【導(dǎo)讀】由于CCD驅(qū)動器的電壓幅度降低了,使得CCD驅(qū)動器的自身功耗大幅度下降。由于共模扼流圈的差模電感很小,有效地避免了和CCD的容性負載產(chǎn)生諧振,因此本方案可以保證驅(qū)動信號的質(zhì)量。對方案所設(shè)計的電路進行了電路板制作和測試。實驗結(jié)果表明,該方案中所設(shè)計的電路在保證驅(qū)動信號質(zhì)量的前提下,可以有效地降低驅(qū)動電路的功耗。
電荷耦合器件(CCD)在光電成像領(lǐng)域獲得了廣泛的應(yīng)用,它具有高速、低噪聲、寬動態(tài)范圍以及線性響應(yīng)等優(yōu)點,然而要使CCD 正常工作,需要成像電路的支持。其中,CCD驅(qū)動電路是成像電路的重要組成部分,驅(qū)動電路負責(zé)把CCD收集的電荷包通過移位寄存器移動到輸出節(jié)點進行信號電壓的輸出。由于是串行移位,因此需要高速的驅(qū)動電路,而在高速成像領(lǐng)域,驅(qū)動電路的工作速度更高。此外,CCD驅(qū)動波形的電壓幅度往往很高,而CCD的移位寄存器是電容性負載,高速大電壓幅度驅(qū)動電容性負載需要較大的功耗,因此,基于CCD 的成像系統(tǒng)功耗都相對較大,功耗大會導(dǎo)致CCD驅(qū)動器溫度較高,溫度高會影響系統(tǒng)的可靠性和壽命。
針對這個問題,采用CCD 驅(qū)動器首先產(chǎn)生低電壓的驅(qū)動信號,然后利用共模扼流圈進行電壓的放大。由于CCD 驅(qū)動器的電壓降低了,使得CCD 驅(qū)動器的自身功耗大幅度下降。由于共模扼流圈的差模電感很小,可以有效避免和CCD 的容性負載產(chǎn)生諧振,因此可以保證驅(qū)動信號的質(zhì)量。
CCD驅(qū)動電路分析
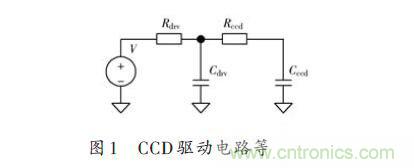
為了設(shè)計高速低功耗CCD 驅(qū)動電路,首先對CCD驅(qū)動電路進行建模分析。圖1所示為CCD 驅(qū)動電路的等效模型。其中V 為驅(qū)動器的信號輸出,Rdrv 代表驅(qū)動器的戴維寧等效內(nèi)阻,Cdrv 代表驅(qū)動器的等效電容,Rccd代表CCD內(nèi)部的走線等效串聯(lián)電阻,Cccd代表CCD的等效負載電容??梢奀CD 驅(qū)動電路為RC 充放電電路。
對于RC電路,其功耗可以用公式(1)近似給出。
式中:C 為電容值大小;V 為信號電壓幅度大??;f 為信號的工作頻率。公式中并不包含電阻R 的項,而實際上功耗則都消耗在電阻R 上,因為電容是不會消耗功耗的。對于相同的電容C ,當(dāng)電阻值R 較大時,瞬態(tài)電流值較小但瞬態(tài)電流持續(xù)時間較長;當(dāng)電阻值R 較小時,瞬態(tài)電流值較大但瞬態(tài)電流持續(xù)時間較短。這是公式中沒有電阻R 項的原因。
公式(1)還指出功耗和電壓的平方是成正比的。因此只要把電壓幅度降低就能大幅度降低功耗。而 CCD的驅(qū)動電壓往往很高,例如很多CCD 的復(fù)位脈沖驅(qū)動電壓幅度可以達到10 V.驅(qū)動電路的功耗由驅(qū)動器的功耗和CCD的功耗兩部分組成。驅(qū)動器的功耗是由于驅(qū)動器內(nèi)部的寄生電容導(dǎo)致的。例如CCD 驅(qū)動器EL7457 的內(nèi)部電容約為80 pF。通過共模扼流圈對電壓放大可以使得驅(qū)動器的輸出電壓幅度下降,這樣就可以有效地降低驅(qū)動器的功耗。
基于共模扼流圈的驅(qū)動電路設(shè)計
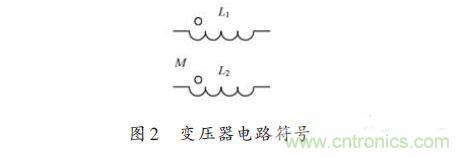
共模扼流圈是一個緊密耦合的1∶1變壓器,其漏電感較小。圖2所示為變壓器的電路符號,其由線圈電感L1 和線圈電感L2 組成,其互感為M 。當(dāng)L1 = L2 = M時,該變壓器就是共模扼流圈。
分析此類含有耦合電感的電路,采用的方法是去耦等效受控源,如圖3 所示。把具有耦合的電路拆分成兩個獨立的支路進行分析。公式(2)和(3)給出具體的計算方法。
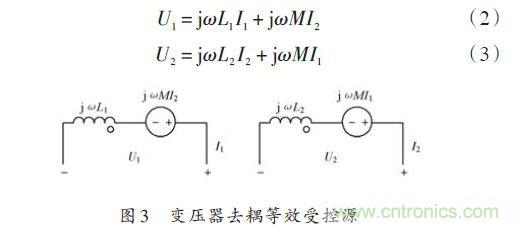
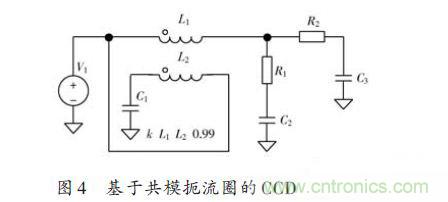
根據(jù)上述公式可知,當(dāng)差模信號通過共模扼流圈時,由于磁通量相互抵消,所以就像共模扼流圈不存在一樣;當(dāng)共模信號通過共模扼流圈時,由于磁通量相互疊加,所以共模扼流圈具有很大的阻抗。這里采用共模扼流圈實現(xiàn)高速CCD驅(qū)動的電路拓撲[4]如圖4所示。圖中V1 代表CCD 驅(qū)動器,L1 和L2 組成共模扼流圈,其同名端在圖中用小圓圈標(biāo)出。C1 為交流耦合電容,避免變壓器直流短路。R1 和C2 為端接網(wǎng)絡(luò),用于抵消共模扼流圈的漏電感。R2 代表CCD的等效串聯(lián)電阻,C2 代表CCD的等效負載電容。共模扼流圈在該電路中的作用是把輸入信號的電壓幅度放大2倍。其工作原理為輸入信號分別從L1 和L2 的非同名端加入。那么L2 產(chǎn)生的磁通會在L1 的兩端產(chǎn)生感應(yīng)電壓,該感應(yīng)電壓和加在L1端的電壓疊加從而實現(xiàn)了電壓的2倍放大。R1和C2 的取值需要在實際的電路板調(diào)試時進行調(diào)整以保證輸出信號達到最佳。
采用了上述電路后,把CCD驅(qū)動器的電壓幅度降低了1/2,因此CCD 驅(qū)動器的功耗也會下降為原來的1/4.
然而由于R1 和C2 端接網(wǎng)絡(luò)的存在,會使得功耗會有所上升。但是和直接用驅(qū)動器進行驅(qū)動相比,功耗還是大幅度下降。
實驗結(jié)果
為了實際驗證設(shè)計的電路,進行了電路板設(shè)計制作和測試。測試板的驅(qū)動器和共模扼流圈的電路布局如圖5所示,CCD驅(qū)動器為Intersil公司的EL7457,驅(qū)動器的供電為5 V。
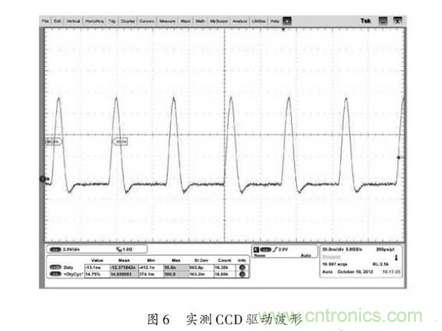
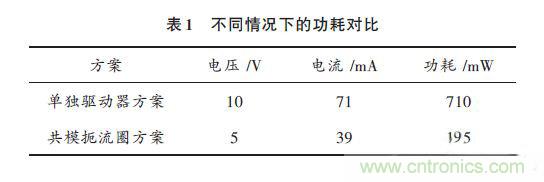
共模扼流圈采用TDK 公司的ACM4520-901-2P,CCD 采用75 pF 的電容模擬其負載情況。端接網(wǎng)絡(luò)R1和C2 的取值分別為100 Ω和47 pF.這樣通過共模扼流圈后的驅(qū)動信號電壓被放大為10 V。圖6所示為實測的CCD驅(qū)動波形,該波形是CCD的復(fù)位脈沖,其頻率為12.5 MHz,其占空比設(shè)計為12.5%,實際波形的占空比和設(shè)計值相符。直接采用驅(qū)動器10 V供電驅(qū)動CCD時的電流為71 mA,功耗為710 mW;而采用該電路后,電流為39 mA,功耗為195 mW,如表1所示??梢姴捎霉材6罅魅篁?qū)動器的功耗大幅度下降。兩種情況下實測功耗都比理論值大,這是因為電路板有較長的走線,走線的寄生電容導(dǎo)致的功耗。