應(yīng)性:是否能在不同光照條件下正常工作。
(12)不良天氣適應(yīng)性:是否能在下雨、揚(yáng)塵、潮濕等天氣中正常工作。
(13)低成本硬件:傳感器硬件價(jià)格成本。
(14)信號(hào)處理能力:傳感器數(shù)據(jù)量。
2、實(shí)現(xiàn)不同等級(jí)的自動(dòng)駕駛所需傳感感器
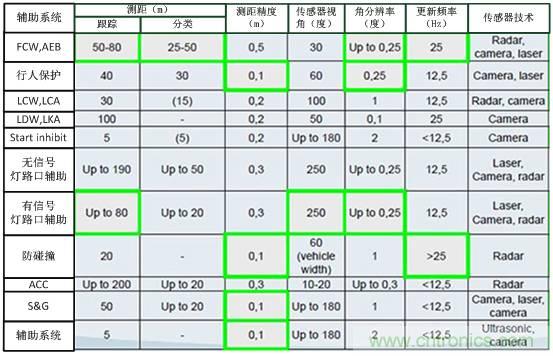
在不同等級(jí)的自動(dòng)駕駛功能實(shí)現(xiàn)中,通過對(duì)雷達(dá)、激光雷達(dá)、視覺相機(jī)(單目、雙目和紅外)、超聲波等常見傳感器的優(yōu)劣勢(shì)分析,最終形成適當(dāng)?shù)能囕d傳感器配置。
表2. 實(shí)現(xiàn)不同自動(dòng)駕駛功能所需傳感器及感知參數(shù)分析
如下圖所示,要實(shí)現(xiàn)典型的自動(dòng)駕駛功能,要求車載傳感器能夠覆蓋長(zhǎng)、短距檢測(cè)、兼顧日夜行駛等需求。典型方案中要求配備毫米波雷達(dá)傳感器6個(gè)(超長(zhǎng)距前窄角1個(gè),中距前窄角1個(gè),后/側(cè)面廣角4個(gè))、紅外夜視傳感器1個(gè)(長(zhǎng)距前窄角)、圖像攝像頭6個(gè)(長(zhǎng)距前窄角1個(gè),短距廣角后方1個(gè)、側(cè)面4個(gè))、以及超聲波傳感器4個(gè)(前/后側(cè)短距廣角)。
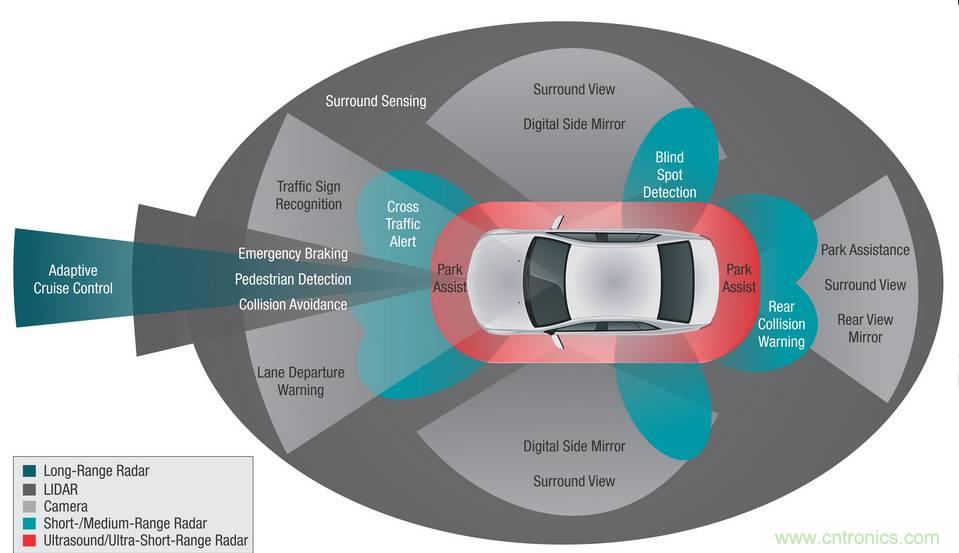
實(shí)現(xiàn)自動(dòng)駕駛系統(tǒng)所需的車載傳感器配置
而要實(shí)現(xiàn)無人駕駛,除了上述傳感器之外,還需要選配高精度GPS定位系統(tǒng)及高精度測(cè)距傳感器,還需要應(yīng)對(duì)復(fù)雜路況的各類激光雷達(dá)傳感器等。如圖5所示,參加DARPA Urban Challenge比賽的Stanford 大學(xué)“Junior”無人車,則在大眾SUV基礎(chǔ)上,配備5個(gè)激光雷達(dá)(IBEO,Riegl,SICK和Velodyne),1個(gè)Applanix GPS慣性導(dǎo)航系統(tǒng),5個(gè)BOSCH毫米波雷達(dá),以及前向相機(jī)系統(tǒng)。
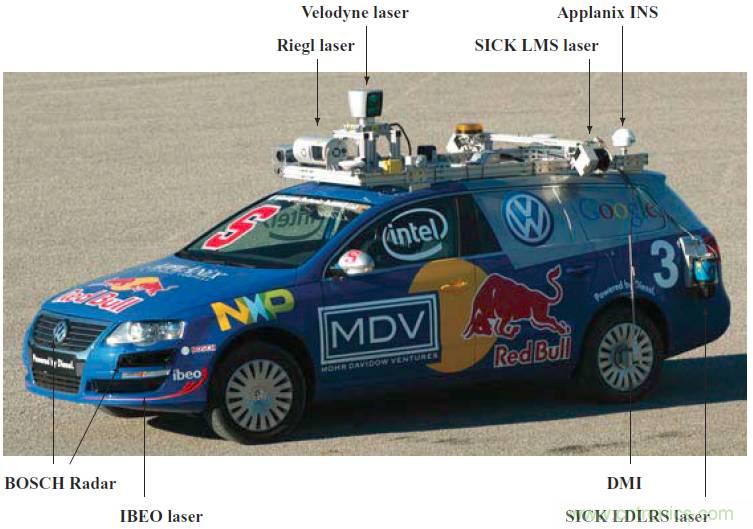
Junior無人駕駛車輛及其傳感器配置
Junior無人駕駛車輛定位通過Applanix POS LV 420集成慣性導(dǎo)航系統(tǒng)實(shí)現(xiàn),包括GPS方位航向測(cè)量、高性能慣性測(cè)量單元、車輪里程計(jì)(DMI)和OMNISTAR衛(wèi)星虛擬基站服務(wù),提供低于100厘米和0.1度的實(shí)時(shí)位置和方向誤差。2個(gè)側(cè)向的SICK LMS 291-S14激光雷達(dá)和1個(gè)前向的RIEGL LMS-Q120激光雷達(dá)提供3D道路結(jié)構(gòu)和車道標(biāo)線檢測(cè),并進(jìn)行車輛高精度定位。1個(gè)車頂64線Velodyne HDL-64E激光雷達(dá)用于障礙物和移動(dòng)車輛檢測(cè),形成水平方向360度和垂直方向30度視域的掃描數(shù)據(jù),由車尾的2個(gè)SICK LDLRS激光雷達(dá)和前保險(xiǎn)杠2個(gè) IBEO ALASCA XT激光雷達(dá)進(jìn)行視野補(bǔ)充。5個(gè)安裝在前格柵的BOSCH長(zhǎng)距離雷達(dá)(LRR2)提供周圍移動(dòng)車輛的檢測(cè)信息。由兩個(gè)英特爾四核服務(wù)器通過一個(gè)千兆以太網(wǎng)進(jìn)行連接來提供傳感器融合等車載計(jì)算服務(wù)。
3、通過車載傳感器集成與智能化降低整體費(fèi)用
通過車載傳感器集成與智能化與能夠突破自動(dòng)駕駛技術(shù)所需的環(huán)境感知基礎(chǔ)支撐,通過配置優(yōu)秀和價(jià)格低廉的車載傳感器,實(shí)現(xiàn)環(huán)境感知,推進(jìn)無人駕駛技術(shù)進(jìn)展。如圖6所示,現(xiàn)有的車載傳感器通過各類總線技術(shù)進(jìn)行集成和配置,再通過傳感器信息的智能化處理,輸出自動(dòng)駕駛所需的環(huán)境感知信息。
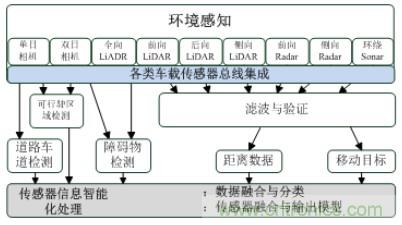
車載傳感器集成與智能化
同樣,智能車輛也需要從車身內(nèi)的傳感器的智能化與集成內(nèi)容入手,分析實(shí)現(xiàn)自動(dòng)駕駛需要哪些車載傳感器。通過融合車載的IMU、車頭指向設(shè)備和GPS等傳感器進(jìn)行車輛位姿精確感知,實(shí)現(xiàn)車輛控制。
現(xiàn)有車輛設(shè)計(jì)還沒有考慮智能化需求,車身載傳感器的種類較多,分布在各個(gè)子系統(tǒng)中,有一些傳感器重復(fù)使用。下一階段,更多考慮智能化功能需求,并且通過傳感器的微型化、多功能和智能化、集成化發(fā)展。通過MEMS傳感器實(shí)現(xiàn)微型化;通過集成多功能、減少車載傳感器數(shù)量,提高車輛姿態(tài)感知可靠性;通過傳感器與微處理器結(jié)合集成智能化處理算法,減少ECU復(fù)雜度。通過傳感器總線集成,可以實(shí)現(xiàn)車身傳感器信息共享,降低了成本。例如,速度傳感器、加速度傳感器、加速踏板位置傳感器、節(jié)氣門位置傳感器、方向盤轉(zhuǎn)角傳感器等信息,可以智能車輛的各個(gè)子控制系統(tǒng)功能模塊中共享。

車載自身姿態(tài)感知傳感器方案
3、擴(kuò)展環(huán)境感知能力和降低對(duì)傳感器依賴
3.1通過V2X車輛聯(lián)網(wǎng)擴(kuò)展智能車環(huán)境感知能力
通過V2X應(yīng)用可以擴(kuò)展車載傳感器感知范圍,通過多車之間溝通各自速度、加減速和轉(zhuǎn)向等信息,提高自動(dòng)駕駛安全性,為交通的可預(yù)測(cè)和管控提供基礎(chǔ)。通過V2X應(yīng)用廣播前車的環(huán)境感知結(jié)果,使得施工、交通事故、道路異物、坑洞和路滑等情況可以預(yù)先告知后車,有效提高自動(dòng)駕駛安全。使智能車輛的環(huán)境感知范圍擴(kuò)大,不再受限于車載傳感器的視距范圍限制,減少了多變的天氣和復(fù)雜環(huán)境因素影響。
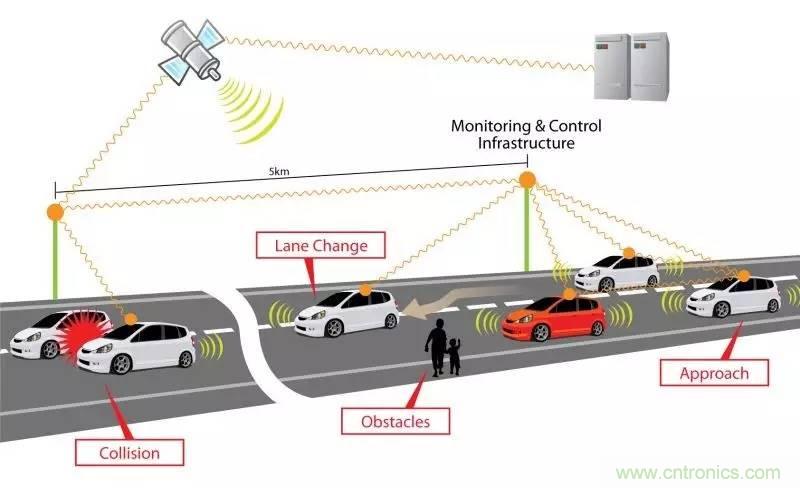
基于V2X技術(shù)擴(kuò)展智能車輛感知能力
通過V2X網(wǎng)絡(luò)互聯(lián)到云端,可以獲得更大范圍的環(huán)境信息,擴(kuò)展了實(shí)時(shí)導(dǎo)航和路徑規(guī)劃等服務(wù)。在沒有網(wǎng)絡(luò)信號(hào)的地方,通過本地通訊服務(wù),在幾百米范圍內(nèi)形成車間局域網(wǎng)絡(luò),形成一個(gè)幾公里范圍的視野,更容易實(shí)現(xiàn)安全的自動(dòng)駕駛。
現(xiàn)階段較多采用IEEE802.11P等短距通訊來構(gòu)建DSRC短程車間網(wǎng)絡(luò),更大范圍的網(wǎng)絡(luò)基于LET-V等技術(shù)來構(gòu)建,還包括LTE標(biāo)準(zhǔn)(LTE V2X)技術(shù),通過LTE-Direct (LTE-D)技術(shù)能尋找500m內(nèi)數(shù)千車載設(shè)備并提供服務(wù),讓最接近的LTE-D設(shè)備實(shí)現(xiàn)通訊。此外,正在發(fā)展中的5G網(wǎng)路技術(shù)也可為車載應(yīng)用構(gòu)建基礎(chǔ)支撐。DSRC之類短距通訊已經(jīng)開展并通過了一系列的現(xiàn)場(chǎng)測(cè)試,進(jìn)入實(shí)際部署工作;而LTE V2X等新技術(shù)還在開發(fā)階段,需要制定新標(biāo)準(zhǔn)和開展更多測(cè)試。
3.2基于高精度定位和3D高精度地圖支持降低對(duì)傳感器依賴
智能車輛都采用GPS或者北斗等全球定位系統(tǒng)進(jìn)行定位和導(dǎo)航,現(xiàn)階段還需要提高定位系統(tǒng)的精度,提供高精度導(dǎo)航地圖來滿足自動(dòng)駕駛需求。通過提供厘米級(jí)的定位以及應(yīng)對(duì)復(fù)雜駕駛環(huán)境的精確三維地圖數(shù)據(jù),智能車輛獲得最佳行車路線,地形特征,位置映射等,方便進(jìn)行動(dòng)態(tài)目標(biāo)檢測(cè)和障礙物檢測(cè)等,極大降低對(duì)傳感器依賴。
1、高精度定位系統(tǒng)
民用級(jí)GPS在接收到4個(gè)或更多衛(wèi)星時(shí)能提供約為十米級(jí)的定位精度,差分GPS((Differential Global Positioning System)通過在位置已經(jīng)精確測(cè)定的已知點(diǎn)上配備一臺(tái) GPS 接收機(jī)作為固定地面參考點(diǎn),參考點(diǎn)和定位設(shè)備間利用廣播等方式增加一步位置修正,可以達(dá)到米級(jí)定位精度。