
【導讀】文章將介紹有效使用單片機外設(shè)功能的結(jié)構(gòu)及使用方法,能讓我們將能學到各種單片機共通的基本外設(shè)功能,并可廣泛應(yīng)用到各個方面。單片機僅靠CPU和內(nèi)存是無法運行的!本文介紹GPIO和串行通信。
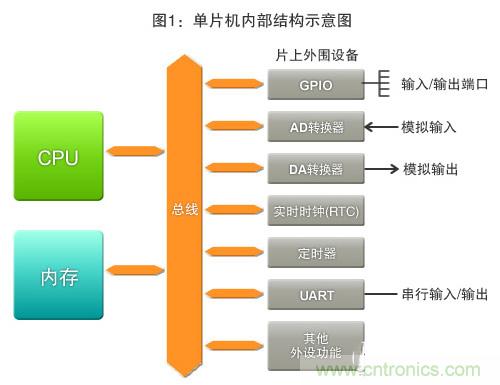
有效使用單片機不可或缺的“外設(shè)功能”是什么呢?正如過去連載的“單片機入門”系列中所介紹的那樣,對電子產(chǎn)品進行控制的單片機是由CPU、內(nèi)存及外設(shè)功能等部分組成的(圖1)。CPU根據(jù)指令(程序),執(zhí)行運算、數(shù)據(jù)的讀寫以及進行條件判斷等,而內(nèi)存則用來保存該程序(記憶)。
外設(shè)功能是指為了使單片機便于使用的各種功能。例如,CPU為了與外部的傳感器及開關(guān)等進行信號交換,就需要“輸入/輸出端口(I/O端口)”這種外設(shè)功能。
而且,將模擬輸入信號轉(zhuǎn)換為數(shù)字值的“A/D轉(zhuǎn)換器”以及反過來將數(shù)字值轉(zhuǎn)換為模擬輸出信號的“D/A轉(zhuǎn)換器”則是單片機對各種信號進行處理時不可或缺的外設(shè)功能。
另外,還有為了正確測量時間所用的“定時器”以及提供日期和時計的“實時時鐘(RTC)”,用于進行與時間相關(guān)的處理,此外還有將并行信號(parallel signal)和串行信號(serial signal)進行互相交換的“UART(Universal Asynchronous Receiver Transmitter,通用異步收發(fā)器)”等,以便進行通信。
本連載中,將以瑞薩電子單片機--RX63N為例,介紹令單片機更便于使用的外設(shè)功能的基礎(chǔ)知識。我們將使用搭載了“RX63N”程序的電子板“GR-SAKURA”進行說明,請你也實際操作試試看吧!
了解數(shù)字信號的輸入/輸出端口---“GPIO”
在“輸入/輸出端口(I/O端口)”中,數(shù)字信號的輸入/輸出端口即“GPIO(General Purpose Input/Output)”也被稱為“通用I/O端口”,是一種用于數(shù)字信號輸入/輸出的非常方便的端口。用于將數(shù)字輸出的傳感器值和開關(guān)的ON/OFF值傳送到單片機的輸入端及通過LED來顯示單片機的運算結(jié)果,以及輸出用于驅(qū)動電機運行的信號等等。
GPIO被稱為通用端口是其引腳既可以用于輸入也可以用于輸出。在早期的單片機中,引腳都被固定用于輸入或輸出,但是現(xiàn)在很多單片機中都可以自由地將其設(shè)定為輸入或輸出端口。假設(shè)GPIO端子有8個引腳,則可以將4個引腳用于輸入,另4個引腳用于輸出,也可以將1個引腳用于輸入,剩下的7個引腳用于輸出。
在GPIO中,為了使CPU和外部設(shè)備之間進行數(shù)據(jù)交換,要相互執(zhí)行通過程序處理的數(shù)字值(0或1)與信號(電壓的LOW電平或HIGH電平)的轉(zhuǎn)換。下面是作為RX63N單片機的GPIO端口基礎(chǔ)的寄存器(※1)的作用(圖2)。
(※1)寄存器(Register):存在于單片機的CPU和外設(shè)功能內(nèi)部中的記憶回路。用于運算和保持CPU的執(zhí)行狀態(tài)。由于是作為CPU及外設(shè)功能的內(nèi)部回路,所以在對內(nèi)存進行寫入和讀取時速度很快,但容量卻非常小,既有可以用于各種用途的寄存器(通用寄存器),又有用于某些限定的功能和用途的特殊寄存器。
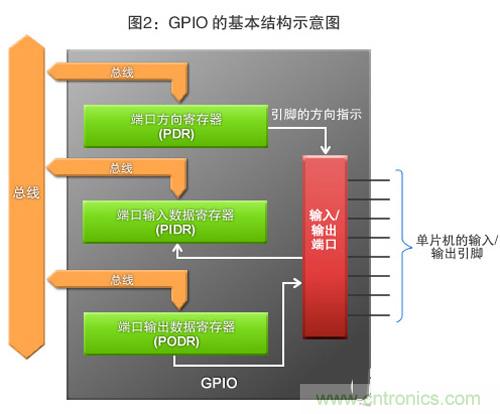
端口方向寄存器(PDR)
決定引腳方向的寄存器,也稱為“方向寄存器”。
端口輸入數(shù)據(jù)寄存器(PIDR)
輸入時反映所使用的引腳狀態(tài)的寄存器。從引腳輸入LOW電平或者HIGH電平時會將之轉(zhuǎn)換為0或1的值并讀取該轉(zhuǎn)換結(jié)果。隨著引腳的變化數(shù)值也將發(fā)生變化。所以不會保持讀取時的值。
端口輸出數(shù)據(jù)寄存器(PODR)
此寄存器保存用作輸出引腳的輸出數(shù)據(jù)。將0或1的值轉(zhuǎn)換為LOW電平或HIGH電平信號并從引腳輸出。由于可以與內(nèi)存一樣保持改寫前的值,所以在改寫前來自引腳的輸出電壓也將保持不變。
通過GR-SAKURA來體驗活用了GPIO的程序!
本期我們將通過“按下開關(guān)時LED會發(fā)光”這個程序來學習GPIO的運行。我們將利用GR-SAKURA專用的程序庫進行編程。(櫻花程序庫的“數(shù)字I/O”)
在櫻花程序庫(SAKURA Library)的“數(shù)字I/O”中,電路板上的I/O專用引腳究竟是用作輸入還是用作輸出最初由pinMode(引腳號、模式)函數(shù)來指定。一旦指定后,只要引腳的用法沒發(fā)生變化就無需執(zhí)行pinMode函數(shù)。
用作輸入時,通過digitalRead函數(shù)來指定引腳號,結(jié)果將被作為HIGH電平或LOW電平信號被返送回。用作輸出時通過digitalWrite函數(shù)來指定引腳號。值還是HIGH電平或LOW電平,HIGH電平相當于1,LOW電平相當于0,所以也可將之記述為0或1。
由于這次使用的是GR-SAKURA電路板上的開關(guān)和LED,所以即使不知道與其相連的引腳號和端口號,如為開關(guān),只需在程序中寫入“PIN_SW”,如為LED,只需在程序中寫入“PIN_LED0”?“PIN_LED3”,櫻花程序庫(SAKURA Library)就會進行處理。
圖3所示的是使用GPIO時,通過LED的閃爍來反映開關(guān)的值的程序例。首先通過pinMode函數(shù)來指定與開關(guān)相連的引腳作為輸入引腳,將與LED連接的引腳作為輸出引腳(①)。只需在開始時定義一次就夠了,之后將在setup函數(shù)中進行處理。
接下來,“只要按下開關(guān)LED就點亮,不按開關(guān)LED就熄滅”的部分在loop函數(shù)中進行處理。開關(guān)是否被按下要根據(jù)digitalRead(PIN_SW)返回的值來判斷。所以GR-SAKURA的開關(guān)在什么都不做(松開)的狀態(tài)下為HIGH電平(通過上拉電阻連接電源),被按下時為LOW電平(連接GND)。
如果digitalRead(PIN_SW)返回的值為LOW電平時=開關(guān)被按下(②)、LED將被點亮。D1的LED為digitalWrite(PIN_LED0, HIGH)時將被點亮(③)。
如果判斷為開關(guān)沒被按下時,當是digitalWrite(PIN_LED0, LOW)時(④),GPIO的輸出為LOW電平,LED熄滅。
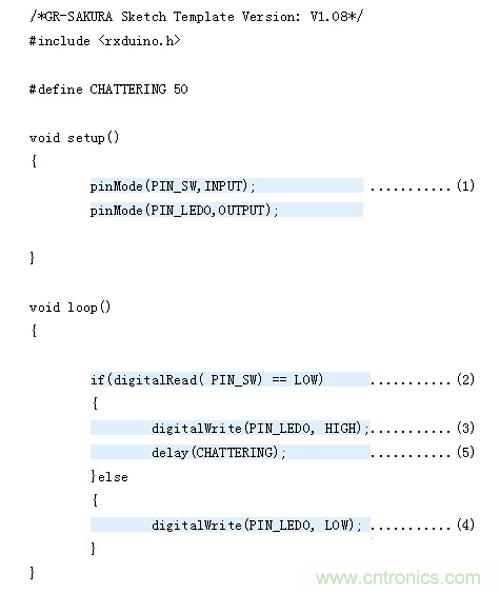
圖3:程序例
請試著使用GR-SAKURA的Web編譯器來執(zhí)行圖4所示的程序。Web編譯器的使用方法請參考嵌入系統(tǒng)入門系列的“第一次挑戰(zhàn)制作!
程序的提示 通過“振蕩”來防止誤操作
開關(guān)是用來接通(開關(guān)有時顯示為“關(guān)”)和切斷(開關(guān)有時顯示為“開”)電路的,即開和關(guān)。在開關(guān)等裝置機械地進行開和關(guān)的操作時,任何一種狀態(tài)都不可能在一瞬間完成。裝置會發(fā)生非常快速的振動,并非常精細地在開和關(guān)之間反復(fù)動作后才會轉(zhuǎn)變?yōu)樾碌臓顟B(tài)。這種現(xiàn)象被稱為“振蕩”。為了讓大家更容易理解“振蕩”的現(xiàn)象,我們制作了一個簡單易懂的體驗程序(圖4)。請大家也試著體驗一下吧。
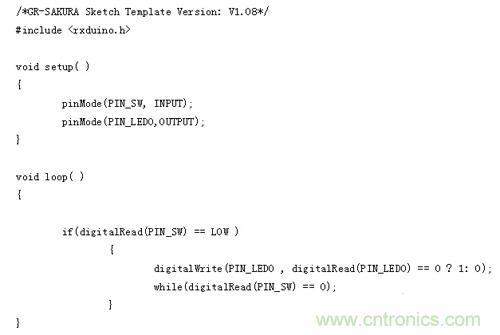
圖4:振蕩體驗程序
試著通過控制開關(guān)反復(fù)點亮、熄滅LED來執(zhí)行所期望的動作,怎么樣?是不是有時如你所愿,有時又適得其反?產(chǎn)生這種現(xiàn)象的原因就是因為振蕩。如果將振動過程中的狀態(tài)作為開關(guān)的信號讀取出來,將得不到正確的結(jié)果。因此,需用防振蕩程序來解決。
在圖3的程序中,檢測到開關(guān)最初被按下后先停止50微妙(0.05秒)后再進行處理(圖3中的⑤)。如果不停止,在檢測到開關(guān)被按下時雖然LED也會亮燈,但接下來確認開關(guān)的狀態(tài)時,由于振蕩的原因,有可能會認為是“開關(guān)處于松開的狀態(tài)”(因為輸入暫時還沒返回到HIGH)而導致LED熄滅。因此,如上所述,我們通過在開關(guān)的狀態(tài)穩(wěn)定之前停止處理(50微妙)的方式來解決這個問題。
我們一起學習了GPIO的結(jié)構(gòu)和使用方法。如果將程序中的PIN_LED0的部分換成別的LED號(僅在選0?3時有效),將可以變換閃爍的LED。另外,如果改寫判斷部分的程序,也可以進行諸如“按兩次則LED亮燈,接下來再按1次時熄滅”等復(fù)雜的處理。這次的體驗程序只使用了GR-SAKURA上的輸入/輸出設(shè)備,但也可將帶有數(shù)字輸出功能的外部傳感器連接到GR-SAKURA的I/O端子上,也可以連接LED以外的設(shè)備(如電子蜂鳴器)。
串行通信
單片機與外圍設(shè)備的連接:并行和串行
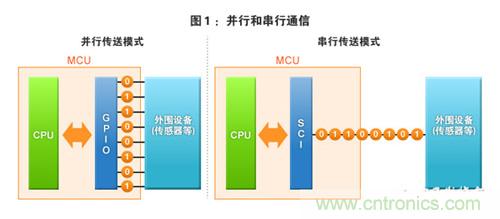
單片機是嵌入式設(shè)備的“頭腦”,其與作為嵌入式設(shè)備的“手和腳”是各種外圍設(shè)備(輸入輸出設(shè)備等)連接。單片機應(yīng)該怎樣與這些外圍設(shè)備連接才好呢?比如,我們來考慮一下將傳感器與單片機連接的情況。如果使用本連載第1期中介紹的“GPIO”的話,從傳感器向單片機傳送8位信號時需要使用8個引腳。這種傳送模式被稱為并行(并行通信)模式(圖1―左)。但是,僅一個傳感器就需要連接8個引腳,確實太可惜了,是否還有連接更少的引腳就能達到同樣目的的方法呢?
此時,可使用串行傳送模式(串行通信)。 “串行”的意思就是直列或直線。通過并行傳送模式(Parallerl Transferring Mode)中需要8個引腳才能實現(xiàn)的通信,在串行傳送模式(Serial Transfer Mode)中,由于可以以排成一直線的模式進行傳送,所以僅需一個引腳就夠了(圖1―右)。由于在單片機內(nèi)部是通過并行模式來進行信號交換,所以還需將通過串行模式傳送來的信號轉(zhuǎn)換為并行模式(串行并行轉(zhuǎn)換)。相反,從單片機向與單片機串行連接的外圍設(shè)備傳送的信號也需要將信號從并行模式轉(zhuǎn)換為串行模式(并行串行轉(zhuǎn)換)。瑞薩電子的單片機RX63N是通過被稱為SCI(Serial Communication Interface,串行通信接口)的單元進行這些轉(zhuǎn)換的。例如,使一個引腳對應(yīng)1位 的char型變量進行信息交換的是并行通信(Parallel communication),而一個引腳以時分(time division)按每1位進行信息交換的就是串行通信(Serial Communication)。
由于串行連接僅使用少數(shù)引腳便可進行,所以,近年來多被用于單片機和外圍設(shè)備之間的連接。GPIO除了用于將驅(qū)動電機的信號及LED閃爍等軟件操作結(jié)果的信號輸出時以外,還被用于通過開關(guān)或ON/OFF輸出的傳感器的輸入等。
通過UART便可簡單地使用串行通信
由于電特性的不同,以及用于進行通信協(xié)議的規(guī)定不同,串行通信具有多種方式,其中,最易于使用的應(yīng)該是“異步通信模式”了。僅需用信號線將單片機和外圍設(shè)備連接起來便可使用,所以在單片機與動作監(jiān)視器用的終端之間進行通信時、以及單片機與無線LAN用模塊進行通信時使用。
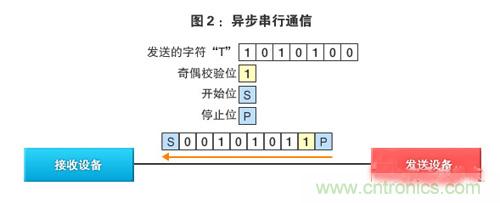
在異步通信模式的串行通信狀態(tài)下,一字節(jié)的文字信息※1在“開始位”(Start bit,意味著開始發(fā)送)和“停止位”(Stop bit,意味著停止發(fā)送)之間發(fā)送(圖2)。由此,無需I2C (Inter-Integrated Circuit,內(nèi)部集成電路)”及“SPI(Serial Peripheral Interface,串行外設(shè)接口)”等時鐘信號線(但在其他的串行通信模式中這些時鐘信號線是必需的,以對發(fā)送和接收的時序進行同步)。另外,還可追加用于檢查數(shù)據(jù)是否已正常發(fā)送的“奇偶校驗位(Parity bit)※2”。
此通信方式所使用的通信用器件被稱為UART(Universal Asynchronous Receiver/Transmitter,通用異步收發(fā)器),在瑞薩電子的單片機--RX63N中內(nèi)置了支持此功能的SCI(串行通信接口)。
(※1)異步串行通信狀態(tài)下,一般都是從“最低有效位(LSB: Least Significant Bit),即最低二進制數(shù)位”開始進行發(fā)送的。
(※2)奇偶校驗位(Parity bit):在發(fā)送時按一定量的數(shù)據(jù)(在SCI中為7位或8位)中所具有“1”(或“0”)的個數(shù)為奇數(shù)個時定為“1”,為偶數(shù)個時定為“0”的奇偶校驗位(使偶校驗(Even Parity Check)、數(shù)據(jù)及奇偶校驗位中所包括的“1”的數(shù)量成為偶數(shù)個的方法),并通過與接收側(cè)進行校驗,以檢測出數(shù)據(jù)通信中的錯誤。反之,如果“1”(或“0”)的個數(shù)為奇數(shù)時定為“0”,為偶數(shù)時定為“1”的方法被稱為奇校驗(Odd Parity Check)。
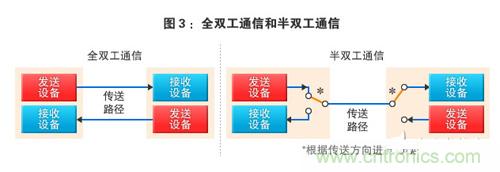
在異步通信中,能實現(xiàn)按“單片機→外圍設(shè)備”或“外圍設(shè)備→單片機”的方向確保數(shù)據(jù)信號專用的信號線時,被稱為全雙工通信。另一方面,將通過1根信號線來切換通信方向的方式稱為半雙工通信。全雙工方式時需要2根信號線,可同時進行發(fā)送和接收。半雙工方式時僅需1根信號線,但必須在發(fā)送和接收之間進行切換(圖3)。
嘗試向單片機和電腦之間進行通信!
下面,我們通過GR-SAKURA來試用樣本程序。本期我們試著通過可在電腦上運行的終端軟件和GR-SAKURA之間進行通信。也就是試用從終端軟件發(fā)送出“?”(半角問號)后就有“GR-SAKURA”的字符串被傳送回來的程序(圖4)。為了確認該程序的動作狀況,需在電腦上安裝終端軟件。如在Windows系統(tǒng)下可使用免費軟件—TeraTerm,而在Mac系統(tǒng)下建議使用該系統(tǒng)標準配備的軟件—Terminal。
該樣本程序使用了GR-SAKURA的櫻花程序庫“串行通信(Serial Class)”。該程序庫支持全雙工異步通信。
在程序的第8行中,對經(jīng)由USB的通信進行設(shè)定。第13行的Serial.read()是用于設(shè)定在串行通信中讀取從電腦發(fā)送過來的數(shù)據(jù),在讀取“?”(半角問號)時,就將“GR-SAKURA”字符串傳送回來。如果換作是GR-SAKURA中所搭載的RX63N單片機來進行處理的話,就是:SCI將電腦傳送來的串行信號轉(zhuǎn)換為并行信號,再由CPU對“?”進行識別后判斷輸出“GR-SAKURA”字符串,之后再通過SCI將并行信號轉(zhuǎn)換為串行信號后發(fā)送到電腦上。
雖然只是非常簡單的程序,但是由此便可實現(xiàn)在GR-SAKURA和電腦之間進行文字信息的交換。本期我們介紹的是固定字符串,但也可發(fā)送GR-SAKURA的處理結(jié)果。請大家也作嘗試!
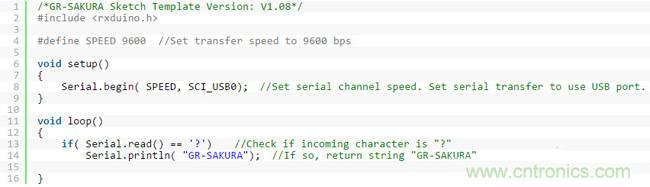
圖4:樣本程序:從Terminal輸入“?”后,將傳送回“GR-SAKURA”的信息。
※//~為注釋符,不會影響程序的運行
※本程序僅用于說明程序的原理,并不具有在實際使用時所需的對策。
