
【導讀】眾所周知,低功耗已經(jīng)是衡量一個嵌入式系統(tǒng)的重要指標。而作為嵌入式系統(tǒng)的核心,嵌入式CPU的功耗則對整個系統(tǒng)起著重要的作用。本文介紹一種利用實時時鐘降低嵌入式系統(tǒng)功耗的方法,供大家參考學習。
1.嵌入式CPU低功耗模式介紹
眾所周知,低功耗已經(jīng)是衡量一個嵌入式系統(tǒng)的重要指標。而作為嵌入式系統(tǒng)的核心,嵌入式CPU的功耗則對整個系統(tǒng)起著重要的作用。當前流行的嵌入式系統(tǒng)CPU,基本都提供低功耗特性。一般而言,當嵌入式CPU都會有工作模式與低功耗模式,而低功耗模式又可進一步分為空閑模式,休眠模式,睡眠模式等。進入低功耗模式后,CPU的功耗會降低很多。而外部中斷發(fā)生時,可以將CPU喚醒。一個嵌入式系統(tǒng)運行起來后,當系統(tǒng)進入idle狀態(tài)時,就可以讓CPU進入低功耗模式,而當外部中斷發(fā)生時,再喚醒CPU,重新回到工作模式。讓CPU盡可能多的處于低功耗模式,可以大大降低系統(tǒng)的功耗。然而,即使系統(tǒng)處于idle而且沒有別的工作要做,系統(tǒng)實時時鐘的中斷,也會不停的喚醒CPU,從而增加系統(tǒng)功耗。因此,可以考慮對系統(tǒng)實時時鐘的中斷進行修改,從而減少對系統(tǒng)功耗的影響。
2.系統(tǒng)實時時鐘與功耗的關系分析
在目前的嵌入式系統(tǒng)中,系統(tǒng)實時時鐘一般是一個硬件循環(huán)計數(shù)器。當硬件計數(shù)器計到一定數(shù)值時會向CPU發(fā)出中斷。系統(tǒng)實時時鐘是現(xiàn)代多任務嵌入式操作系統(tǒng)的重要組成部分,因此我們需要先討論一下嵌入式操作系統(tǒng)與系統(tǒng)實時時鐘的關系。當今的嵌入式操作系統(tǒng)一般都支持多任務,優(yōu)先級和時間片調度。當嵌入式OS運行起來后,一般都有一個IDLE任務,它的優(yōu)先級最低,而其他任務的優(yōu)先級都應該比它高。在優(yōu)先級調度機制中,只有當系統(tǒng)中其他高優(yōu)先級任務都處于阻塞狀態(tài)時,它才有機會運行。時間片調度機制只對同優(yōu)先級的任務有效。也就是說,不同優(yōu)先級的任務之間是不會按時間片調度輪轉的,而是按優(yōu)先級來調度的。因此當系統(tǒng)進入IDLE任務時,可以認為系統(tǒng)中沒有工作要CPU來做,系統(tǒng)為idle狀態(tài)。當時間片調度機制開啟后,嵌入式OS就會根據(jù)時間片來調度任務。
也就是當一個時間片用完后,要運行調度器來決定下一個時間片的歸屬。時間片的基本單位是系統(tǒng)tick,而系統(tǒng)tick是以系統(tǒng)實時時鐘為基礎的。當系統(tǒng)實時時鐘中斷產(chǎn)生時,CPU會將系統(tǒng)tick加1。每當系統(tǒng)tick增加n(一個時間片)時,嵌入式OS將啟用調度器進行時間片調度。因此,當時間片調度機制開啟后,就需要系統(tǒng)tick的實時更新和調度器的定時運行,也就需要實時時鐘中斷以很高的頻率定時產(chǎn)生。如果關閉時間片調度機制,則任務之間只需要按照優(yōu)先級來調度,這樣就不需要計算時間片,也就是系統(tǒng)tick不用實時更新,實時時鐘的中斷不必以很高的頻率產(chǎn)生,調度器也不用定時運行。這樣就有可能考慮延長實時時鐘的中斷間隔。同時調度器不需要進行時間片調度,可以節(jié)省系統(tǒng)開銷。但關閉時間片調度后,系統(tǒng)就只有優(yōu)先級調度。這就要求系統(tǒng)的所有任務要主動阻塞,而不要期待調度器把同優(yōu)先級的其他任務調度出CPU而讓自己運行。在目前流行的嵌入式操作系統(tǒng)中,一般都提供了很多主動阻塞的機制,因此要做到這一點并不難。延長實時時鐘的中斷間隔,可以讓CPU長期處于低功耗狀態(tài),直到有設備中斷喚醒CPU。
這樣將大大減低系統(tǒng)在空閑時的功耗。延長實時時鐘中斷間隔后,需要考慮的問題有兩個,一是系統(tǒng)tick,另一個是系統(tǒng)delay。系統(tǒng)tick是實時時鐘和操作系統(tǒng)之間的接口,操作系統(tǒng)與時間相關的模塊和API,基本都是基于tick的。在一般系統(tǒng)中,實時時鐘的中斷是每個tick一次。因此tick是操作系統(tǒng)最小的計時單位。延長實時時鐘中斷間隔后,系統(tǒng)tick就會長時間不增加,因此怎樣保證系統(tǒng)tick的準確性,就是最基本的問題。解決了tick的準確性,就可以隔離實時時鐘對操作系統(tǒng)的影響。系統(tǒng)delay是操作系統(tǒng)一種重要的阻塞機制,它主要用于讓一個任務主動讓出CPU一段時間。一般系統(tǒng)delay是基于系統(tǒng)實時時鐘的,系統(tǒng)delay的基本單位就是tick。當調用delay時,API函數(shù)會首先得到當前系統(tǒng)tick,然后加上需要delay的時間,形成一個未來的delay時間點,再將任務掛到系統(tǒng)的delay隊列上。因此delay隊列上的所有任務都對應一個自己的delay時間點。當系統(tǒng)tick超過某個任務的delay時間點時,該任務就應該醒來。這就需要實時時鐘的中斷來喚醒CPU,并運行調度器讓delay的任務重新進入就緒隊列。如果實時時鐘中斷間隔延長,系統(tǒng)tick就會很長時間不增加,就很難保證delay的準確性。同時delay時間到達后,也無法喚醒任務。要保證系統(tǒng)tick的準確性,就要求每次主動獲得系統(tǒng)tick時,需要通過實時時鐘硬件計數(shù)器的值計算出當前的系統(tǒng)tick。同時,需要保證主動獲取和實時時鐘中斷之間的同步。而對于系統(tǒng)delay,則需要修改硬件計數(shù)器的計數(shù)值,使其為系統(tǒng)delay隊列上的最小delay時間點的delay時間。這樣可以利用硬件計數(shù)器來準確控制delay的準確性,并且利用中斷來及時調度任務。
3.在I.MX51上的解決方案:
ECOS是一款優(yōu)秀的輕量級嵌入式操作系統(tǒng),它的內(nèi)核微小,緊湊,支持多任務,優(yōu)先級和時間片調度機制。飛思卡爾的多媒體芯片i.mx51基于ARM Cortex-A8核,具有很高的性能,同時支持了ARM提供的低功耗功能。ARM提供低功耗模式,即睡眠模式。ARM執(zhí)行指令WFI后,會進入睡眠狀態(tài)。在睡眠模式下,ARM的時鐘被關閉,ARM只消耗極低的功耗來維護自身的狀態(tài),即啟用SRPG(State retaining power gate)。當有中斷發(fā)生時,ARM會被喚醒,恢復時鐘,重新開始執(zhí)行。MX51提供了多個硬件計數(shù)器,本文采用其中的GPT作為實時時鐘。GPT是一個循環(huán)計數(shù)器,可以設置最大為0xffffffff的計數(shù)值,每個時鐘計數(shù)值減1,當計數(shù)值減到0時觸發(fā)中斷,時鐘為32KHz。GPT的計數(shù)值可以在任意時刻被ARM讀取,讀取是不影響計數(shù)的。當IDLE任務運行時,IDLE就執(zhí)行WFI指令,讓ARM進入低功耗模式。如果有設備產(chǎn)生中斷,ARM就會被喚醒,處理中斷以及所需的任務調度,任務運行?;谇懊娴姆治?,本文對ECOS的時間片調度和實時時鐘系統(tǒng)進行了修改。對于時間片調度機制,在ECOS的配置文件中將其關閉。
對于實時時鐘,則延長了它的中斷間隔。系統(tǒng)tick在兩種情況下會被更新,一種是當調用ECOS API去讀系統(tǒng)tick的時候,另一種就是GPT產(chǎn)生中斷。當ECOS啟動后,將GPT的計數(shù)值設為最大,這樣GPT就需要很長時間才會產(chǎn)生一次中斷。在這期間,系統(tǒng)tick只會在ECOS API主動讀取時才會更新。系統(tǒng)tick的更新是通過讀取硬件計數(shù)器的計數(shù)值計算出來的。在ECOS系統(tǒng)的實時時鐘類中增加一個變量pre_hardware_count用于記錄上一次讀取的硬件計數(shù)器的值。當每次系統(tǒng)API讀取tick時,當前硬件計數(shù)器的值與上一次讀取時硬件計數(shù)器的值的差值就是兩次讀取之間已經(jīng)過去的tick數(shù)。當實時時鐘產(chǎn)生中斷時,即硬件計數(shù)器計到0,將此變量清零。
這樣,就可以保證每次讀取系統(tǒng)tick 時,能得到一個準確的系統(tǒng)tick值。當有任務要主動延時一段時間,即調用系統(tǒng)delay API時。ECOS的API函數(shù)會計算出該任務的delay時間點,然后將該任務掛入系統(tǒng)delay隊列。然后遍歷系統(tǒng)delay隊列,找出隊列中的最小delay時間點,把該delay時間點對應的delay時間寫入GPT,讓GPT來控制delay時間。delay時間到后,GPT會產(chǎn)生中斷,ECOS將中斷處理程序分為兩部分,ISR和DSR。在ISR中將硬件計數(shù)器設為最大值。然后在DSR中增加系統(tǒng)tick,將超時的任務重新掛入就緒隊列,并且再次找出系統(tǒng)delay隊列上的最小delay時間點,寫入硬件計數(shù)器。如果系統(tǒng)delay隊列為空,則不對硬件計數(shù)器再進行操作,保持ISR 中寫入的最大值。最后ECOS會運行調度器,如果超時的任務具有最高優(yōu)先級,那么它就會得到運行,也就是醒過來。這樣也就可以保證系統(tǒng)delay的準確性與及時性。下圖是修改后實時時鐘后系統(tǒng)tick, delay以及調度器相關的流程圖。
下圖是修改后實時時鐘后系統(tǒng)tick, delay以及調度器相關的流程圖。
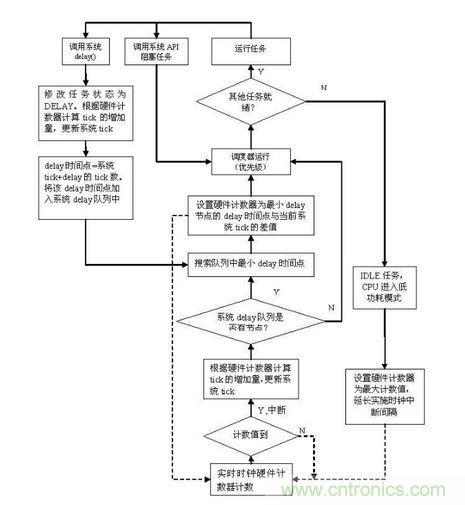
圖1. 實時時鐘修改流程圖
下面是在飛思卡爾公司i.mx51上的實驗數(shù)據(jù)。
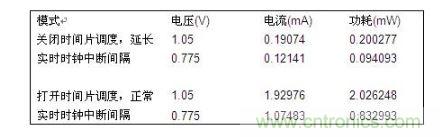
可以看出,修改了時間片調度和實時時鐘后,不論ARM工作在哪個電壓點,系統(tǒng)IDLE時的功耗降低了差不多10倍。因此,延長實時時鐘中斷間隔能極大的降低系統(tǒng)功耗。
4.其他系統(tǒng)的類似方法
當前流行的嵌入式操作系統(tǒng)Linux和WinCE也都在討論修改系統(tǒng)實時時鐘中斷方式以求降低系統(tǒng)功耗。對于Linux系統(tǒng),有一個Less Watts項目,實現(xiàn)tickless idle,即無tick的idle,其實就是修改實時時鐘的中斷方式。WinCE則提供了可變系統(tǒng)時鐘節(jié)拍Variable Tick Scheduler,在進入idle狀態(tài)前改變系統(tǒng)時鐘節(jié)拍,這樣在預期的時間段里,idle狀態(tài)不會被無謂的系統(tǒng)時鐘中斷喚醒。
5.結論
可以看出,通過修改實時時鐘中斷方式,可以使CPU在idle狀態(tài)下長時間處于低功耗模式,極大的降低系統(tǒng)功耗。而且當前流行的嵌入式操作系統(tǒng)都在積極的探討此方法。相信今后這項功能會成為嵌入式操作系統(tǒng)必備的一個功能。