要實(shí)現(xiàn)厘米級(jí)精度的定位,還需要將GPS設(shè)備和高精度慣性測(cè)量單元(IMU)結(jié)合起來,GPS提供高精度定位數(shù)據(jù),慣性測(cè)量單元提供高頻率采集數(shù)據(jù)。例如,在自動(dòng)駕駛方案中采用Applanix POS的系統(tǒng)提供多雙頻GPS接收信息實(shí)時(shí)集成,包括GPS方位航向測(cè)量、高性能慣導(dǎo)測(cè)量單元(6自由度、安裝靠近后軸處)、車輪里程計(jì)(DMI)、OMNISTAR衛(wèi)星虛擬基站服務(wù)等,系統(tǒng)實(shí)時(shí)位置誤差通??傻陀?00厘米,方向誤差低于0.1度。這些高精度定位方法成本較貴,限制了實(shí)際大范圍應(yīng)用。后續(xù)需要集成基于低功耗、低價(jià)、微小型智能定位傳感器,提供高精度定位服務(wù)。

Applanix POS LV420系統(tǒng)
2、高精度導(dǎo)航地圖
目前所用導(dǎo)航地圖所提供信息的精細(xì)程度還無法滿足自動(dòng)駕駛要求。通過采用激光雷達(dá)獲取三維點(diǎn)云數(shù)據(jù),并進(jìn)行人工標(biāo)記之后建立路面模型,包含道路上較為全面的交通標(biāo)志、交通信號(hào)燈等信息,還包括車道線位置、數(shù)量和寬度等信息,包括道路坡度和斜率等,還包括車道限高、下水道口、障礙物以及其他道路上一些細(xì)節(jié)。地圖既可以提供當(dāng)前道路的靜態(tài)環(huán)境模型,也可以通過預(yù)先存儲(chǔ)的點(diǎn)云和圖像特征數(shù)據(jù)來提供高精度定位。
在高精度地圖技術(shù)路線中,一類是谷歌和Here的激光雷達(dá)和攝像頭獲取3D點(diǎn)云數(shù)據(jù)測(cè)量的地圖,在點(diǎn)云數(shù)據(jù)基礎(chǔ)上進(jìn)而建模分類得到高精度地圖。另外一類是通用、大眾聯(lián)手Mobileye的RoadBook眾包地圖,通過車輛攝像頭和GPS,結(jié)合本地以及云端軟件來開展高精度地圖服務(wù)。
高精度地圖需要使用高精度激光雷達(dá),收集數(shù)據(jù)后進(jìn)行人工標(biāo)記才能使用,比較耗時(shí)費(fèi)力,測(cè)繪成本較高,不會(huì)頻繁更新數(shù)據(jù),實(shí)用性下降。采用眾包方式收集數(shù)據(jù),通過每輛車載終端得到車道線、各項(xiàng)道路標(biāo)志以及道路上的基礎(chǔ)交通設(shè)施等信息發(fā)送云端,雖然精度不如激光雷達(dá)測(cè)定,但通過增加數(shù)據(jù)量來提高精度,可以降低成本,并且實(shí)時(shí)更新地圖。例如,Mobileye通過EyeQ4系統(tǒng)上增加更多檢測(cè)設(shè)備并整合其軟件系統(tǒng),結(jié)合道路經(jīng)驗(yàn)管理系統(tǒng)(RoadExperience Management,REM),利用深度學(xué)習(xí)技術(shù)來對(duì)道路上各種行車要素的識(shí)別和采集,最后構(gòu)建Roadbook。REM根據(jù)駕駛環(huán)境來綜合分析路況,如前車運(yùn)動(dòng)軌跡、路邊靜止的物體等信息,得到合適的可行駛路線。所采集信息在本地進(jìn)行預(yù)處理之后得到近處以一維數(shù)據(jù)為主的表示,結(jié)合必要的三維數(shù)據(jù),最終讓地圖信息保持較小規(guī)模,方便及時(shí)上傳與下載更新。通過多車輛的學(xué)習(xí)和完善,云端系統(tǒng)將會(huì)比人類駕駛員更熟練地處理復(fù)雜交通場(chǎng)景,有利于克服自主駕駛面臨的困難挑戰(zhàn)。
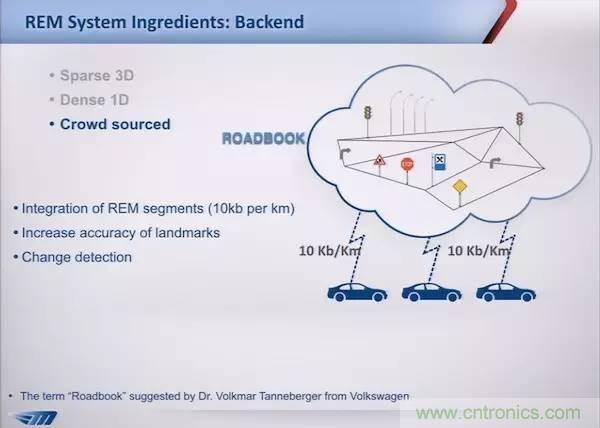
圖10.Roadbook高精度導(dǎo)航地圖
高精度地圖是實(shí)現(xiàn)自動(dòng)駕駛和無人駕駛不可或缺的基礎(chǔ)支撐,許多企業(yè)開始開發(fā)定制化地圖,包括Here(奧迪寶馬和戴姆勒)發(fā)布的HDLive地圖、Mobileye發(fā)布RoadBook、TOMTOM為蘋果、Uber和Bosch提供地圖數(shù)據(jù),發(fā)布RoadDNA,大陸的RoadDB(RoadDatabase),以及車企如豐田推出的全新地圖繪制技術(shù),國內(nèi)百度、高德、四維圖新和武漢光庭等公司開發(fā)的高精度地圖等。
4、面向自動(dòng)駕駛的車載集成系統(tǒng)
通過全新的面向智能車輛的架構(gòu)設(shè)計(jì),結(jié)合集成化控制系統(tǒng)和新型總線,將傳感器和智能計(jì)算單元進(jìn)行配置和集成,將可為自動(dòng)駕駛提供基礎(chǔ)架構(gòu)支撐。
4.1面向自動(dòng)駕駛的新型車輛總線控制架構(gòu)
無人駕駛技術(shù)離不開車載控制系統(tǒng)的深度集成,由于車企保護(hù)做法,許多車輛總線系統(tǒng)還沒對(duì)外開放,現(xiàn)在還有許多實(shí)現(xiàn)方案是不對(duì)原車做任何改動(dòng),直接附加一套電機(jī)裝置,類似于ADAS測(cè)試中使用的ADB機(jī)器人,但這種方法安全性極低。自動(dòng)駕駛車輛的執(zhí)行器改裝主要分為轉(zhuǎn)向、制動(dòng)和油門改裝等部分。由于沒有車企的支持,現(xiàn)有一些自動(dòng)駕駛方案中還是通過外加轉(zhuǎn)向機(jī)器人、制動(dòng)機(jī)器人和油門機(jī)器人的方式來實(shí)現(xiàn)對(duì)車的控制。由于這類改裝方式,需要外部控制系統(tǒng),例如剎車采用電機(jī)拉動(dòng)鋼絲繩,鋼絲繩連在剎車踏板上,剎車的反應(yīng)時(shí)間增加,可靠性和實(shí)時(shí)控制都降低,無法體現(xiàn)無人駕駛的優(yōu)勢(shì)。

設(shè)計(jì)復(fù)雜的自動(dòng)駕駛機(jī)器人
而基于線控技術(shù)集成的自動(dòng)駕駛系統(tǒng)將極大提高智能車輛的可靠性和操控性能。自動(dòng)駕駛方案中動(dòng)力、轉(zhuǎn)向和制動(dòng)(部分還包括懸掛)三個(gè)系統(tǒng)需要X-by-wire線控技術(shù)。得到車企和博世等零部件供應(yīng)商支持的自動(dòng)駕駛方案中,能夠通過車輛內(nèi)部CAN通信的方式實(shí)現(xiàn)對(duì)EPS、ESP等執(zhí)行機(jī)構(gòu)的準(zhǔn)確控制。此外,在純電動(dòng)或者混動(dòng)車基礎(chǔ)上改裝具備線控(液壓)剎車的配置,將具有很大的優(yōu)勢(shì)。
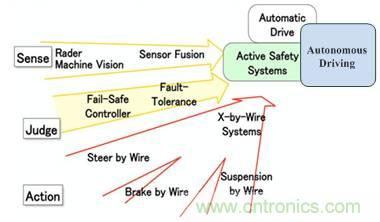
基于線控技術(shù)的自動(dòng)駕駛方案
現(xiàn)階段,還需要通過一種可行的通用集成方案,將控制系統(tǒng)集成到CAN總線、Flexray或者快速以太網(wǎng)總線上。通過將決策控制信息與車輛底層控制系統(tǒng)深度集成。CAN FD 1.0作為CAN 2.0的技術(shù)升級(jí),可以作為智能車輛車載總線的實(shí)現(xiàn)方式。此外,由于智能車輛技術(shù)發(fā)展,急需滿足更高數(shù)據(jù)帶寬的車內(nèi)連接。Tesla在車載信息服務(wù)上采用以太網(wǎng)作為總線網(wǎng)絡(luò)。例如,基于IEEE802.3bp的1000BASE-T1標(biāo)準(zhǔn)草案設(shè)計(jì),滿足汽車系統(tǒng)嚴(yán)格的EMI要求,支持車內(nèi)傳輸多路高清視頻流。單對(duì)雙絞線以太網(wǎng)允許選擇輕量型、低成本線束。
4.2、車載高性能集成計(jì)算平臺(tái)
智能車輛一旦完成車身完整構(gòu)建,采用傳感器獲得環(huán)境感知信息,還需要能夠處理大容量數(shù)據(jù),所以處理器芯片對(duì)無人駕駛車輛同樣重要。許多移動(dòng)終端產(chǎn)品芯片供應(yīng)商已經(jīng)開始為自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)提供圖像處理功能。由于嵌入式平臺(tái)計(jì)算能力提升,現(xiàn)在智能車輛計(jì)算平臺(tái)一般采用帶有GPU單元的嵌入式處理器來構(gòu)建。例如高通、三星也推出了車載嵌入式平臺(tái),高通驍龍602A應(yīng)用處理器,拓展面向汽車的產(chǎn)品組合,實(shí)現(xiàn)多系統(tǒng)支持的感知功能;三星處理器芯片目前主打車機(jī)互聯(lián)系統(tǒng)、汽車智能硬件等。
