
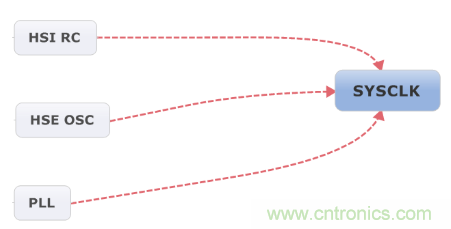
【導(dǎo)讀】以下是工程師結(jié)合自己的工作實(shí)戰(zhàn)經(jīng)驗(yàn)分享,總共有77條STM32知識(shí)匯總,建議收藏!SYSCLK時(shí)鐘源有三個(gè)來(lái)源:HSI RC、HSE OSC、PLL等。
1、 SYSCLK時(shí)鐘源有三個(gè)來(lái)源:HSI RC、HSE OSC、PLL
2、 MCO[2:0]可以提供4源不同的時(shí)鐘同步信號(hào),PA8
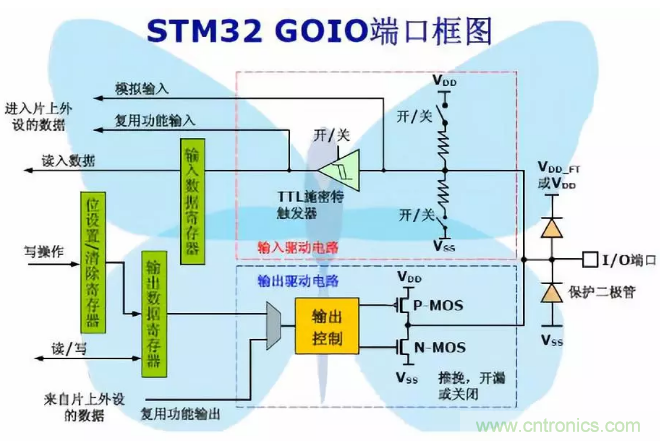
3、 GPIO口貌似有兩個(gè)反向串聯(lián)的二極管用作鉗位二極管。
4、 ICode總線,DCode總線、系統(tǒng)總線、DMA總線、總線矩陣、AHB/APB橋
5、在使用一個(gè)外設(shè)之前,必須設(shè)置寄存器RCC_AHBENR來(lái)打開(kāi)該外設(shè)的時(shí)鐘
6、 STM32復(fù)位有三種:系統(tǒng)復(fù)位、上電復(fù)位、備份區(qū)域復(fù)位。其中系統(tǒng)復(fù)位除了RCC_CSR中的復(fù)位標(biāo)志和BKP中的數(shù)值不復(fù)位之外,其他的所有寄存器全部復(fù)位。
觸發(fā)方式例如外部復(fù)位、看門(mén)狗復(fù)位、軟件復(fù)位等;電源復(fù)位由于外部電源的上電/掉電復(fù)位或者待機(jī)模式返回。
復(fù)位除了BKP中的寄存器值不動(dòng),其他全部復(fù)位;備份區(qū)域復(fù)位的觸發(fā)源為軟件復(fù)位或者VDD和VBAT全部掉電時(shí)。
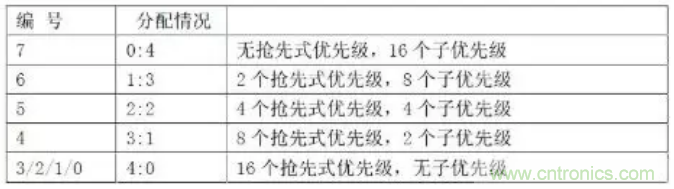
7、 (NestedVectored Interrupt Controller)NVIC嵌套向量中斷控制器,分為兩種:搶先式優(yōu)先級(jí)(可嵌套)和中斷優(yōu)先級(jí)(副優(yōu)先級(jí),不能嵌套)。
兩種優(yōu)先級(jí)由4位二進(jìn)制位決定。分配下來(lái)有十六種情況:
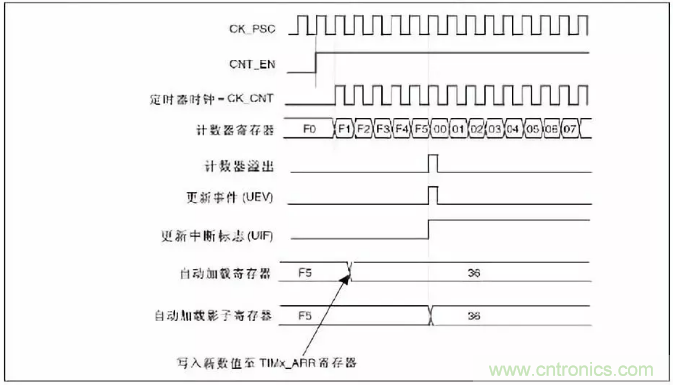
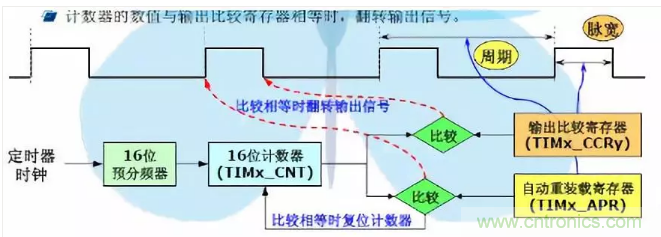
8、自動(dòng)裝載寄存器和影子寄存器:前者相當(dāng)于51當(dāng)中的溢出設(shè)定數(shù)值。而影子寄存器顧名思義是影子,就是寄存器的另一分copy。
實(shí)際起作用的是影子寄存器,而程序員操縱的則是自動(dòng)裝載寄存器。如果APPE位使能,表明自動(dòng)裝載寄存器的值在下一次更新事件發(fā)生后才寫(xiě)入新值。
否則,寫(xiě)入自動(dòng)裝載寄存器的值會(huì)被立即更新到影子寄存器。
9、
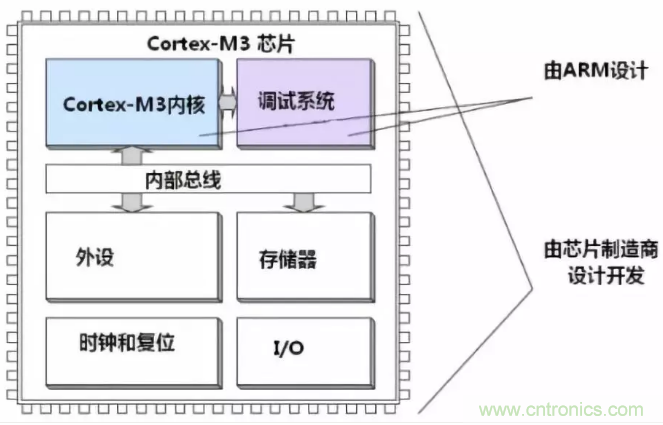
10、ARM公司只生產(chǎn)內(nèi)核標(biāo)準(zhǔn),不生產(chǎn)芯片。ST、TI這樣的公司從ARM公司那里購(gòu)買(mǎi)內(nèi)核,然后外加自己的總線結(jié)構(gòu)、外設(shè)、存儲(chǔ)器、始終和復(fù)位、I/O后就組成了自己的芯片。
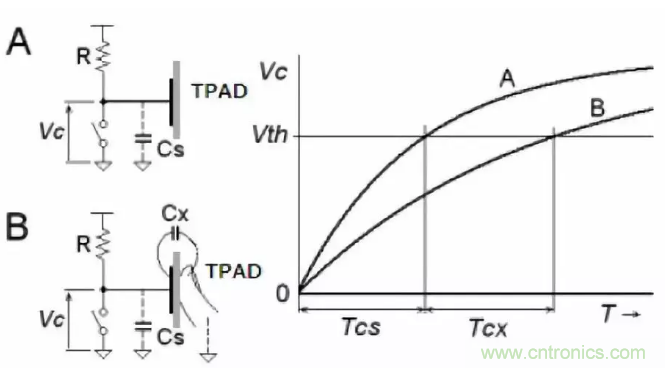
11、電容觸摸屏原理:通過(guò)充放電的曲線不同來(lái)檢測(cè)是否被按下。 實(shí)際的實(shí)驗(yàn)過(guò)程中,TPAD可以用一塊覆銅區(qū)域來(lái)替代,通過(guò)電容的充放電常數(shù)來(lái)確定是否按下。
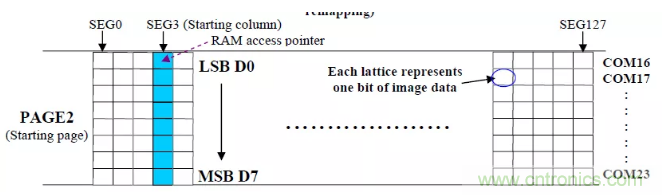
12、OLED,即有機(jī)發(fā)光二極管,又稱(chēng)為有機(jī)電激光顯示。下圖為OLED的GRAM與屏幕的對(duì)應(yīng)表
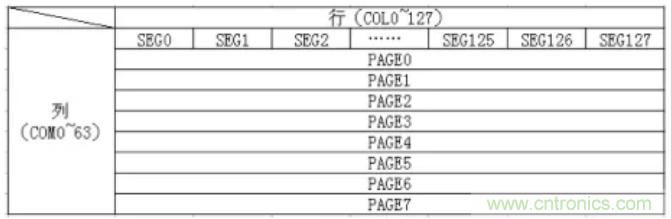
PAGE2單獨(dú)列出來(lái):
13、USART可以操縱SPI設(shè)備。不過(guò)最大頻率只有4.5MHz
14、使用I/O口時(shí)應(yīng)該注意的問(wèn)題

15、ADC的Vref+和Vdda與VSS,Vref-一定要加高質(zhì)量的濾波電容,切靠近單片機(jī)。

16、在STM32內(nèi)部,F(xiàn)SMC的一端通過(guò)內(nèi)部高速總線AHB連接到內(nèi)核Cortex-M3,另一端則是面向擴(kuò)展存儲(chǔ)器的外部總線。
內(nèi)核對(duì)外部存儲(chǔ)器的訪問(wèn)信號(hào)發(fā)送到AHB總線后,經(jīng)過(guò)FSMC轉(zhuǎn)換為符合外部存儲(chǔ)器通信規(guī)約的信號(hào),送到外部存儲(chǔ)器的相應(yīng)引腳,實(shí)現(xiàn)內(nèi)核與外部存儲(chǔ)器之間的數(shù)據(jù)交互。
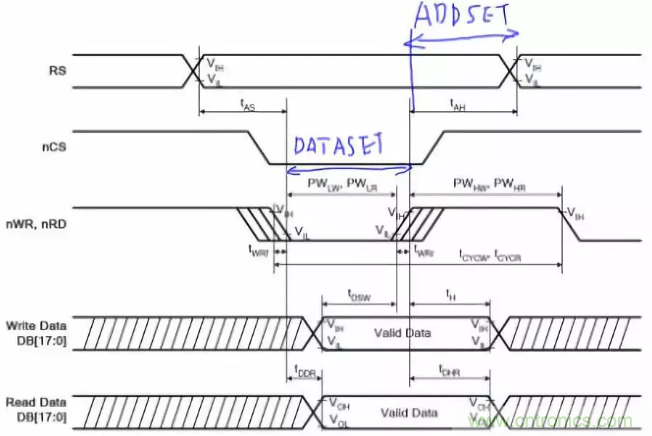
17、FSMC中的DATASET和ADDSET的設(shè)置需要參看外部存儲(chǔ)器的時(shí)序圖來(lái)確定。
一般而言,DATASET指的是數(shù)據(jù)建立時(shí)間,也就是讀/寫(xiě)信號(hào)開(kāi)始到讀/寫(xiě)信號(hào)停止(上升沿存儲(chǔ)數(shù)據(jù))的持續(xù)時(shí)間。(一般來(lái)說(shuō)寫(xiě)比讀快!)。
而ADDSET指的是地址建立時(shí)間,指的是片選之后到讀/寫(xiě)操作之前的時(shí)間,這是針對(duì)SRAM來(lái)說(shuō)的,如果操縱的是TFT,不存在地址線,所以此時(shí)的ADDSET就是讀/寫(xiě)信號(hào)結(jié)束到RS電平的轉(zhuǎn)換時(shí)間。
18、
19、

20、FSMC的三個(gè)配置寄存器:FSMC_BCRx(片選控制配置)、FSMC_BTRx(片選時(shí)序)、FSMC_BWTRx(片選寫(xiě)時(shí)序)。
21、RTC時(shí)鐘配置必須要用到BKP寄存器,BKP寄存器在單片機(jī)復(fù)位、電源復(fù)位、待機(jī)喚醒模式下是不會(huì)更改值的,他的供電由VDD供電,VDD被切斷后自動(dòng)切換至外部的VBAT供電。
22、要修改BKP寄存器的值,必須取消其寫(xiě)保護(hù)的標(biāo)志。BKP寄存器在上電時(shí)自動(dòng)寫(xiě)保護(hù)。
23、Stm32有三種省電模式:

三種省電模式中,耗電量從上到下依次降低,待機(jī)模式的電流僅為2uA。
24、從待機(jī)模式中喚醒單片機(jī)等效于讓單片機(jī)復(fù)位,但是電源寄存器的值會(huì)有一個(gè)標(biāo)志位指示單片機(jī)是被喚醒的,不是被復(fù)位的。
25、ADC的時(shí)鐘不要超過(guò)14MHz,否則轉(zhuǎn)換精度會(huì)下降。最大轉(zhuǎn)換速率為1MHz,即轉(zhuǎn)換周期為1us(14MHz,采樣周期為1.5個(gè)ADC時(shí)鐘)
26、Tcovn=采樣時(shí)間+12.5個(gè)周期。采樣時(shí)間盡量選長(zhǎng)一點(diǎn),這樣精度高一些,但是轉(zhuǎn)換速率下降,這也是有利必有弊。
27、
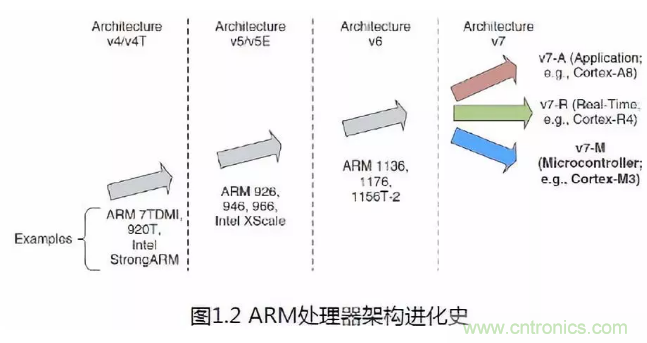
28、拿ARM7TDMI來(lái)說(shuō),T代表Thumb指令集,D是說(shuō)支持JTAG調(diào)試(Debugging),M意指快速乘法器,I則對(duì)應(yīng)一個(gè)嵌入式ICE模塊。
29、MMU作為嵌入式處理器與應(yīng)用處理器的分水嶺標(biāo)志à具有內(nèi)存管理單元的嵌入式處理器可以定位為應(yīng)用處理器。
這么說(shuō)M系列和A系列的處理器的區(qū)別在于A系列的處理器具有MMU單元可以進(jìn)行內(nèi)存模塊的管理。
30、ARM處理器有兩種狀態(tài):ARM狀態(tài)和Thumb狀態(tài)。
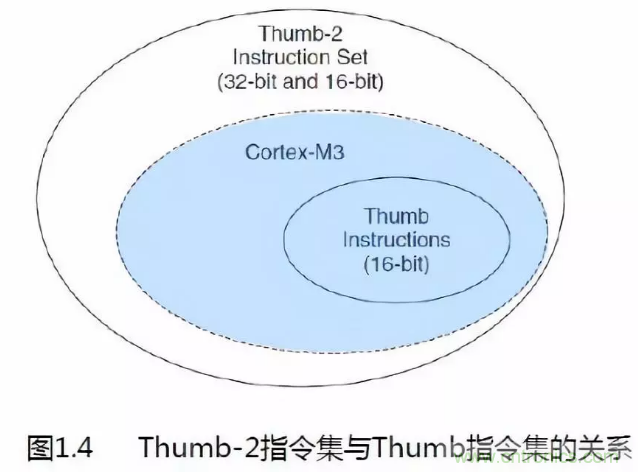
31、這張圖說(shuō)明了一切:Thumb2指令集做了一件很偉大的事情:將16位和32位的指令集融為一體,兼容性非常強(qiáng)?。ㄟ@么說(shuō)CM3不支持某些32位ARM指令集??)
32、

33、MSP是系統(tǒng)復(fù)位后使用的堆棧指針,PSP由用戶(hù)的代碼使用。兩個(gè)堆棧指針為4字節(jié)對(duì)齊??!
34、在ARM編程領(lǐng)域中,凡是打斷程序運(yùn)行的事件,統(tǒng)稱(chēng)為異常(exception)。
35、因?yàn)榇嬖贚R(鏈接寄存器),所以可支持1級(jí)的子程序調(diào)用而不用壓棧到內(nèi)存,大大提高了運(yùn)行速度。---à這就是說(shuō),我們?cè)诰幊痰臅r(shí)候,一級(jí)調(diào)用是不會(huì)耗費(fèi)太多時(shí)間的,除非是二級(jí)調(diào)用!
36、處理器有兩種操作模式:handler模式和線程模式。
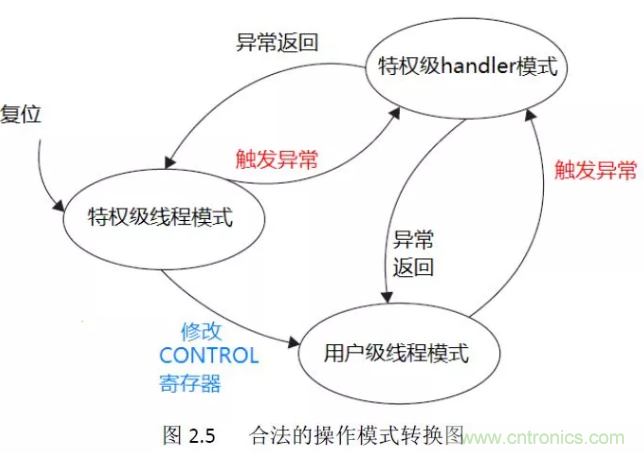
處理器也有兩種特權(quán)分級(jí):特權(quán)級(jí)和用戶(hù)級(jí)。 這張圖說(shuō)明了一切:復(fù)位進(jìn)入特權(quán)級(jí)線程模式,如果有異常,進(jìn)入特權(quán)級(jí)的handler模式處理異常或中斷例程,然后返回至特權(quán)級(jí)線程模式。通過(guò)修改CONTROL寄存器可以進(jìn)入用戶(hù)級(jí)線程模式。
37、兩個(gè)高級(jí)定時(shí)器TIM1和TIM8是掛接在APB1總線上
38、STM32的外部中斷是以組來(lái)區(qū)分的,也就是說(shuō)PA0,PB0,PC0單片機(jī)是無(wú)法區(qū)分其中哪個(gè)觸發(fā)的中斷à均為EXIT0線中斷服務(wù)例程。
所以,外部中斷支持16路的中斷分辨率。從另一個(gè)方面來(lái)講,我們可以設(shè)置GPIO_EXTILineConfig(GPIO_PortSourceGPIOx, GPIO_PinSourcex);來(lái)開(kāi)通中斷線實(shí)現(xiàn)組內(nèi)的不同中斷。
39、DAC有兩個(gè)寄存器,一個(gè)是DHR(Data HoldingRegister)數(shù)據(jù)保持寄存器,一個(gè)DOR(Data Output Register)數(shù)據(jù)輸出寄存器。
真正起作用的是DOR寄存器,該寄存器把值給數(shù)模轉(zhuǎn)換發(fā)生單元輸出以VREF+為參考電壓的電壓值。
如果是硬件觸發(fā)轉(zhuǎn)換,系統(tǒng)將在1個(gè)ABP時(shí)鐘周期后把值給DOR,如果是軟件觸發(fā)轉(zhuǎn)換,時(shí)間為3個(gè)APB時(shí)鐘周期。然后,均等待Tsetting時(shí)間(Typical為3us,Max為4us)后真正輸出電壓值。
40、DAC分8位模式和12位模式,其中后者可以選擇左右對(duì)齊
41、DMA仲裁器分為軟件和硬件兩種。軟件部分分為4個(gè)等級(jí),分別是很高優(yōu)先級(jí)、高優(yōu)先級(jí)、中等、低。硬件部分由通道的大小來(lái)決定優(yōu)先級(jí),越低優(yōu)先級(jí)越高。
42、DMA有一個(gè)實(shí)時(shí)的傳輸數(shù)據(jù)量寄存器叫做DMA_CNDTR,最大值為65535,存放的是當(dāng)前傳輸所要傳輸?shù)臄?shù)據(jù)量。當(dāng)數(shù)據(jù)量變?yōu)?時(shí),表明傳輸完成。
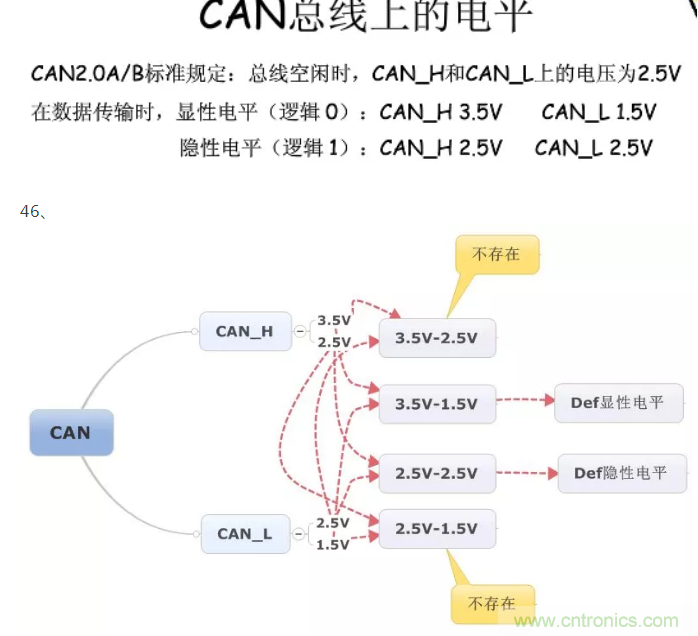
43、CAN總線(ControllerArea Network)。CAN控制器根據(jù)兩根線上的電位差來(lái)判斷總線電平,總線電平又分為顯性電平和隱性電平,二者必居其一。
44、CAN總線具有6個(gè)特點(diǎn):
1:多主控制
2:系統(tǒng)若軟性
3、通訊速度較快,通訊距離較遠(yuǎn)
4、具有錯(cuò)誤檢測(cè)、錯(cuò)誤通知和錯(cuò)誤恢復(fù)功能
5、故障封閉,當(dāng)總線上的設(shè)備發(fā)生連續(xù)故障錯(cuò)誤時(shí),CAN控制器會(huì)把改控制器踢出總線
6、連接節(jié)點(diǎn)多。理論上可以無(wú)限制加載,但是受到時(shí)間延遲和電氣負(fù)載的限制,實(shí)際數(shù)目是有限制的。降低傳輸速度可以適當(dāng)增加可掛接負(fù)載個(gè)數(shù)。
45、CAN協(xié)議有兩個(gè)標(biāo)準(zhǔn),ISO11898(針對(duì)125kbps~1Mbps的高速速率)和ISO11519-2(125kbps以下的低速速率)
47、CAN協(xié)議的有5種類(lèi)型的幀:數(shù)據(jù)幀、遙控幀、錯(cuò)誤幀、過(guò)載幀、幀間隔。其中前兩種幀有標(biāo)準(zhǔn)格式(11位ID)和擴(kuò)展格式(29位ID)。
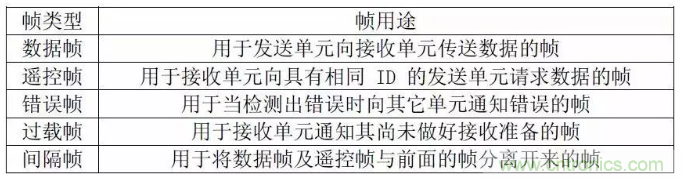
48、數(shù)據(jù)幀構(gòu)成:
(1) 幀起始。 表示數(shù)據(jù)開(kāi)的段幀起始。
(2) 仲裁段。 表示該幀優(yōu)先級(jí)的仲裁段。
(3) 控制段。 表示數(shù)據(jù)的字節(jié)及保留位段。
(4) 數(shù)據(jù)段。 數(shù)據(jù)的內(nèi)容,一幀可發(fā)送0~8個(gè)字節(jié)的數(shù)據(jù)。
(5) CRC段。 檢查幀的傳輸錯(cuò)誤段。
(6) ACK段。 表示確認(rèn)正常接收的段。
(7) 幀結(jié)束。 表示數(shù)據(jù)的段幀結(jié)束。

49、Stm32f103系列只有一個(gè)CAN控制器,有3個(gè)發(fā)送郵箱和3級(jí)深度的2個(gè)FIFO,14個(gè)過(guò)濾組器。
50、STM32的每個(gè)過(guò)濾組可以配置為1個(gè)32位過(guò)濾器和2個(gè)16位過(guò)濾器。除此之外,還可以配置為屏蔽位模式(ID+屏蔽)和標(biāo)識(shí)符列表(ID和屏蔽寄存器均用來(lái)做ID寄存器)模式。
51、CAN接收到有效報(bào)文被放置在3級(jí)郵箱深度的FIFO中,F(xiàn)IFO完全由硬件來(lái)管理。
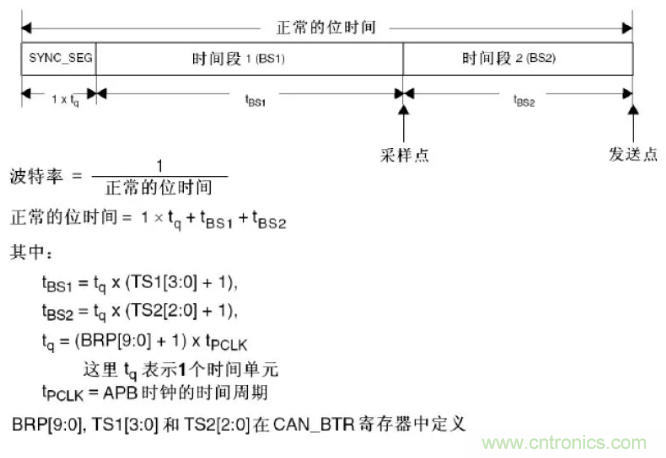
52、 CAN總線的波特率
53、觸摸屏一般分為電阻式觸摸屏和電容式觸摸屏。前者檢測(cè)觸摸的位置原理是利用觸摸屏控制器中的A/D轉(zhuǎn)換器經(jīng)過(guò)兩次A/D讀值后得出X和Y的坐標(biāo)值。注意:這個(gè)X和Y的值是相對(duì)于觸摸屏的,而非LCD屏。
所以在這里需要注意兩個(gè)概念:觸摸屏和LCD屏。這是兩個(gè)不同的概念,也是兩個(gè)不同的物理結(jié)構(gòu),其中電阻觸摸屏是由上下兩個(gè)導(dǎo)電層中間夾著一層非常薄的透明隔層;而LCD就是指顯示屏。
54、電阻觸摸屏有X和Y、X和Y的比例因子、坐標(biāo)軸方向、偏移量。LCD也有自己的這些參數(shù)。兩者完全不相干,所以在定位的時(shí)候需要進(jìn)行坐標(biāo)轉(zhuǎn)換。公式:
通過(guò)對(duì)屏幕的四個(gè)點(diǎn)進(jìn)行校準(zhǔn),得到四元一次方程,求解即可。
55、NEC協(xié)議的數(shù)據(jù)幀格式:同步碼頭、地址碼、地址反碼、控制碼、控制反碼。同步碼由一個(gè)9ms的低電平和一個(gè)4.5ms的高電平組成,地址碼、地址反碼、控制碼、控制反碼均是8位數(shù)據(jù)格式。按照低位在前,高位在后的順序發(fā)送。
56、NEC協(xié)議在發(fā)送的時(shí)候,會(huì)有560us的38KHz的載波信號(hào),而在接收的時(shí)候這部分載波信號(hào)被認(rèn)定為低電平,而剩余的(2.25ms-650us)的邏輯“1”和(1.12ms-650us)的邏輯“0”時(shí)間則被認(rèn)定為高電平。
57、在單位時(shí)間內(nèi)的位移被定義為速度,速度有線速度和角速度之分,分別對(duì)應(yīng)兩種傳感器測(cè)量這兩種不同的速度:線速度傳感器(加速度計(jì))、角速度傳感器(陀螺儀)。
前者多應(yīng)用在靜態(tài)或者低慢速運(yùn)動(dòng)中的姿態(tài)求解,后者多應(yīng)用在動(dòng)態(tài)運(yùn)動(dòng)中姿態(tài)求解。
58、根據(jù)標(biāo)準(zhǔn)約定,零加速度(或零 G 準(zhǔn)位)通常定義為相當(dāng)于最大輸出值(12 位輸出為 4096,10 位輸出為 1024 等)一半的輸出。對(duì)于提供 12 位輸出的加速度計(jì),零 G 準(zhǔn)位將等于 2048。
輸出大于 2048 表示正加速度。輸出小于 2048 表示負(fù)加速度。加速度的數(shù)量通常用單位 g (1g = 9.8m/s2 = 重力加速度)表示。
通過(guò)確定測(cè)量的輸出與零 G 準(zhǔn)位之間的差值,然后除以加速度計(jì)的靈敏度(用計(jì)數(shù)/g 或 LSB/g表示)來(lái)計(jì)算加速度。
對(duì)于提供 12 位數(shù)字輸出的 2g 加速度計(jì),靈敏度為 819 計(jì)數(shù)/g 或 819 LSB/g。加速度等于:a = (Aout - 2048)/(819 計(jì)數(shù)/g),單位為 g。
59、加速度計(jì)測(cè)得的加速度的方向和設(shè)備設(shè)定的坐標(biāo)系是相反的,因?yàn)樵肀砻髟跍y(cè)量力的時(shí)候采用的是非慣性系參考系,而我們高中時(shí)代研究的坐標(biāo)系是慣性系參考系,前者在物體進(jìn)行運(yùn)動(dòng)產(chǎn)生加速度時(shí),假想一個(gè)與速度方向相反的力作用在物體上,這個(gè)力就是慣性力;后者我們說(shuō)不存在慣性力,只說(shuō)存在慣性,因?yàn)樵趹T性坐標(biāo)系中,我們研究的是物體,而非坐標(biāo)系(即假定坐標(biāo)系相對(duì)地球靜止),當(dāng)我們把坐標(biāo)系也考慮在內(nèi)時(shí),當(dāng)坐標(biāo)系運(yùn)動(dòng),就產(chǎn)生了慣性力f,這種力作用會(huì)假想作用在物體上,只是與運(yùn)動(dòng)方向相反。
60、由上可知,加速度計(jì)的本質(zhì)是測(cè)量力而非加速度。
61、NRF24L01工作在2.4GHz的頻段,由于頻段頻率較高,所以傳輸速率較快,為2Mbps。
62、STM32的閃存模塊由:主存儲(chǔ)器、信息塊和閃存存儲(chǔ)器接口寄存器3個(gè)部分構(gòu)成。
主存儲(chǔ)器用來(lái)存放代碼和const常量;信息塊由兩個(gè)部分組成:?jiǎn)?dòng)程序代碼、用戶(hù)選擇字節(jié)。
其中啟動(dòng)程序代碼為ST公司自帶的啟動(dòng)程序,用于串口下載。
最后的閃存存儲(chǔ)器接口寄存器用于控制整個(gè)對(duì)閃存區(qū)域的操作。
63、CPU的運(yùn)行速度比FLASH的操作速度快的多,一般FLASH的最快訪問(wèn)速度≤24Mhz。如果CPU的速度超過(guò)這個(gè)頻率,那么在讀取FLASH的時(shí)候必須加入等待時(shí)間(FLASH_ACR設(shè)置)。
64、FLASH編程時(shí),寫(xiě)入必須為半字(16位)。并且在寫(xiě)入的時(shí)候必須保證所寫(xiě)區(qū)域的數(shù)據(jù)必須為0xFFFF。
65、STM32的FSMC有HADDR[27:0],其中[27:26]用來(lái)選擇BANK區(qū)域的4個(gè)不同塊。
剩下的[25:0]則用來(lái)連接外部存儲(chǔ)區(qū)域的地址線FSMC_A[25:0]。
如果數(shù)據(jù)寬度是8bit,此時(shí)的HADDR[25:0]和FSMC_A[25:0]是完全對(duì)應(yīng)的。
如果數(shù)據(jù)寬度是16bit,此時(shí)的HADDR[25:1]和FSMC_A[24:0]是對(duì)應(yīng)起來(lái)的。
需要注意:無(wú)論數(shù)據(jù)寬度是多少,外部的FSMC_A[0]和A[0]總是對(duì)應(yīng)的。
66、關(guān)于LB和UB的信號(hào)控制是由硬件自動(dòng)控制的,當(dāng)AHB的數(shù)據(jù)寬度小于外部存儲(chǔ)器的數(shù)據(jù)寬度時(shí),此時(shí)LB和UB的控制信號(hào)自動(dòng)產(chǎn)生(比如字節(jié)讀取/寫(xiě)入16bit的外部存儲(chǔ)器)。
67、 __attribute__ (函數(shù)屬性、變量屬性、類(lèi)型屬性等)。如果在使用SRAM時(shí),可以采用u32 sram_array[xx] __attribute__ ((at(0x68000000))代表將外部SRAM的空間全部給了sram_array這個(gè)變量,他具有在at0x68000000這個(gè)地址的屬性。
往里面寫(xiě)值就直接在SRAM里面寫(xiě)值。
68、
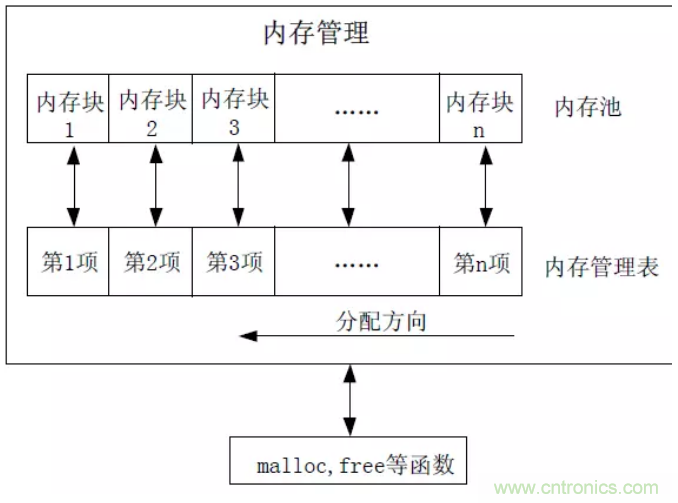
內(nèi)存管理有一種方式叫做分塊式內(nèi)存管理。
注意表中的分配方向,從頂?shù)降住C恳豁?xiàng)對(duì)應(yīng)一個(gè)內(nèi)存塊。里面的數(shù)值代表了內(nèi)存池的狀態(tài):如果為0,表示該內(nèi)存沒(méi)有被分配;如果非0,那么數(shù)值的大小就表示了該塊內(nèi)存被連續(xù)占用的內(nèi)存數(shù)。
比如說(shuō)數(shù)值為20,意思是包括該項(xiàng)在內(nèi)的內(nèi)存塊被連續(xù)占用了20塊分給了指針。
69、SD卡的分類(lèi):

一般的SD卡支持兩種傳輸模式:SD卡模式(SDIO)、SPI模式。顯然前面一種是專(zhuān)用模式,所以速度比較快。
70、常用的漢字內(nèi)碼系統(tǒng)有GB2313、GB13000、GBK、BIG5(繁體)。其中GB2313只有幾千個(gè)漢字,而GBK則有2萬(wàn)多漢字。
71、要顯示漢字,采用的方式如果用點(diǎn)陣的形式是不可取的,因?yàn)檫@無(wú)法查找漢字。采用的方式就是內(nèi)碼系統(tǒng)。
GBK標(biāo)準(zhǔn)中,一個(gè)漢字對(duì)應(yīng)2個(gè)字節(jié):前者稱(chēng)為區(qū)(0x81~0xFE)后者為(0x40~0x7E)和(0x80~0xFE)。前者有126個(gè)區(qū),后者有190,那么可以顯示的漢字?jǐn)?shù)量有126*190=23940個(gè)。
根據(jù)這兩個(gè)值用來(lái)查找字庫(kù),字庫(kù)中存放的還是每個(gè)漢字的點(diǎn)陣數(shù)據(jù)。
這個(gè)字庫(kù)非常大,如果是16*16的字體,那么一個(gè)字體就需要32個(gè)字節(jié),如此說(shuō)來(lái)需要23940*32=748K的空間,可見(jiàn)非常大,所以需要外部的Flash來(lái)存儲(chǔ)這個(gè)字庫(kù)。
72、由于漢字內(nèi)碼系統(tǒng)不具有國(guó)際通用性,但是Unicode幾乎把所有的語(yǔ)言都放置進(jìn)來(lái),這樣在單片機(jī)中操作漢字時(shí),就需要將GBK和Unicode轉(zhuǎn)化。
尤其是在FATFS中,創(chuàng)建中文文件名和讀取中文文件信息時(shí)需要將Unicode換轉(zhuǎn)為GBK后再進(jìn)行修改操作,再反轉(zhuǎn)換成Unicode保存修改。
這么說(shuō),兩者的存在是由于標(biāo)準(zhǔn)的不統(tǒng)一,并且Unicode中只有6064個(gè)漢字,而GBK顯然是一種漢字?jǐn)U展。
73、BMP圖片編碼的順序是從左到右,從下到上。
74、VS1053是一款高性能的數(shù)字音頻解碼芯片,從SD卡中將mp3等音樂(lè)音頻文件通過(guò)SPI送給VS1053后,由其進(jìn)行音頻解碼,輸出音樂(lè)給耳機(jī)。
耳機(jī)驅(qū)動(dòng)可以采用TDA1308芯片,這款芯片為AB類(lèi)耳機(jī)驅(qū)動(dòng)芯片。
75、IAP(In Application Programming)在應(yīng)用編程是為了后期開(kāi)發(fā)更新程序方便而提出的概念。具體的實(shí)現(xiàn)方法如下圖所示:

在普通編程中,flash中的code是通過(guò)JTAG和ISP等工具下載到單片機(jī)中。
而在IAP編程中,flash被分區(qū)為A和B兩個(gè)區(qū)域,A區(qū)域只允許用USB/USART等方式下載,此區(qū)域作為更新B區(qū)域的代碼用。
B區(qū)域則是用戶(hù)的code區(qū)域,真正的代碼在這里被執(zhí)行,放置的就是app。
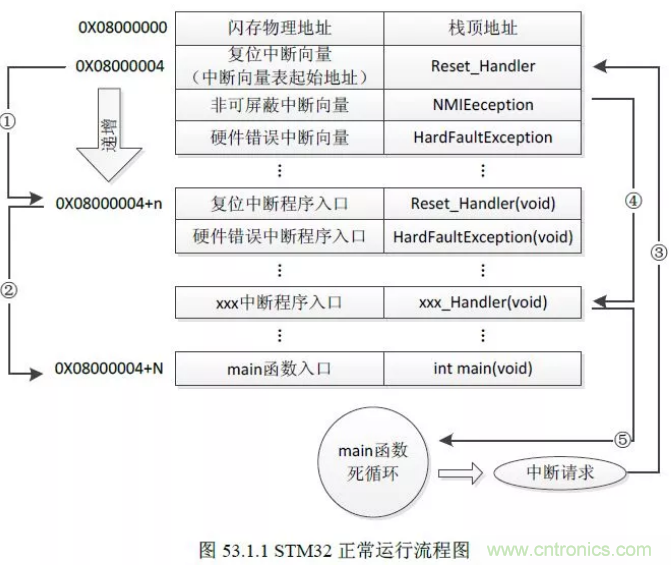
上圖表示STM32正常運(yùn)行的流程圖,可以看到上電復(fù)位后系統(tǒng)從0x80000004處開(kāi)始運(yùn)行程序,這里放置的是復(fù)位中斷向量,然后跳轉(zhuǎn)至復(fù)位中斷程序入口后再跳轉(zhuǎn)至main函數(shù)運(yùn)行用戶(hù)的程序。

上圖表示加入IAP后的STM32程序運(yùn)行流程圖。可以看到上電復(fù)位后跳到IAP程序的main函數(shù)處運(yùn)行IAP過(guò)程(這個(gè)過(guò)程就是把下面灰底色塊的程序代碼燒進(jìn)B區(qū)域à代碼更新)。
后面的過(guò)程和STM32正常運(yùn)行一樣,如果出現(xiàn)中斷請(qǐng)求,還是跳轉(zhuǎn)到A區(qū)域中的中斷向量表中,然后再跳轉(zhuǎn)到B區(qū)域的中斷服務(wù)入口。
76、USB有四根線,VCC、GND、D+、D-。在USB主機(jī)上,D+和D-均通過(guò)一個(gè)15K的電阻接地,這樣兩條線均為低電平。
在USB設(shè)備中,對(duì)于高速設(shè)備會(huì)在D+通過(guò)一個(gè)1.5K的電阻接到VCC,而低俗設(shè)備會(huì)在D-通過(guò)一個(gè)1.5K的電阻接到VCC。
這樣主機(jī)就可以通過(guò)D+和D-的高電平的到來(lái)來(lái)檢測(cè)是否有設(shè)備接入,并且識(shí)別高低速設(shè)備。
77、UCOSII是一種實(shí)時(shí)操作系統(tǒng),具有執(zhí)行效率高、占有空間小(最小內(nèi)核2KB)、實(shí)施性能優(yōu)良、擴(kuò)展性強(qiáng)和移植性強(qiáng)等優(yōu)點(diǎn)。
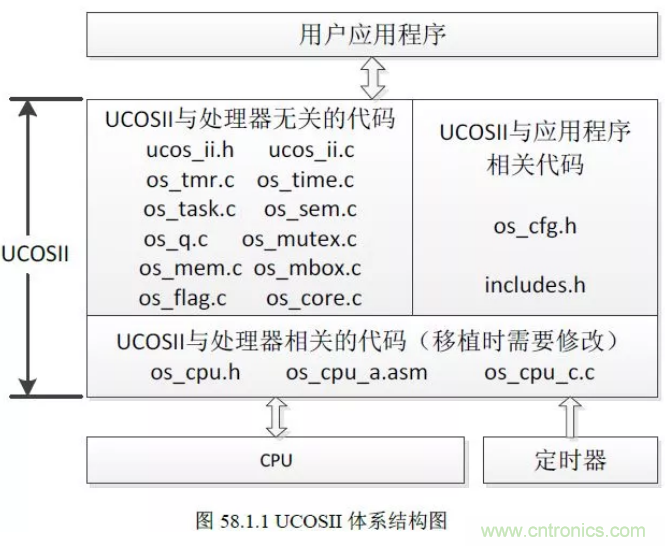
UCOS具有多任務(wù)并發(fā)工作的特點(diǎn)(注意,任何時(shí)候只有一個(gè)任務(wù)能夠占用CPU。并發(fā)只是任務(wù)輪流占用CPU而不是同時(shí)工作)。
最大支持255個(gè)任務(wù)并發(fā)工作。



