
【導(dǎo)讀】太陽能應(yīng)用中的電壓和電流測量需采用隔離測量技術(shù)。 DSP Sinc輸入以及ADIAD7401A隔離式ADC恰好提供ADI 信號鏈的一個示例,實現(xiàn)這種隔離測量。
本文介紹采用ADSP-CM403xy和AD7401A器件,并由 ADI設(shè)計的測量應(yīng)用典型信號鏈。
太陽能光伏逆變器系統(tǒng)
太陽能光伏逆變器轉(zhuǎn)換來自太陽能面板的電能并高效地 將其部署到公用電網(wǎng)中。來自太陽能面板的電能基本上 屬于直流源,它會被轉(zhuǎn)換成交流,并與電網(wǎng)頻率成一定的相位關(guān)系,饋送至公用電網(wǎng)上,且效率極高。轉(zhuǎn)換可 以采用單級,也可以采用多級(見圖1)。第1級通常為 DC-DC轉(zhuǎn)換,其中太陽能面板的低電壓與高電流輸出轉(zhuǎn) 換為高電壓與低電流。這樣做的目的是為了將電壓提升 至與電網(wǎng)峰值電壓兼容的水平。第2級通常將直流電壓 和電流轉(zhuǎn)換為交流電壓和電流,一般使用H-電橋拓撲。
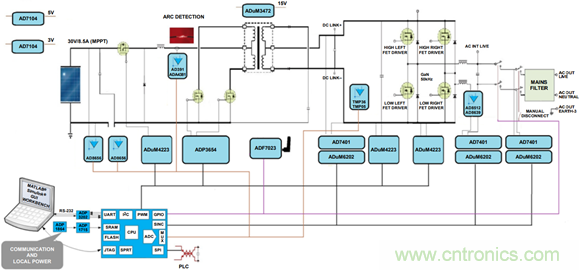
圖1. 太陽能光伏逆變器信號鏈(ADI公司)
ADC理論—AD7401A
AD7401A是一款二階Σ-Δ調(diào)制器,片上的數(shù)字隔離采用 ADI公司的iCoupler® 技術(shù),能將模擬輸入信號轉(zhuǎn)換為高 速1位數(shù)據(jù)流。AD7401A采用5 V電源供電,可輸入±250 mV 的差分信號(滿量程±320 mV)。模擬調(diào)制器對模擬輸入信 號連續(xù)采樣,因而無需外部采樣保持電路。輸入信息以 數(shù)據(jù)流密度的形式包含在輸出數(shù)據(jù)流內(nèi),該數(shù)據(jù)流的最 高數(shù)據(jù)速率可到20 MHz。通過適當?shù)臄?shù)字濾波器(稱為 Sinc濾波器)可重構(gòu)原始信息。處理器側(cè)(非隔離)可采用 5 V或3 V電源 (VDD2)。
示例電路 – 描述
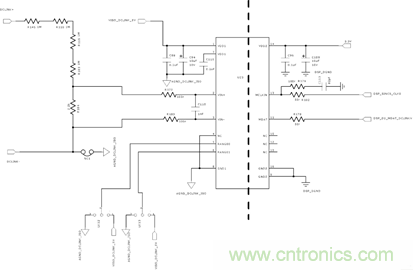
圖2. 隔離式電壓電路
Σ-Δ 調(diào)制器的交流輸入是一個交流正弦波,表示單相電網(wǎng) 發(fā)出的220 V rms信號。電阻分頻器將輸入范圍縮小到ADC 的額定輸入范圍。輸入濾波器可降低輸入端的噪聲。
Σ-Δ 調(diào)制器輸出包含兩個信號:來自ADSP-CM403xy DSP處理器的高速時鐘輸入,以及保持調(diào)制數(shù)據(jù)的數(shù)據(jù) 信號。該數(shù)據(jù)可直接輸入Sinc3濾波器,直接將數(shù)據(jù)轉(zhuǎn) 換為ADC結(jié)果。下文顯示該數(shù)據(jù)的一個示例。
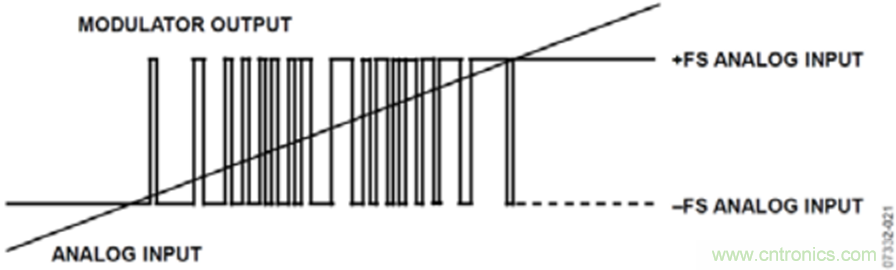
圖3. 調(diào)制器示例數(shù)據(jù)
在ADC的下限范圍內(nèi),輸入信號具有窄脈沖寬度,而在 上限范圍內(nèi)脈沖寬度幾乎達到其最大值。輸出數(shù)據(jù)通過 Sinc濾波器后,便如對角線所示。AD7401A工作電壓高 達891 V單極性范圍,或565 V雙極性范圍,并橫跨隔離 柵:20μm聚酰亞胺。更多有關(guān)這些內(nèi)容的信息以及各 種認證可在相關(guān)數(shù)據(jù)手冊中找到。
ADSP-CM403XY SINC3外設(shè)模塊
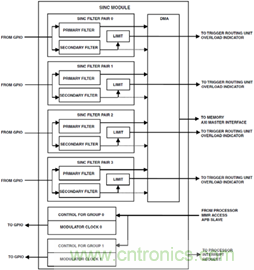
圖4. ADSP-CM403 Sinc外設(shè)框圖
框圖顯示4對Sinc濾波器(Sinc0至Sinc3)、2個調(diào)制器時鐘 源和2組控制寄存器(單元)。模塊接受4路來自GPIO輸 入引腳的Σ-Δ 位流,并將2個調(diào)制器時鐘源導(dǎo)入GPIO輸 出引腳。脈沖寬度調(diào)制(PWM)信號使調(diào)制器時鐘同 步,以獲得最佳的系統(tǒng)性能。每個Sinc濾波器對均包含 初級濾波器、次級濾波器、DMA接口和過載限值檢測 功能。初級Sinc濾波器通過DMA將其數(shù)據(jù)傳輸至存儲 器。次級Sinc濾波器產(chǎn)生過載信號,可通過觸發(fā)路由單 元(TRU)路由該信號,使PWM調(diào)制器產(chǎn)生跳變,生成 中斷。
使用AD7401A時,器件額定抽取速率(DR)為256,但也 可在其他抽取速率下使用該器件。
對于DR=256的情況而言,Sinc3濾波器的響應(yīng)見下文中 的圖5a和5b。
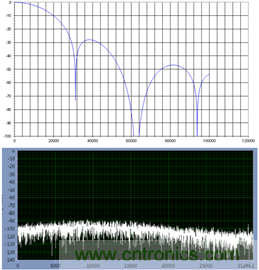
圖5. (a) Sinc3抽取速率=256 (b)模塊噪底
數(shù)字濾波器
Sinc濾波器的傳遞函數(shù)使其能用在數(shù)字邏輯中(使用一系 列求和與抽取函數(shù))。使用濾波器移除調(diào)制器采樣時 鐘,恢復(fù)采樣信號的數(shù)字值。濾波器設(shè)計匹配雙極性Σ-Δ 調(diào)制器,0 V輸入下具有50%脈沖密度,正輸入時超 過50%,而負輸入時不足50%,如圖6所示。
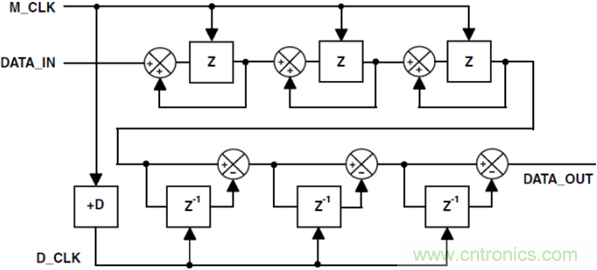
圖6. ADSP-CM403 Sinc濾波器框圖
數(shù)字濾波器是一組累加器,由調(diào)制器時鐘(M_CLK)驅(qū) 動,后接一組由抽取時鐘(D_CLK)驅(qū)動的微分器。 輸入 累加器將輸入位流轉(zhuǎn)換為多字節(jié)字,而輸出微分器獲取 位流的均值1密度。
累加器和微分器的級數(shù)可以為3或4,具體取決于濾波器 階數(shù)。濾波器的直流增益和帶寬為濾波器階數(shù)(O)和抽 取速率(D)的函數(shù),即調(diào)制器時鐘與抽取時鐘的比值。 Sinc濾波器傳遞函數(shù)由累加器與微分器的傳遞函數(shù)之積 確定,Z域內(nèi)的表達式為:
PWM和SINC數(shù)據(jù)對齊
Sinc外設(shè)時鐘和PWM本質(zhì)上運行在同樣的ADSP-CM403 系統(tǒng)時鐘下,典型值為100 MHz。PWM和Sinc可以同步 以便提供數(shù)據(jù),并且時間與速率恰好和控制算法一致。 通常與PWM電平波形對齊。下圖顯示使用Sinc輸入進行電網(wǎng)同步所需時序的示例。當PWM運行在20 kHz (50 μs) 時,PWM_SYNC信號(同步不同DSP的PWM模塊或外部 PWM時需要用到該信號)位于PWM波形中央,幾乎不 發(fā)生切換。若要對齊Sinc數(shù)據(jù),則AD7401A的時鐘速率 應(yīng)設(shè)為10.24 MHz,并且抽取速率為256(見AD7401A數(shù)據(jù) 手冊)。這將產(chǎn)生40 KHz (50μs)的16位字速率,兩倍于PWM 頻率。由于Sinc還可設(shè)為與PWM_SYNC輸出對齊(如下 框圖所示),Sinc現(xiàn)在能在每個PWM周期內(nèi)產(chǎn)生兩個數(shù) 據(jù)輸出。輸出字在SRAM中可用, 位置在下一個 PWM_SYNC信號位置處。顯然,它說明Sinc數(shù)據(jù)可用 于電網(wǎng)同步算法控制中。
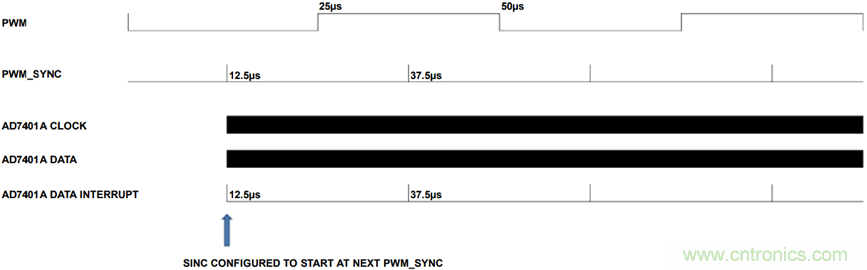
圖7. PWM與Sinc外設(shè)對齊(ADSP-CM403)
編程示例
/* SPECIFY DECIMATION RATE OPTIONS */
/* 256 */
// RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_PRIMARY,DECRATE_256, 0);
// RESULT = ADI_SINC_SETLEVELCONTROL (DEV, ADI_SINC_GROUP_0, 0, 0, SAMPLECOUNT_INTRATE, PSCALE_256); // PCINT INT RATE
/* 128 */
RESULT = ADI_SINC_SETLEVELCONTROL (DEV, ADI_SINC_GROUP_0, 0, 0, SAMPLECOUNT_INTRATE, PSCALE_128); // PCINT INT RATE
RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_PRIMARY,DECRATE_128, 0);
/* 64 */
RESULT = ADI_SINC_SETLEVELCONTROL (DEV, ADI_SINC_GROUP_0, 0, 0, SAMPLECOUNT_INTRATE, PSCALE_64); // PCINT INT RATE
RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_PRIMARY,DECRATE_64, 0);
/* SET SECONDARY RATE CONTROL “/
RESULT = ADI_SINC_SETRATECONTROL (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_SECONDARY, 8, 0);
RESULT = ADI_SINC_SETFILTERORDER (DEV, ADI_SINC_GROUP_0, ADI_SINC_FILTER_THIRD_ORDER, ADI_SINC_FILTER_THIRD_ORDER); RESULT = ADI_SINC_SETCIRCBUFFER(DEV, ADI_SINC_GROUP_0, SINC_CIRCBUFFER, CIRC_BUF_SIZE);
/* SET OVERLOAD AMPLITUDE DETECTION LIMITS TO 0 – FULLSCALE */
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_0, 0X0000, 0XFFFF);
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_1, 0X0000, 0XFFFF);
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_2, 0X0000, 0XFFFF);
RESULT = ADI_SINC_SETAMPLITUDELIMIT (DEV, ADI_SINC_PAIR_3, 0X0000, 0XFFFF);
/* SPECIFY MODULATOR CLOCK FREQUENCY, PHASE & STARTUP SYNCHRONIZATION */
RESULT = ADI_SINC_CONFIGMODCLOCK (DEV, ADI_SINC_GROUP_0, FSYSCLK, MODCLK, 0, FALSE); // UP TO 20MHZ
/* IT’S THE SAME CLOCK AS THE PWM – SO PWM AND SINC ARE SYNCHRONOUS */
RESULT = ADI_SINC_ENABLEMODCLOCK (DEV, ADI_SINC_GROUP_0, ADI_SINC_MOD_CLK_IMMEDIATE );
/* ASSIGN BUFFERS TO RECEIVE SINC DATA-AUTOMATICALLY DMA’D INTO SRAM IN THE ADSP-CM403*/
RESULT = ADI_SINC_SUBMITBUFFER(DEV, ADI_SINC_GROUP_0, SINCDATA0, NUM_SAMPLES);
/* ROUTE THE TRU INTERRUPT */
RESULT = ADI_SINC_ENABLEDATAINTERRUPT (DEV, ADI_SINC_GROUP_0, ADI_SINC_DATA_INT_0, TRUE);
/* ENABLE & ASSIGN USED SINC FILTER PAIR, AND SPECIFY INTERRUPT MASKS */
RESULT = ADI_SINC_SETCONTROLINTMASK (DEV, ADI_SINC_INT_EPCNT0|ADI_SINC_INT_EFOVF0|ADI_SINC_INT_EPCNT1|ADI_SINC_INT_EFOVF1);
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_0, ADI_SINC_GROUP_0, TRUE); // ACV_EXTERNAL
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_1, ADI_SINC_GROUP_0, TRUE); // ACV_INTERNAL
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_2, ADI_SINC_GROUP_0, TRUE); // DC LINK
RESULT = ADI_SINC_ENABLEPAIR(DEV, ADI_SINC_PAIR_3, ADI_SINC_GROUP_0, TRUE); // AC_CURRENT
/* WAIT AND READ FULL SINE WAVE INTO SRAM – START NEAR AC CROSSOVER. */
DO
{
PWM_SINC_LOOP=0;
GET_ADC_DATA_PWM();
}
WHILE ((SINC_VEXT_DATA[0] > 50) || (SINC_VEXT_DATA[0] < -50)) ; // START SINC AT 0 V MEASUREMENT-ALIGNS WITH SINEWAVE.
推薦閱讀:

