
【導(dǎo)讀】在本文第一部分,我們已說明了由漏電感帶來的開關(guān)效應(yīng):有效占空比的減少,帶來在主電源開關(guān)關(guān)斷后次級二極管導(dǎo)通時間的延長和次級端電流的延遲。因此,輸出電壓低于原來的公式預(yù)測,在RCD鉗位網(wǎng)絡(luò)中的功率耗散增加。鑒于漏電感對工作波形的影響,研究其對反激式轉(zhuǎn)換器小信號響應(yīng)的影響是有趣的。但在我們進行小信號分析前,需要一個好的平均模型。
負(fù)載階躍響應(yīng)
第一部分介紹的逐周期模型如圖1所示,現(xiàn)在包括一個可變負(fù)載。在這仿真中,負(fù)載范圍將從8至6 不等,跨度為10 μs,同時記錄輸出。轉(zhuǎn)換器運行在開環(huán)配置,我們會將漏電感從1 μH增加至50 μH,而其它工作參數(shù)保持不變(占空比40%)。
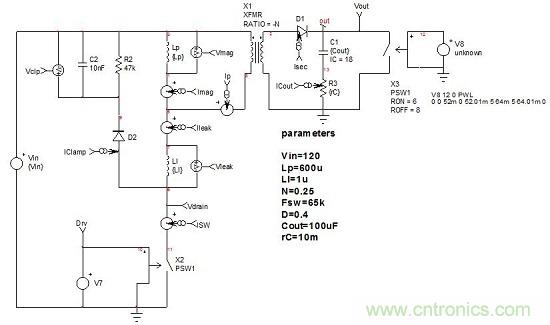
圖1:這開環(huán)簡化的反激式轉(zhuǎn)換器將讓我們探索由漏電感帶來的影響
我們已采集圖2中不同漏電感的輸出電壓。垂直刻度是每等分620 mV,對每一波形都相同,但偏移量有所改變以讓所有曲線進入圖中。第一個注釋涉及到振鈴。在幾乎沒有漏電感(1 μH)時,響應(yīng)振鈴和阻尼很輕。但負(fù)載電流的步幅不影響輸出電壓。隨著漏電感增加,振鈴開始減弱,振蕩迅速停止,這時lleak = 50 μH。然而,漏電感越大,輸出電壓越低(從近20 V至17.6 V),靜態(tài)電壓下降幅度越大:近0 V時無漏電感,達400 mV時漏電感最大。從這快速仿真中,我們可觀察到漏電感減弱瞬態(tài)響應(yīng),影響穩(wěn)態(tài)輸出電壓(如第一部分所預(yù)測),也會降低輸出阻抗。為探索漏電感對頻率響應(yīng)的影響,我們需要一個大信號模型然后線性化以給出轉(zhuǎn)換器的小信號表達式。從這小信號模型中,我們應(yīng)該能分析表達受漏電感影響的反激式轉(zhuǎn)換器的控制-輸出傳遞函數(shù)。
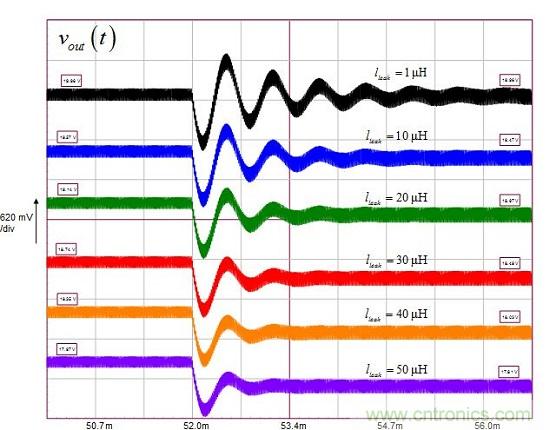
圖2:不同的漏電感影響開環(huán)反激式轉(zhuǎn)換器的幾個參數(shù)
大信號模型
脈寬調(diào)制(PWM)開關(guān)本身就能很好地模擬一個反激式轉(zhuǎn)換器。由Dr. Vatché Vorpérian于90年代提出,最簡單的模擬一個工作于CCM模式的雙開關(guān)電壓模式DC-DC轉(zhuǎn)換器的大信號響應(yīng)和固定開關(guān)頻率如圖3 。該原理包括平均兩個連接端之間的波形,“a”(有源)、“p”(無源)和“c”(共有的)以描述 一組連續(xù)時間的電流/電壓等式。Vorpérian表明,配置如圖3的電流和電壓源相當(dāng)于考慮將理想的直流變壓器連接到終端 a-c-p,受匝數(shù)比d、占空比影響。
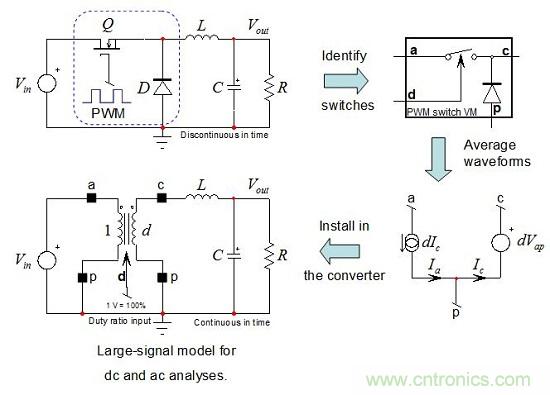
圖3:不可能有比PWM開關(guān)模型更簡單的了!
模型是不變的,說明它可替代其它DC-DC轉(zhuǎn)換器,所有描述這PWM開關(guān)的等式保持不變。圖3所示的模型是大信號版本。如果SPICE可提供這模型的小信號響應(yīng)–因為SPICE是線性求解器,它將在運行仿真前將模型線性化–我們不能使用它的原型來確立控制-輸出傳遞函數(shù)。我們需要PWM開關(guān)的線性化或小信號版本。如圖4所示,您可看到通用架構(gòu),并看它如何轉(zhuǎn)化為工作中的SPICE模型。對那些對PWM開關(guān)的進一步詳細(xì)信息感興趣的,有詳盡介紹及大量工作實例。
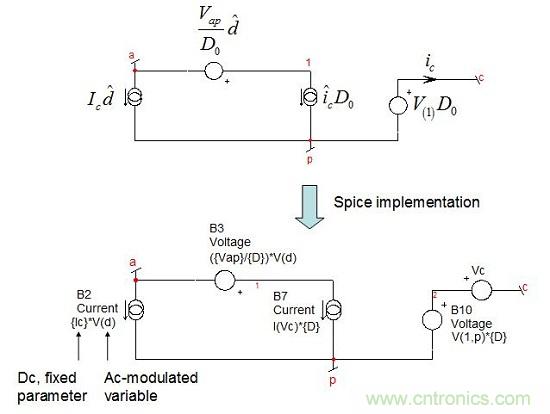
圖4:PWM開關(guān)的小信號版本使原型稍微復(fù)雜
請注意源包括幾個與產(chǎn)品的直流和交流值相關(guān)的術(shù)語。例如,系列源B3表示為{Vap}除以{D},乘以V(d)。{Vap}代表端子“a”和“p”之間的穩(wěn)態(tài)電壓,而{D}是穩(wěn)態(tài)占空比。這些都是固定參數(shù),對應(yīng)于一個工作點。例如,圖3中降壓轉(zhuǎn)換器的{Vap}是Vin. d,占空比可以是在0和1 V(0至100%)之間的任意值。
圖5顯示了如何使用PWM開關(guān)模型仿真反激式轉(zhuǎn)換器,它與特定變壓器的等效比為1:d??蚣茈妷菏怯煞抡嫫饔嬎愠龅钠命c。驗證它們在適當(dāng)?shù)南薅葍?nèi)很重要。有時結(jié)算器未能確定正確的操作點而是提供一個動態(tài)響應(yīng)。這顯然是個錯誤的結(jié)果,必須丟棄它,直到找到一個新的正確的操作點。從第一部分,我們知道CCM反激式轉(zhuǎn)換器理想的(無漏電感)直流傳遞函數(shù)是
 (1)
(1)這是原理圖顯示的整個負(fù)載電阻:我們的偏置點是正確的?,F(xiàn)在我們有了大信號模型,我們可在圖4 的基礎(chǔ)上推出小信號應(yīng)用。為此,我們需要計算幾個固定參數(shù),Vap和端子“c”的平均電流Ic。一旦您將PWM開關(guān)模型調(diào)整到適合反激式轉(zhuǎn)換器結(jié)構(gòu),在端子“a”和“p”之間的電壓Vap變?yōu)檩斎腚妷篤in減去反射電壓Vout/N(忽略次級二極管Vf)。由于這電壓是負(fù)數(shù),我們有
 (2)
(2)端子“c”的電流是流過初級電感Lp的平均電流。導(dǎo)通或dTsw期間這電流的一部分在端子“a”循環(huán),關(guān)斷或 (1–d)Tsw期間流過端子“p”。圖7顯示端子“a”和“c”的典型的瞬時波形。根據(jù)圖5中的應(yīng)用原理圖,端子“a”的平均電流也在輸入源循環(huán)以產(chǎn)生Pin:
 (3)
(3)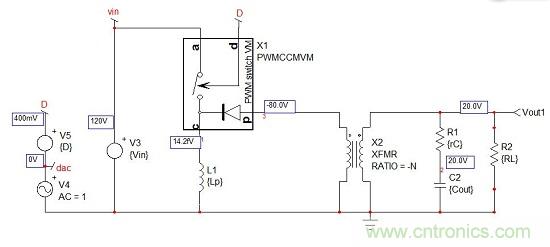
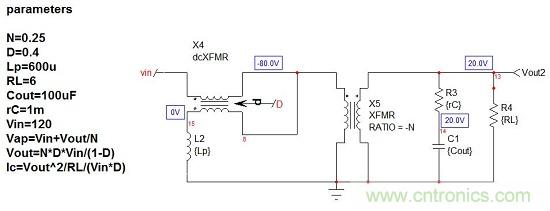
圖5:PWM開關(guān)模型用于CCM反激式轉(zhuǎn)換器的一個實際應(yīng)用
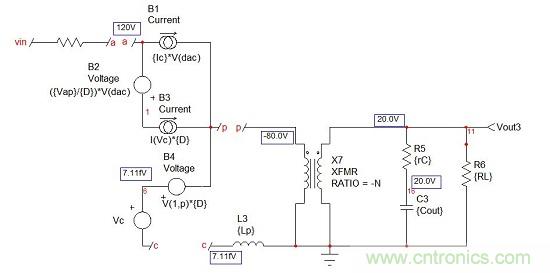
圖6:PWM開關(guān)模型的小信號版本僅需幾個控制源。
由圖7,我們可寫
 (4)
(4)將(4)代入(3),并考慮100%的能效(Pin= Pout),我們有
 (5)
(5)因此
 (6)
(6)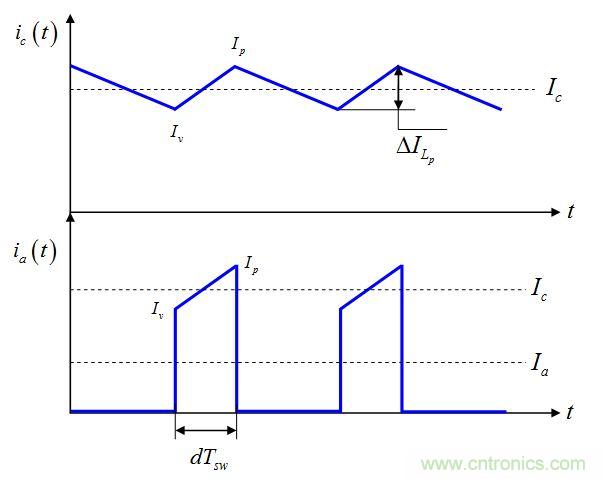
圖7:端子“c”的電流是初級電感Lp電流。
此表達式按圖5中的參數(shù)窗口計算出一個參數(shù)并傳遞給受控源(花括號之間的值)。我們現(xiàn)在可仿真并采集一個共用圖中的所有曲線。我們在圖8中繪制出來,所有曲線(幅值和相位)完全重合。這是一個CCM反激式轉(zhuǎn)換器從占空比輸入到輸出的典型響應(yīng)。諧振頻率有個峰值,然后等效串聯(lián)電阻(ESR)rc 降至零,接下來是右半平面(RHP)相位從0開始進一步下降。
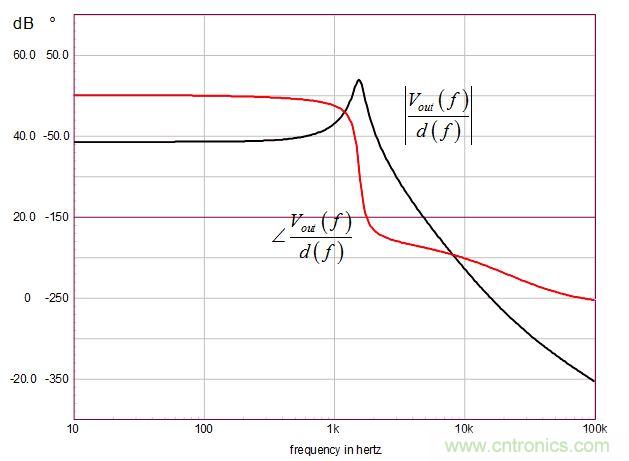
圖8:從3個不同模型(包括大信號模型、基于變壓器的電路和線性化版本)得到的頻率響應(yīng)完全重合。
考慮漏電感
在圖5中給出的平均模型,對模型施加的電壓是Vin。這電壓在dTsw期間偏置初級電感Lp。事實上,按第一部分,考慮漏電感,電壓分于漏電感和初級電感之間,形成分壓器Div:
 (7)
(7)該模型的第一次升級是由Vin*Div替代Vin。第二次改變涉及占空比d。我們在第一部分已看到,占空比受漏電感磁化時間d1Tsw影響。平均模型的有效占空比需要反應(yīng)這一事實,得出
 (8)
(8)d1取決于漏電感值(忽略次級端二極管壓降Vf)和谷底電流Iv
 (9)
(9)為計算谷底電流,我們可回頭看看圖7,可看到谷底電流實際上是平均電流Ic減去初級電感紋波的一半:
 (10)
(10)紋波電流是在ton或dTsw期間在串聯(lián)的Lp和lleak施加Vin帶來的偏移。因而谷底電流為
 (11)
(11)峰值電流以類似方法得出,只不過這方法是Ic加上而不是減去電感紋波的一半
 (12)
(12)在鉗位網(wǎng)絡(luò)循環(huán)的電流持續(xù)d2Tsw,漏電感復(fù)位時間。這時間當(dāng)然取決于lleak,但還有反射電壓Vout和鉗位電壓Vclp的因素。從第一部分我們已確定對應(yīng)的占空比為
 (13)
(13)圖9代表了導(dǎo)通期間產(chǎn)生影響的各種電流。低邊是電源開關(guān)電流,其上是漏電感電流。當(dāng)開關(guān)關(guān)斷,我們已看到電流幾乎立即(忽略Clump充電時間)流入鉗位網(wǎng)絡(luò)并迅速降至0。此時,漏電感復(fù)位,次級電流達到峰值。
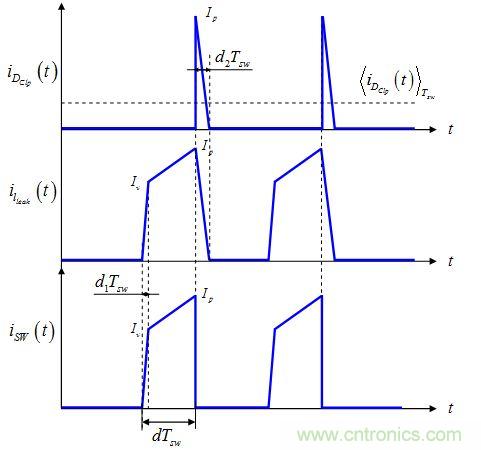
圖9:在漏電感復(fù)位時間d2Tsw期間,電流在RCD網(wǎng)絡(luò)循環(huán)。
因此在鉗位二極管中循環(huán)的平均電流只是沿開關(guān)周期的小三角表面的平均值:
 (14)
(14)因為Ip由(12)計算,我們可在(14)建模的電流源連接一個RC網(wǎng)絡(luò),將得到一個平均鉗位電壓。在SPICE中,這電壓將用于確定如(13)描述的d2。這等式中的峰值電流取決于負(fù)載電阻的輸出電壓。這電壓取決于如第一部分所見的d1。當(dāng)您運行仿真,SPICE最終解出6-未知的/6-方程的系統(tǒng),有時可能無法確定正確答案。為使它覆蓋到正確的結(jié)果,.NODESET報告告知使用什么“種子(seed)”將有效地引導(dǎo)至正確的偏置點。這種子是我們建議在它運行前進行SPICE的鉗位電壓。最終的大信號模型出現(xiàn)在圖10中。附加的指令行是.NODESET V(clp) = 300 V。
現(xiàn)在的工作包括比較從逐周期模型到更新的平均模型的負(fù)載階躍響應(yīng)。選定幾個漏電感值,1 μH, 10 μH 和30 μH。由圖11、圖12和圖13證實,在逐周期模型和平均模型之間的一致性極佳。這些圖的左邊顯示大尺度響應(yīng),而右邊顯示放大版,證實平均模型與開關(guān)模型的曲線有多吻合。小的差異出現(xiàn)在鉗位電壓,特別在直流電平。此參數(shù)預(yù)測中的任何擴散導(dǎo)致了最終大的差異。圖14比較了在兩個模型中鉗位二極管陰極觀察到的電壓。兩條曲線吻合得很好,雖然小的偏差在這案例中產(chǎn)生了2.5%的誤差。這誤差隨lleak增加而加大,但對于大的lleak值,誤差保持在10%以內(nèi)。
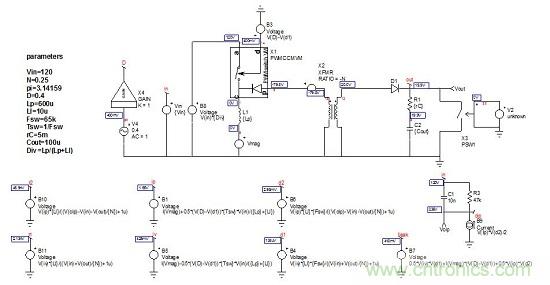
圖10:更新的大信號模型現(xiàn)在包括漏電感的影響
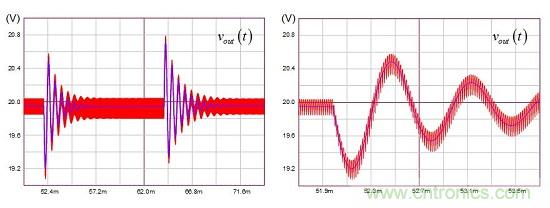
圖11:漏電感為1-μH時的瞬態(tài)響應(yīng)
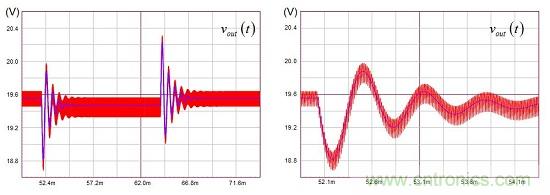
圖12:漏電感為10-μH時的瞬態(tài)響應(yīng)
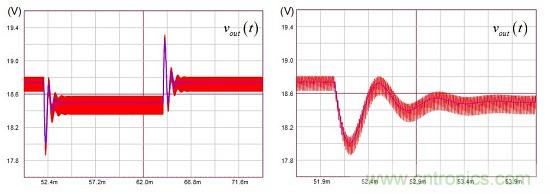
圖13:漏電感為30-μH時的瞬態(tài)響應(yīng)
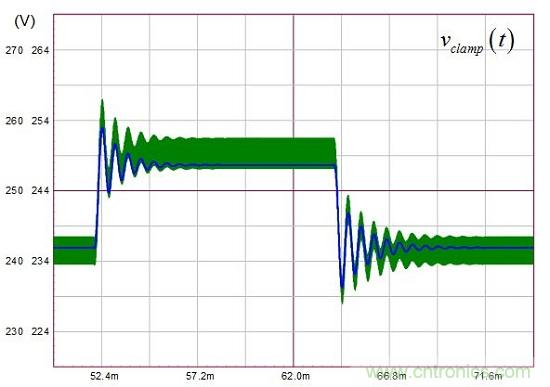
圖14:平均模型的鉗位電壓(在鉗位二極管的陰極上)與逐周期模型非常吻合(lleak= 1 μH)。
這些試驗證實,受漏電感影響的大信號模型與逐周期模型十分吻合,因此可考慮用于線性化應(yīng)用。
結(jié)論
在這第二部分,我們已看到漏電感如何影響反激式轉(zhuǎn)換器工作于CCM的瞬態(tài)響應(yīng)。采用PWM開關(guān)模型并考慮漏電感影響,我們能建立一個模擬逐周期模型的平均模型。這有助于證實我們的方案是正確的。它為第三部分作了鋪墊,在第三部分中我們將推導(dǎo)出轉(zhuǎn)換器的小信號響應(yīng)。
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進行處理。
推薦閱讀:
