
【導(dǎo)讀】對(duì)于智駕零部件EMC問題,我思考良久,也參與了部分測(cè)試工作。其中,關(guān)鍵的結(jié)論是:其很可能是未來智能駕駛需要跨越的一個(gè)艱難的“坎”。因?yàn)楸娝苤?,智駕的功能安全方面,要求一定是苛刻的。
EMC指標(biāo)是智能駕駛功能必須跨越的“坎“
首先,不能等同于原有電子零部件測(cè)試要求,已基本是共識(shí);其次是基于已有的電動(dòng)車輛高壓集成,智駕功能也是新增的功能。所以說,構(gòu)建智駕獨(dú)有的EMC測(cè)試體系已迫在眉睫。我們先來了解一下已有的測(cè)試案例結(jié)論,不容樂觀。
智駕零件的電磁抗擾能力是弱項(xiàng),威脅車輛功能安全
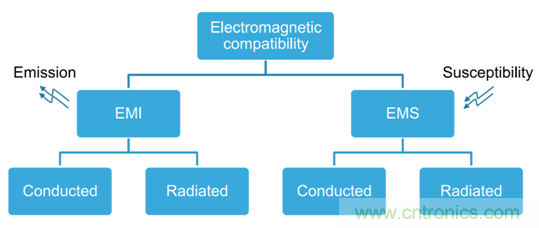
EMC 基本測(cè)試框架
正好近期讀了厚勢(shì)汽車的一篇關(guān)于“ADAS 毫米波雷達(dá)原理與電磁抗擾能力初探”的文章,更是產(chǎn)生了一些共鳴。
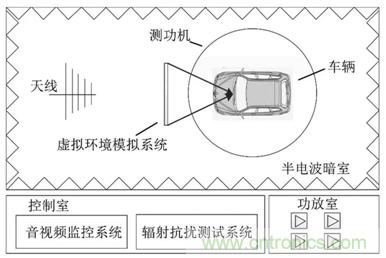
其測(cè)試結(jié)果:“在車輛前方進(jìn)行 100 V/m 垂直極化場(chǎng)的毫米波雷達(dá)系統(tǒng)抗擾測(cè)試時(shí),車輛在 20~100 MHz 頻段內(nèi)出現(xiàn)了目標(biāo)車大范圍前后移動(dòng)的情況,這種情況可能會(huì)導(dǎo)致 ADAS 控制器的誤判,造成 ACC、AEB、FCW 等功能執(zhí)行模塊的異常操作,嚴(yán)重威脅車輛的行駛安全。”“毫米波雷達(dá)系統(tǒng)抗擾試驗(yàn)測(cè)試結(jié)果顯示,在一定強(qiáng)度的場(chǎng)強(qiáng)下,電磁信號(hào)會(huì)干擾毫米波雷達(dá)系統(tǒng),影響系統(tǒng)及車輛功能。”(試驗(yàn)布置參照 ISO 11451-2:2016 標(biāo)準(zhǔn))
另一個(gè)案例的零件測(cè)試,與上述案例過程結(jié)論基本一致:特別是在RI(輻射抗擾)、ESD(靜電放電抗擾)、CIP(瞬態(tài)傳導(dǎo)抗干擾)方面,出現(xiàn)通訊中斷、卡頓、甚至損壞零件。這樣的結(jié)果,會(huì)導(dǎo)致車輛功能安全受到威脅。哪么,這其中的原因在哪里呢?
新增智駕零部件導(dǎo)入,缺乏車輛配套經(jīng)驗(yàn)
在項(xiàng)目配套中,我們經(jīng)常會(huì)遇到這樣的現(xiàn)象,一些廠家認(rèn)為過了TS16949質(zhì)量體系認(rèn)證,就可以給車輛做零件配套了。其實(shí),這還差的很遠(yuǎn),一方面,認(rèn)證的結(jié)論只能“鎖定當(dāng)時(shí)的狀態(tài)”,并不完全能代表后期的結(jié)果;另一方面,國(guó)內(nèi)企業(yè)技術(shù)的穩(wěn)定性相對(duì)較差,人員更迭頻繁,對(duì)車輛工程認(rèn)知程度不一等等,都是造成產(chǎn)品從設(shè)計(jì)環(huán)節(jié)到驗(yàn)證、標(biāo)定、性能缺失的原因之一。同時(shí),車輛本身所遭遇的電磁環(huán)境也是非常復(fù)雜和惡劣的。零件廠家,需要經(jīng)過長(zhǎng)期的經(jīng)驗(yàn)積累和配套應(yīng)用的歷練。
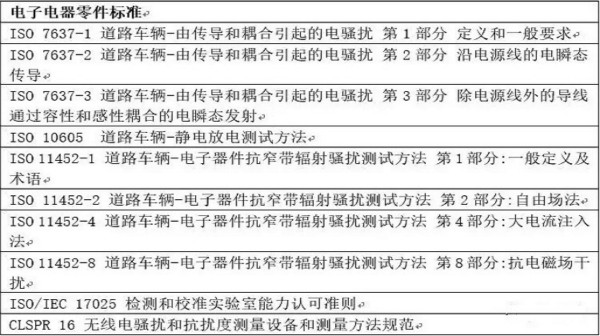
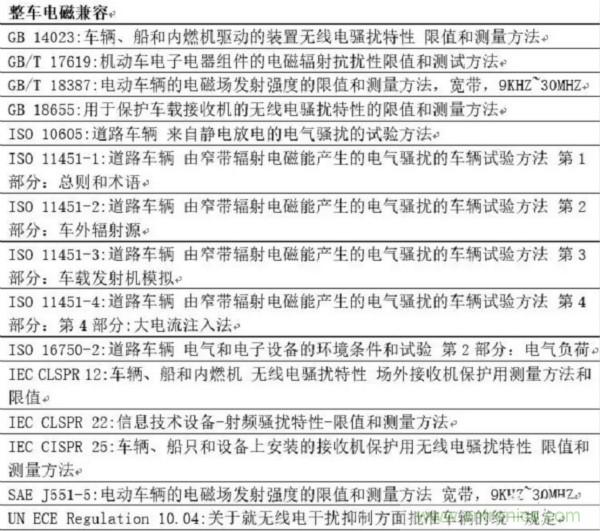
盤點(diǎn)燃油/電動(dòng)車輛EMC測(cè)試常用標(biāo)準(zhǔn)
在智能駕駛零件EMC獨(dú)有的標(biāo)準(zhǔn)成熟前,首先需要滿足現(xiàn)有標(biāo)準(zhǔn),而且需要從嚴(yán)執(zhí)行。
針對(duì)智能駕駛零件,性能等級(jí)認(rèn)定需要重新評(píng)估
在零部件測(cè)試中,結(jié)合整車要求,對(duì)測(cè)試零件性能狀態(tài),有一個(gè)等級(jí)劃分A~E 5個(gè)等級(jí),最高的一級(jí)A是:被測(cè)樣件或系統(tǒng)的所有功能在干擾之時(shí)和干擾之后正常運(yùn)轉(zhuǎn);B級(jí)要求:在受干擾時(shí),被測(cè)樣件或系統(tǒng)的所有功能正常運(yùn)轉(zhuǎn)。但是,一項(xiàng)或多項(xiàng)功能運(yùn)轉(zhuǎn)會(huì)偏離指定誤差。所有功能在干擾撤離后能自動(dòng)恢復(fù)至正常狀況,但記憶功能不能受到影響;C級(jí)要求:被測(cè)樣件或系統(tǒng)的一項(xiàng)或多項(xiàng)功能在受干擾時(shí),不能正常運(yùn)轉(zhuǎn),干擾撤離后自動(dòng)恢復(fù)至正常狀態(tài);D級(jí)的區(qū)別是,在干擾之后,也不能正常工作,需要對(duì)系統(tǒng)手動(dòng)復(fù)位。
如果單純從等級(jí)劃分,一般性零件性能測(cè)試狀態(tài),C級(jí)以上是合格的。但是對(duì)于智能駕駛零部件,C級(jí)顯然是不合理和不合格的。如果,在受干擾時(shí),零件不能正常工作,面對(duì)車輛識(shí)別、導(dǎo)航等功能的即時(shí)特性,勢(shì)必會(huì)導(dǎo)致車輛安全事故。所以,在寫入實(shí)驗(yàn)計(jì)劃中的要求,應(yīng)該是達(dá)到B級(jí),或者是A級(jí)。同時(shí),結(jié)合零部件功能安全要求的等級(jí)(ASIL),提出更精準(zhǔn)的目標(biāo)。
“功能集成”EMC測(cè)試,是高于零部件的測(cè)試環(huán)節(jié),不可或缺
印象中,寶馬的EMC測(cè)試體系非常的嚴(yán)格,其電動(dòng)車的EMC測(cè)試遵循:零部件→高壓系統(tǒng)集成→整車。同時(shí),寶馬根據(jù)電動(dòng)車輛特點(diǎn),建立起自已的一套測(cè)試辦法,這也是區(qū)別于燃油汽車的一套體系。
我們看到寶馬的測(cè)試體系中,有一個(gè)高壓系統(tǒng)獨(dú)立的測(cè)試環(huán)節(jié),我的理解是:新能源車輛本身是沿襲傳統(tǒng)燃油汽車的低壓控制功能單元,并且從成本、開發(fā)周期、成熟度的角度,新能源部分是獨(dú)立開發(fā)的?;谶@些,高壓系統(tǒng)集成,作為一個(gè)整體,獨(dú)立完成測(cè)試就不足為奇了,關(guān)鍵是要作為一個(gè)完整功能單元去測(cè)試的。但在很多項(xiàng)目中,“集成”測(cè)試環(huán)節(jié)是缺失的。仍然是把三電部分拆了單獨(dú)測(cè)試。我覺得,這是不完整的測(cè)試。如果需要整車達(dá)到優(yōu)秀的指標(biāo),在后期,這種分立的測(cè)試方式,很有可能讓零件的設(shè)計(jì),付出高昂的成本代價(jià)。
制定智能駕駛零件獨(dú)有的EMC測(cè)試標(biāo)準(zhǔn),迫在眉睫
車輛技術(shù)的飛速發(fā)展,讓功能安全問題,已經(jīng)是無處遁形。前段時(shí)間與同濟(jì)大學(xué)汽車EMC實(shí)驗(yàn)室的鄧勇老師討論EMC問題,鄧?yán)蠋煹挠^點(diǎn)我非常贊同:“未來車輛電子電器控制器的設(shè)計(jì),特別是新能源、智能駕駛電子零件,其實(shí),就是EMC的設(shè)計(jì)”。
兼于目前的發(fā)展形勢(shì),把EMC提到一定高度引起重視,越早越好,并要付諸于設(shè)計(jì)和應(yīng)用中,一定是事半功倍的事情。從另一個(gè)角度看EMC,如果按常規(guī)電子電器件設(shè)計(jì)思維,不排除最終會(huì)成為智能駕駛的攔路虎。
推薦閱讀:


