【導(dǎo)讀】3D體感的技術(shù)是光學(xué)精密儀器與制造、模式識別、圖形圖像、機器學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)技術(shù)集大成者,跨越多個領(lǐng)域的高精尖技術(shù)。3D體感核心技術(shù)包括3D拍攝、人物提取和骨架識別。我們來淺析一下3D體感技術(shù)每個核心環(huán)節(jié)的技術(shù)特點。
3D體感的技術(shù)是光學(xué)精密儀器與制造、模式識別、圖形圖像、機器學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)技術(shù)集大成者,跨越多個領(lǐng)域的高精尖技術(shù)。所以,在2010年微軟Kinect推出以來,鮮有第二家公司和研究機構(gòu)完全突破體感交互的所有技術(shù)環(huán)節(jié)。3D體感核心技術(shù)包括3D拍攝、人物提取和骨架識別。我們來淺析一下3D體感技術(shù)每個核心環(huán)節(jié)的技術(shù)特點。
一、骨架識別技術(shù)
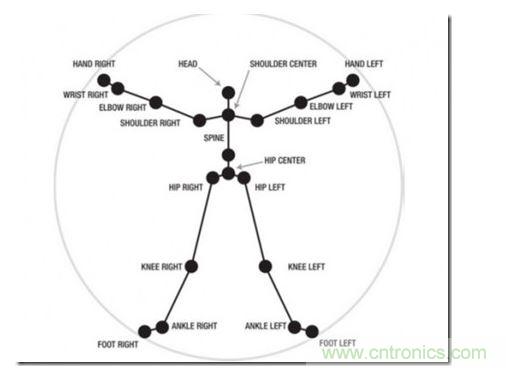
骨架識別的技術(shù)解決方案主要由數(shù)模邏輯推理和機器學(xué)習(xí)兩種方案。數(shù)模邏輯推理是通過有人體的某個關(guān)鍵可識別的關(guān)節(jié)點,通過人體特征推理出人體每個關(guān)節(jié)點的位置,這種方法簡單易實現(xiàn),但是人體是柔性、易變形,隨機動態(tài)變化的,沒有一種邏輯推理方案能夠把人體的運動給模擬出來,導(dǎo)致識別準確率不高沒有實用價值。這就是OMEK(被Intel收購)和Softkinetic(Intel合作伙伴)幾年也不能推出商用化產(chǎn)品的原因。機器學(xué)習(xí)的方法是通過大集群計算機“學(xué)習(xí)”幾千甚至萬億的人體行為樣本,來得到基本人體行為模型,就像小孩子成長的過程。但是機器學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)是近幾年來逐步興起的技術(shù),還不是太成熟,選擇什么樣的“學(xué)習(xí)”方法和什么樣的特征樣本是至關(guān)重要的,是需要不斷試驗的。但是大集群計算機計算本身成本就異常的高,動則千萬人民幣,沒有扎實的研究基礎(chǔ),一般廠商不敢輕易嘗試。
二、人物提取技術(shù)
對于人物提取來說,就是要把復(fù)雜的動態(tài)的環(huán)境去除,把真實的“人”提取出來。這個在工程上也是有較高的難度,比如人與桌子接觸,人與人握手和人體被局部遮擋。抽象理解就是人體分割和人物跟蹤在現(xiàn)有的基礎(chǔ)條件下,不會有完全精確的解決辦法,只是相對的解決。
人體的動作是三維的,當(dāng)然對人體動作的測量也必須是三維的。3D拍攝或測量技術(shù)實際上是相對比較成熟的技術(shù),具有多種解決方案,比如單彩色攝像頭,雙彩色攝像頭,光干涉,超聲波、結(jié)構(gòu)光散斑和TOF(測量光的飛行時間)等等。除了TOF,其他的測量方式可以說都是基于三角測距的原理,不同在于對特征點的提取的不同。
對于人體動作來說最主要的難題就是三維測量的實時性和3D測量數(shù)據(jù)對骨架識別的適用性,人眼的反應(yīng)時間一般小于120毫秒,也就是說3D測量到骨架識別最大允許時間必須小于100毫秒,才能夠與應(yīng)用對接,這就要求三維測量的計算量不能太大,要不然成本太高就不適合消費級產(chǎn)品使用。
三、3D拍攝技術(shù)
彩色攝像頭是以顏色和紋理為基礎(chǔ)的,光線細微的變化都會帶來圖像處理上較大的差別,對于紋理的細微分別決定了彩色攝像頭只能局限在近距離(0.8米以內(nèi)),這就是我們可以看到三維拍攝的圖像都是黑白的灰度圖的原因。彩色圖像顏色提取的方式,抗光線和同色系干擾的能力極差,原理上決定很難把不同的物體區(qū)隔出來,得到的三維圖像體感也是無法使用的。這就是為什么leapmotion必須是室內(nèi)向上拍攝,通過LED把手掌點亮的原因。
光干涉的原理精度高,但是計算原理就決定了該方法計算量超大,為了減小計算,就要想辦法省略掉物體的整體構(gòu)建,只計算物體的邊緣輪廓。但是物體的邊緣輪廓的三維信息根本就做不出骨架識別的訓(xùn)練算法。Intel的realsense,還有Pepplesinterface面臨的困境,可以三維測量,卻不可以體感。
Primisense的結(jié)構(gòu)光散斑測量方法,就是在測量精度和計算量上面向體感技術(shù)做出平衡的最優(yōu)方案之一。Primesense的精度為厘米級,判斷人體動作已經(jīng)足夠了。
TOF的方案分辨率很難再提高了,而且測量光飛行時間的晶振芯片和攝像頭模組技術(shù)難度太高,從圖像質(zhì)量和成本的角度,TOF在很長一段時間仍然落后于結(jié)構(gòu)光方案。超聲波的精度太低,遠距離實用性不強。