在奧迪自動(dòng)駕駛汽車架構(gòu)中的駕駛輔助控制器(zFAS)中的傳感器融合單元核心部件是NVIDIATegra K1平臺(tái),極大簡(jiǎn)化了車載計(jì)算平臺(tái)。NVIDIA的TK1有四個(gè)ARMCortex-A15核,192Kepler GPU集成CUDA,提供327GFLOPS計(jì)算性能,處理CUDA數(shù)據(jù)時(shí)功率小于6W(包括SoC和DRAM)。英偉達(dá)Drive PX無人駕駛汽車平臺(tái)的兩個(gè)Tegra X1處理器,能夠處理來自12個(gè)攝像頭的數(shù)據(jù)流,完成驅(qū)動(dòng)高級(jí)駕駛員輔助功能運(yùn)行。最新的DRIVE PX 2硬件計(jì)算平臺(tái),支持12路攝像頭輸入、激光定位、雷達(dá)和超聲波傳感器;包括兩顆新一代NVIDIA Tegra處理器,其中包括8個(gè)A57核心和4個(gè)Denver核心;基于NVIDIA的新一代GPU架構(gòu)Pascal設(shè)計(jì),單精度計(jì)算能力達(dá)到8TFlops,超越TITAN X的10倍以上的深度學(xué)習(xí)計(jì)算能力。

NVIDIA DRIVE PX 2自動(dòng)駕駛開發(fā)平臺(tái)
NVIDIA開發(fā)網(wǎng)提供算法庫支持,有助于加速開發(fā)。NVIDIA建造NvidiaPX2構(gòu)建的Drivenet平臺(tái),已在自動(dòng)駕駛車輛上進(jìn)行測(cè)試。能夠?qū)⑼獠總鞲衅鳙@取的圖像數(shù)據(jù)處理后形成高精度點(diǎn)云,并上傳至云端服務(wù)器,經(jīng)過更高性能的基于DGX-1的服務(wù)器處理后,融合成完整高精度地圖。車載計(jì)算平臺(tái)和云端服務(wù)器形成NVIDIA完整的自動(dòng)駕駛技術(shù)平臺(tái)解決方案。
流行的深度學(xué)習(xí)框架如Caffe、Theano、Torch推出CUDA工具庫,大幅提高圖像識(shí)別準(zhǔn)確率,讓車載計(jì)算平臺(tái)擁有更強(qiáng)的數(shù)據(jù)處理能力,通過運(yùn)行深度學(xué)習(xí)算法來加強(qiáng)車輛感知能力,對(duì)車載各類傳感器數(shù)據(jù)進(jìn)行處理與分析,進(jìn)行駕駛決策。

深度學(xué)習(xí)的車載嵌入式計(jì)算平臺(tái)
5、結(jié)語
智能車輛研發(fā)已經(jīng)進(jìn)入關(guān)鍵節(jié)點(diǎn),其技術(shù)突破的難點(diǎn)已經(jīng)從算法研究轉(zhuǎn)移到了面向自動(dòng)駕駛的車載傳感器、車輛總體架構(gòu)設(shè)計(jì)、智能計(jì)算平臺(tái)集成等實(shí)用化技術(shù)上。本文結(jié)合多年的智能車研發(fā)經(jīng)歷,聚焦在環(huán)境感知技術(shù)及車載傳感器、車輛系統(tǒng)集成、V2X和車聯(lián)網(wǎng)、高精度定位和地圖技術(shù)、深度學(xué)習(xí)和計(jì)算平臺(tái)等方面上,針對(duì)這些可能的突破點(diǎn)進(jìn)行探討,其中內(nèi)容可作為智能車輛研發(fā)的參考。
【作者簡(jiǎn)介:黃武陵,中國科學(xué)院自動(dòng)化研究所副研究員,中國科學(xué)院大學(xué)博士,主要從事智能車輛研究,參與和主持了多項(xiàng)國家863和973、交通部和自然基金課題,發(fā)表SCI/EI論文十多篇,申請(qǐng)和獲得發(fā)明專利二十多項(xiàng)。獲北京市科技進(jìn)步獎(jiǎng)、北京市“金橋工程”項(xiàng)目獎(jiǎng)、吳文俊人工智能科學(xué)技術(shù)進(jìn)步獎(jiǎng)、中科院教學(xué)成果獎(jiǎng)等獎(jiǎng)勵(lì)。】
參考資料: [1] en.wikipedia.org/wiki/ [2] 新智元公眾號(hào) [3] http://www.cheyun.com [4] www.nvidia.com/object/drive-px.html [5] Jaycil Z. Varghese, Overview of Autonomous Vehicle Sensors and Systems,Proceedings of the 2015 International Conference on Operations Excellenceand Service Engineering [6] Junior: The Stanford Entry in the Urban Challenge, Michael Montemerlo,Jan Becker, .., and Sebastian Thrun. 2008. Junior: The Stanford entry in theUrban Challenge. J. Field Robot. 25, 9 (September 2008), 569-597. [7] C. Urmson, J. Anhalt, D. Bagnell,., , “Autonomous driving in urbanenvironments: Boss and the urban challenge,” J. Field Robot.,vol. 25, no. 1,pp. 425–466, Jun. 2008. [8] W. Huang, D. Wen, J. Geng, N.-N. Zheng, "Task-Specific performanceevaluation of UGVs: Case studies at the IVFC," IEEE Transactions on Intelligent Transportation Systems, vol. 15,no. 5, pp. 1969-1979, 2014. [9] 黃武陵. 無人駕駛汽車帶來的交通便利[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2016,16(6):6-8. [10] 黃武陵.智能車輛環(huán)境感知技術(shù)與平臺(tái)構(gòu)建[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2016,(7). [11] 黃武陵.智能車輛的道路檢測(cè)及其應(yīng)用[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2016,(8).
推薦閱讀:



