

【導(dǎo)讀】本文檔概述了一種基于 SCI/UART 輸入信號(hào),可以自動(dòng)校準(zhǔn)本設(shè)備SCI/UART波特率的方法,該方法適用與所有第三代C2000芯片,比如F2807x/37x,F(xiàn)28004x,F(xiàn)28002x等等。
一 原理說(shuō)明
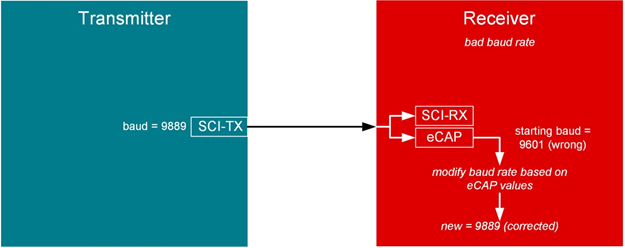
假設(shè)有2塊電路板通過(guò)SCI進(jìn)行通信。“Transmitter”向“Receiver”發(fā)送未知波特率的數(shù)據(jù),“ Receiver”則使用 eCAP 測(cè)量未知的波特率,然后修改其自身的波特率和“Transmitter”匹配。
下面款圖是一種情況,其中“Transmitter” 的波特率設(shè)置為 9889,而“Receiver”的初始波特率設(shè)置為 9601 ,相比之下“Receiver”的波特率為 -3% 偏差。 經(jīng)過(guò)算法的自動(dòng)校準(zhǔn)以后,“Receiver”將會(huì)把自身波特率校正為與“Transmitter”相同的9889。
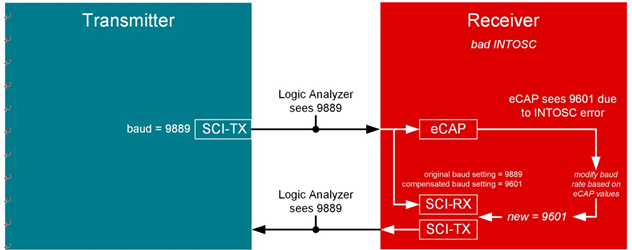
下面框圖則是另一種情況,假如“Receiver”和“Transmitter”的初始波特率都是9889,但“Receiver”的內(nèi)部晶振INTOSC有-3%的偏差。使用上述完全相同的方法原理和步驟,“Receiver”波特率設(shè)置將會(huì)從9889校準(zhǔn)成9601,這樣“Receiver”的波特率設(shè)置被自動(dòng)校準(zhǔn)抵消內(nèi)部晶振的偏差。在測(cè)量實(shí)際信號(hào)時(shí),“Receiver”輸出到“Transmitter”的信號(hào)會(huì)是正確的 9889 波特率。
二 Receiver 的校準(zhǔn)代碼
1. 初始化
需要配置以下模塊來(lái)校準(zhǔn)波特率:
● 時(shí)鐘:使用 INTOSC2 并選擇 100MHz 的 LSPCLK
#define DEVICE_SETCLOCK_CFG (SYSCTL_OSCSRC_OSC2 | SYSCTL_IMULT(20) |
SYSCTL_FMULT_NONE | SYSCTL_SYSDIV(2) |
SYSCTL_PLL_ENABLE)
//
// Set up PLL control and clock dividers
//
SysCtl_setClock(DEVICE_SETCLOCK_CFG);
//
// Make sure the LSPCLK divider is set to the default (divide by 4)
//
SysCtl_setLowSpeedClock(SYSCTL_LSPCLK_PRESCALE_1);
● SCI 模塊:通訊數(shù)據(jù)使用,發(fā)出校準(zhǔn)以后的波形
// Initialize SCIA and its FIFO.
//
SCI_performSoftwareReset(SCIA_BASE);
//
// Configure SCIA for communications.
//
SCI_setConfig(SCIA_BASE, DEVICE_LSPCLK_FREQ, TARGETBAUD, (SCI_CONFIG_WLEN_8 |
SCI_CONFIG_STOP_ONE |
SCI_CONFIG_PAR_NONE));
SCI_resetChannels(SCIA_BASE);
SCI_resetRxFIFO(SCIA_BASE);
SCI_resetTxFIFO(SCIA_BASE);
SCI_clearInterruptStatus(SCIA_BASE, SCI_INT_TXFF | SCI_INT_RXFF);
SCI_enableFIFO(SCIA_BASE);
SCI_enableModule(SCIA_BASE);
SCI_performSoftwareReset(SCIA_BASE);
● Xbar 輸入:將 GPIO28/SCI 內(nèi)部連接到 INPUTXBAR7 與 ECAP1 配合使用
//
// Configure GPIO 28 as eCAP input
//
XBAR_setInputPin(XBAR_INPUT7, 28);
● ECAP 模塊:監(jiān)控接收到的 SCI 通信脈沖寬度
//
// Disable ,clear all capture flags and interrupts
//
ECAP_disableInterrupt(ECAP1_BASE,
(ECAP_ISR_SOURCE_CAPTURE_EVENT_1 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_2 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_3 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_4 |
ECAP_ISR_SOURCE_COUNTER_OVERFLOW |
ECAP_ISR_SOURCE_COUNTER_PERIOD |
ECAP_ISR_SOURCE_COUNTER_COMPARE));
ECAP_clearInterrupt(ECAP1_BASE,
(ECAP_ISR_SOURCE_CAPTURE_EVENT_1 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_2 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_3 |
ECAP_ISR_SOURCE_CAPTURE_EVENT_4 |
ECAP_ISR_SOURCE_COUNTER_OVERFLOW |
ECAP_ISR_SOURCE_COUNTER_PERIOD |
ECAP_ISR_SOURCE_COUNTER_COMPARE));
//
// Disable CAP1-CAP4 register loads
//
ECAP_disableTimeStampCapture(ECAP1_BASE);
//
// Configure eCAP
// Enable capture mode.
// One shot mode, stop capture at event 4.
// Set polarity of the events to rising, falling, rising, falling edge.
// Set capture in time difference mode.
// Select input from XBAR7.
// Enable eCAP module.
// Enable interrupt.
//
ECAP_stopCounter(ECAP1_BASE);
ECAP_enableCaptureMode(ECAP1_BASE);
ECAP_setCaptureMode(ECAP1_BASE, ECAP_ONE_SHOT_CAPTURE_MODE, ECAP_EVENT_4);
ECAP_setEventPolarity(ECAP1_BASE, ECAP_EVENT_1, ECAP_EVNT_FALLING_EDGE);
ECAP_setEventPolarity(ECAP1_BASE, ECAP_EVENT_2, ECAP_EVNT_RISING_EDGE);
ECAP_setEventPolarity(ECAP1_BASE, ECAP_EVENT_3, ECAP_EVNT_FALLING_EDGE);
ECAP_setEventPolarity(ECAP1_BASE, ECAP_EVENT_4, ECAP_EVNT_RISING_EDGE);
ECAP_enableCounterResetOnEvent(ECAP1_BASE, ECAP_EVENT_1);
ECAP_enableCounterResetOnEvent(ECAP1_BASE, ECAP_EVENT_2);
ECAP_enableCounterResetOnEvent(ECAP1_BASE, ECAP_EVENT_3);
ECAP_enableCounterResetOnEvent(ECAP1_BASE, ECAP_EVENT_4);
ECAP_selectECAPInput(ECAP1_BASE, ECAP_INPUT_INPUTXBAR7);
ECAP_enableLoadCounter(ECAP1_BASE);
ECAP_setSyncOutMode(ECAP1_BASE, ECAP_SYNC_OUT_DISABLED);
ECAP_startCounter(ECAP1_BASE);
ECAP_enableTimeStampCapture(ECAP1_BASE);
ECAP_reArm(ECAP1_BASE);
ECAP_enableInterrupt(ECAP1_BASE, ECAP_ISR_SOURCE_CAPTURE_EVENT_4);
2. 中斷
捕獲傳入 SCI 通信的脈沖寬度,每捕獲 4 次就中斷一次。 將這 4 個(gè)捕獲添加到陣列中。
__interrupt void ecap1ISR(void)
{
if(stopCaptures==0)
{
//
// Get the capture counts, interrupt every 4. Can be 1-bit or more wide.
// add one to account for partial eCAP counts at higher baud rates
// (e.g. count = 40, but if had higher resolution, this would be 40.5)
//
capCountArr[0] = 1+ECAP_getEventTimeStamp(ECAP1_BASE, ECAP_EVENT_1);
capCountArr[1] = 1+ECAP_getEventTimeStamp(ECAP1_BASE, ECAP_EVENT_2);
capCountArr[2] = 1+ECAP_getEventTimeStamp(ECAP1_BASE, ECAP_EVENT_3);
capCountArr[3] = 1+ECAP_getEventTimeStamp(ECAP1_BASE, ECAP_EVENT_4);
//
// Add samples to a buffer. Get average baud and tune INTOSC if buffer filled.
//
capCountIter = 0;
for (capCountIter=0; capCountIter<4; capCountIter++)
{
//
// if we still have samples left to capture, add it to the samples array
//
if(samplesArrIter<NUMSAMPLES)
{
samplesArr[samplesArrIter] = capCountArr[capCountIter];
samplesArrIter++;
}
//
// else, all samples were received, break to begin tuning
//
else
{
stopCaptures=1;
break;
}
}
}
//
// Clear interrupt flags for more interrupts.
//
ECAP_clearInterrupt(ECAP1_BASE,ECAP_ISR_SOURCE_CAPTURE_EVENT_4);
ECAP_clearGlobalInterrupt(ECAP1_BASE);
//
// Start eCAP
//
ECAP_reArm(ECAP1_BASE);
//
// Acknowledge the group interrupt for more interrupts.
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP4);
}
3. 主循環(huán)
捕獲陣列滿后,計(jì)算陣列的平均脈沖寬度 (也就是波特率),并更新SCI波特率寄存器,使其盡可能接近計(jì)算的平均值。
//
// Loop forever. Suspend or place breakpoints to observe the buffers.
//
for(;;)
{
//
// Array is filled, begin tuning
//
if(stopCaptures==1)
{
//
// Get an average baud rate from the array of samples
//
uint32_t avgBaud = getAverageBaud(samplesArr,NUMSAMPLES,TARGETBAUD);
//
// if the baud function returns the error code ''''''''0'''''''', then flag an error
//
if(avgBaud==0)
{
ESTOP0;
}
//
// Update the device''''''''s baud rate to match the measured baud rate
//
SCI_setBaud(SCIA_BASE, DEVICE_LSPCLK_FREQ, avgBaud);
//
// (OPTIONAL) Continuously send data to SCITX once tuning
// is complete for external observation (by logic analyzer or scope)
//
//unsigned char *msg;
//while(1)
//{
// msg = "aaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaa?";
// SCI_writeCharArray(SCIA_BASE, (uint16_t*)msg, 91);
//}
//
// Wait for user to view the results in "Expressions" window
//
ESTOP0;
//
// If continuing, reset the array iterator and unlock the ISR for new captures
//
samplesArrIter=0;
stopCaptures=0;
}
}
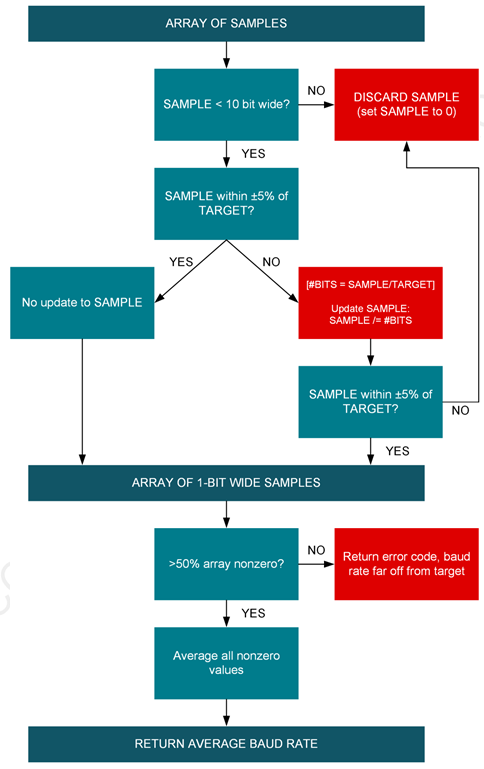
4. 平均脈沖寬度
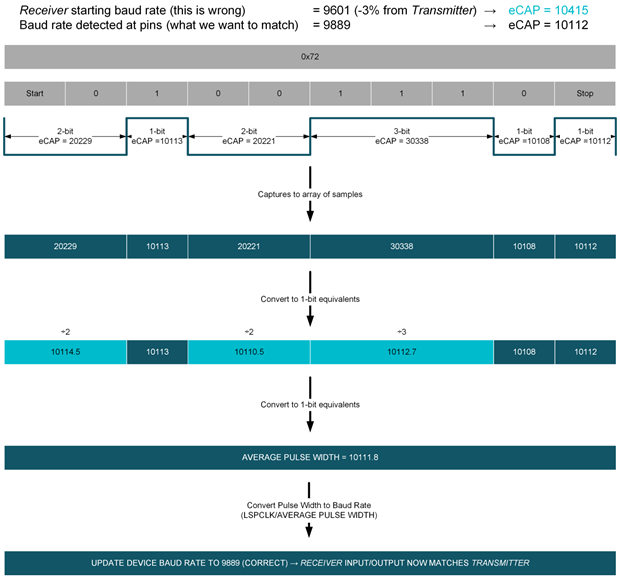
對(duì)于許多應(yīng)用的SCI 通信,傳輸?shù)臄?shù)據(jù) (例如 0xA5)是變化不固定的,因此SCI的高低電平脈沖寬度就是變化的。所以必須對(duì)樣本陣列進(jìn)行如下的預(yù)處理,然后才能計(jì)算平均脈沖寬度。
a) 丟棄大于 10 位寬的脈沖寬度 (丟棄空閑時(shí)間)
b) 將 n 位值除以 n
c) 對(duì)修改后的樣本數(shù)組進(jìn)行平均化
uint32_t getAverageBaud(volatile float arr[], int size, float targetBaudRate)
{
//
// clean up variable width array to single-bit-width array
//
uint16_t pass = arrTo1PulseWidth(arr, size, (float)DEVICE_SYSCLK_FREQ/targetBaudRate);
//
// pass only if enough good samples provided
//
if(pass == 0)
{
return 0;
}
//
// convert 2-bit width, 3-bit width, etc. to 1-bit width values by dividing, and average these values.
// skip unrelated values
//
float averageBitWidth = computeAvgWidth(arr, size);
//
// get the rounded baud rate from the average number of clocks and the sysclk frequency
//
return (uint32_t)(((float)DEVICE_SYSCLK_FREQ/(float)averageBitWidth)+0.5);
}
以下是平均脈寬計(jì)算的原理和代碼流程圖
三 結(jié)果
按照以下設(shè)置進(jìn)行測(cè)試,結(jié)果詳見(jiàn)表格,校準(zhǔn)以后的誤差從3% 改善為0.1%左右甚至更小。
1. “Transmitter”設(shè)置為正確的波特率 (我們嘗試匹配的波特率)
2. “Receiver”設(shè)置為錯(cuò)誤波特率 (-3% 或 +3%)
3. “Receiver”運(yùn)行校準(zhǔn)程序以匹配“Transmitter”

免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問(wèn)題,請(qǐng)聯(lián)系小編進(jìn)行處理。
推薦閱讀:



